You might also like
- TriDAR White PaperDocument8 pagesTriDAR White PaperCharis SurosoNo ratings yet
- Mars Curiosity Rover FactsDocument2 pagesMars Curiosity Rover FactsAviation/Space History LibraryNo ratings yet
- Advanced Digital Signal Processing and Noise ReductionFrom EverandAdvanced Digital Signal Processing and Noise ReductionRating: 5 out of 5 stars5/5 (1)
- Quantum Well LasersFrom EverandQuantum Well LasersPeter S. Zory Jr.No ratings yet
- Microwave Electronics: Measurement and Materials CharacterizationFrom EverandMicrowave Electronics: Measurement and Materials CharacterizationNo ratings yet
- Deep Learning on Edge Computing Devices: Design Challenges of Algorithm and ArchitectureFrom EverandDeep Learning on Edge Computing Devices: Design Challenges of Algorithm and ArchitectureNo ratings yet
- Wow! What a Ride!: A Quick Trip Through Early Semiconductor and Personal Computer DevelopmentFrom EverandWow! What a Ride!: A Quick Trip Through Early Semiconductor and Personal Computer DevelopmentNo ratings yet
- Parallel and Distributed ProcessingFrom EverandParallel and Distributed ProcessingK. BoyanovNo ratings yet
- Networking and Online Games: Understanding and Engineering Multiplayer Internet GamesFrom EverandNetworking and Online Games: Understanding and Engineering Multiplayer Internet GamesRating: 5 out of 5 stars5/5 (1)
- Global Positioning: Technologies and PerformanceFrom EverandGlobal Positioning: Technologies and PerformanceRating: 5 out of 5 stars5/5 (1)
- The Martian: Stranded Astronaut's Fight for SurvivalDocument13 pagesThe Martian: Stranded Astronaut's Fight for SurvivalLaila PagdilaoNo ratings yet
- Sensors, Mechanical SensorsFrom EverandSensors, Mechanical SensorsWolfgang GöpelNo ratings yet
- Machine Learning for Future Fiber-Optic Communication SystemsFrom EverandMachine Learning for Future Fiber-Optic Communication SystemsAlan Pak Tao LauNo ratings yet
- The Design and Simulated Performance of the Attitude Determination and Control System of a Gravity Gradient Stabilized Cube SatelliteFrom EverandThe Design and Simulated Performance of the Attitude Determination and Control System of a Gravity Gradient Stabilized Cube SatelliteNo ratings yet
- Radioastronomical Methods of Antenna MeasurementsFrom EverandRadioastronomical Methods of Antenna MeasurementsA.D. KuzminNo ratings yet
- Mars Pathfinder Priority InversionDocument14 pagesMars Pathfinder Priority InversionAnthonyNo ratings yet
- Avanthi's Scientific Technological and Research Academy.: Department of Mechanical EngineeringDocument25 pagesAvanthi's Scientific Technological and Research Academy.: Department of Mechanical EngineeringSampath Kumar PesaramelliNo ratings yet
- Vxworks Vs RTLinuxDocument5 pagesVxworks Vs RTLinuxNithin RamakrishnaNo ratings yet
- L 4 Microkernel S HistoryDocument29 pagesL 4 Microkernel S HistorymjsramanNo ratings yet
- ARP Tables Lookup AlgorithmsDocument3 pagesARP Tables Lookup AlgorithmsDouglas ManginiNo ratings yet
- 0930 - Panunzio PDFDocument22 pages0930 - Panunzio PDFcoralonsoNo ratings yet
- Ros by Example Indigo Volume 2 1.1Document464 pagesRos by Example Indigo Volume 2 1.1matiasgramosNo ratings yet
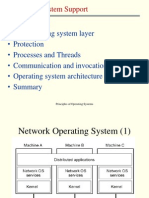
- Introduction: Operating System SupportDocument63 pagesIntroduction: Operating System SupportErmercado78No ratings yet
- Wind River VxWorks Platform 6.9 - OverviewDocument3 pagesWind River VxWorks Platform 6.9 - OverviewciruvekofNo ratings yet
- Advanced Image Processing TechniquesDocument326 pagesAdvanced Image Processing TechniquesGeo SpatialistNo ratings yet
- ROS Overview: History, Architecture and ApplicationsDocument13 pagesROS Overview: History, Architecture and ApplicationsVan Tung HaNo ratings yet
- WR Usb Vxworks 6 Programmers Guide 2.4Document209 pagesWR Usb Vxworks 6 Programmers Guide 2.4khin600No ratings yet
- Space TechnologyDocument14 pagesSpace TechnologyMukul Anil KirtaneNo ratings yet
- Multi-Level Architecture For A Swarm of Surveillance RoversDocument13 pagesMulti-Level Architecture For A Swarm of Surveillance RoversIJRASETPublications100% (1)
- Embedded Geek - Jack GanssleDocument11 pagesEmbedded Geek - Jack GanssleAakash PatilNo ratings yet
- Apache 2 Pocket Reference For Apache Programmers Administrators For Apache Programmers and Administrators Pocket Reference OreillyDocument4 pagesApache 2 Pocket Reference For Apache Programmers Administrators For Apache Programmers and Administrators Pocket Reference Oreillyotra dosNo ratings yet
- Astronomy and Computing: M. Beroiz, J.B. Cabral, B. SanchezDocument8 pagesAstronomy and Computing: M. Beroiz, J.B. Cabral, B. SanchezCarlos Alexis Alvarado Silva100% (1)
- Risat I:: OrbitDocument35 pagesRisat I:: OrbitNirmalrahul_1990No ratings yet
- Study of DVMRP, MOSPF, CBT, PIM, MBONE, EIGRP, CIDRDocument6 pagesStudy of DVMRP, MOSPF, CBT, PIM, MBONE, EIGRP, CIDRnishiNo ratings yet
- Mission AI - The New System TechnologyDocument421 pagesMission AI - The New System TechnologyKrinka V BakovićNo ratings yet
- Ebook - Robot - Sensors and Methods For Mobile Robot Positioning - 1996Document282 pagesEbook - Robot - Sensors and Methods For Mobile Robot Positioning - 1996ikasetyo100% (10)
- Programming Language - Wikipedia, The Free EncyclopediaDocument18 pagesProgramming Language - Wikipedia, The Free EncyclopediaelcorinoNo ratings yet
- FreeRTOS MelotDocument39 pagesFreeRTOS MelotKonstantin BakunovNo ratings yet
- Peer Reviewed Version: University of Bristol - Explore Bristol ResearchDocument11 pagesPeer Reviewed Version: University of Bristol - Explore Bristol ResearchRodrigodelaTorreNo ratings yet
- WR Firewall Programmers Guide 1.1 PDFDocument133 pagesWR Firewall Programmers Guide 1.1 PDFNitesh SinghNo ratings yet
- Nano RoboticsDocument17 pagesNano RoboticsSrini VasNo ratings yet
- BRKSPG 2404Document47 pagesBRKSPG 2404jguardapucllaNo ratings yet
- PhotonicDocument111 pagesPhotonicBui TheQuan100% (1)
- Ncorg Netconf Yang Tutorial PDFDocument123 pagesNcorg Netconf Yang Tutorial PDFavinash7kumar7sing-2No ratings yet
- Tornado 2 2 and VxWorks 5 5Document54 pagesTornado 2 2 and VxWorks 5 5Sreekanth LakkaNo ratings yet
- Glimpses of Indian Space ProgramDocument6 pagesGlimpses of Indian Space ProgramVikrant RaghuvanshiNo ratings yet
- Exploration of Quantum Consciousness - Enlighten Next - 2010 PDFDocument7 pagesExploration of Quantum Consciousness - Enlighten Next - 2010 PDFraduNo ratings yet
- 2019 Book ComputationalIntelligenceInSenDocument496 pages2019 Book ComputationalIntelligenceInSenKamel AbbassiNo ratings yet
- Quantum Programming LanguagesDocument13 pagesQuantum Programming LanguagesTarek SeguirNo ratings yet
- 978 981 10 4588 2 - Book - OnlinePDF PDFDocument985 pages978 981 10 4588 2 - Book - OnlinePDF PDFMahmood AdelNo ratings yet
- The Neuroscience of Autism Spectrum DisordersDocument10 pagesThe Neuroscience of Autism Spectrum DisorderssouciNo ratings yet
- The Greatest Showman PDFDocument22 pagesThe Greatest Showman PDFMJ RecordNo ratings yet
- Semiconductor Optical AmplifierDocument40 pagesSemiconductor Optical AmplifierVikas ThakurNo ratings yet
- Goethe Zertifikat b1 HorenDocument2 pagesGoethe Zertifikat b1 HorenLevent75% (4)
- Reaction Order and Rate Law Expression Worksheet KeyDocument5 pagesReaction Order and Rate Law Expression Worksheet KeyLyra GurimbaoNo ratings yet
- Jurnal Mira FixDocument16 pagesJurnal Mira Fixarisanto micoNo ratings yet
- Mercer Role and Job Analysis InfoDocument3 pagesMercer Role and Job Analysis InfojehaniaNo ratings yet
- Actor analysis explores decision-making in environmental governanceDocument48 pagesActor analysis explores decision-making in environmental governancerizkyNo ratings yet
- Examining The Structural Relationships of Destination Image, Tourist Satisfaction PDFDocument13 pagesExamining The Structural Relationships of Destination Image, Tourist Satisfaction PDFAndreea JecuNo ratings yet
- University of Cambridge International Examinations General Certificate of Education Ordinary LevelDocument12 pagesUniversity of Cambridge International Examinations General Certificate of Education Ordinary Levelmstudy123456No ratings yet
- Using Previous Years AlmanacDocument1 pageUsing Previous Years AlmanacbhabhasunilNo ratings yet
- Articulos 2022-2Document11 pagesArticulos 2022-2Nilser Enrique Valle HernandezNo ratings yet
- Why War: Einstein and Freud's Little-Known Correspondence On Violence, Peace, and Human Nature by Maria PopovaDocument24 pagesWhy War: Einstein and Freud's Little-Known Correspondence On Violence, Peace, and Human Nature by Maria PopovaVagueBlurNo ratings yet
- Ffective Riting Kills: Training & Discussion OnDocument37 pagesFfective Riting Kills: Training & Discussion OnKasi ReddyNo ratings yet
- PDI 14 Asthma Admission RateDocument2 pagesPDI 14 Asthma Admission RatejrmyfngNo ratings yet
- Mazda 6 2014 - Automatic Transaxle Workshop Manual FW6A-EL PDFDocument405 pagesMazda 6 2014 - Automatic Transaxle Workshop Manual FW6A-EL PDFFelipe CalleNo ratings yet
- Monologue Speech in A Foreign Language LessonDocument3 pagesMonologue Speech in A Foreign Language LessonResearch ParkNo ratings yet
- Fairfield Institute of Management & Technology E-Commerce: Lab/Practical File Subject Code: 112Document24 pagesFairfield Institute of Management & Technology E-Commerce: Lab/Practical File Subject Code: 112AYUSHNo ratings yet
- EnCORE V13.5 en EnglishDocument138 pagesEnCORE V13.5 en EnglishRommel SaavedraNo ratings yet
- SOP 01 Criteria For Donor SelectionDocument9 pagesSOP 01 Criteria For Donor Selectionهشام الشهيميNo ratings yet
- A Daily Morning PrayerDocument8 pagesA Daily Morning Prayerjhustine05100% (1)
- What is phonicsDocument244 pagesWhat is phonicsNelly FernandezNo ratings yet
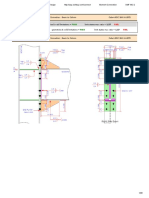
- Result Summary - Overall: Moment Connection - Beam To Column Code AISC 360-16 LRFDDocument29 pagesResult Summary - Overall: Moment Connection - Beam To Column Code AISC 360-16 LRFDYash Suthar100% (2)
- Unit 5: Structural Modelling: Block II: From Analysis To DesignDocument76 pagesUnit 5: Structural Modelling: Block II: From Analysis To DesignPatrick FarahNo ratings yet
- New Balance Case StudyDocument3 pagesNew Balance Case StudyDimas AdityaNo ratings yet
- MKTM028 FathimathDocument23 pagesMKTM028 FathimathShyamly DeepuNo ratings yet
- New Translation and Deciphering of ChineDocument14 pagesNew Translation and Deciphering of ChineRémyNo ratings yet
- A Detailed Lesson Plan in (Teaching Science)Document8 pagesA Detailed Lesson Plan in (Teaching Science)Evan Jane Jumamil67% (3)