You might also like
- Statement: Solution:: PROBLEM 2-21Document3 pagesStatement: Solution:: PROBLEM 2-21GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-35Document1 pageStatement:: PROBLEM 2-35GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Experiment No. - 2: B.S.A. College of Engg. & Technology MathuraDocument2 pagesExperiment No. - 2: B.S.A. College of Engg. & Technology MathuraROHIT SRIVASTAVNo ratings yet
- Chapter Test # 4 - Chemical BondingDocument3 pagesChapter Test # 4 - Chemical BondingSubhadip DindaNo ratings yet
- Condition A B S Minab L Maxab SL S L PQ A B C D SL Return SL PQ If Return SL PQ If Return OtherwiseDocument1 pageCondition A B S Minab L Maxab SL S L PQ A B C D SL Return SL PQ If Return SL PQ If Return OtherwiseGUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Assig3 11Document3 pagesAssig3 11Sean BotelhoNo ratings yet
- 8 SynthesisDocument8 pages8 SynthesisSunilkumar ReddyNo ratings yet
- Objectives: Laboratory 4. The Analytical Kinematics of Mechanisms With The Vector MethodDocument6 pagesObjectives: Laboratory 4. The Analytical Kinematics of Mechanisms With The Vector MethodGabriel IulianNo ratings yet
- 05 Electrostatics SupplDocument15 pages05 Electrostatics SupplccsingNo ratings yet
- 05 Electrostatics SupplyDocument15 pages05 Electrostatics SupplyccsingNo ratings yet
- RTS01 Solved Paper 11TH IPTY01N02Document21 pagesRTS01 Solved Paper 11TH IPTY01N02Neeti NepalNo ratings yet
- FTS 7 (Code A) - 10 04 2020 PDFDocument17 pagesFTS 7 (Code A) - 10 04 2020 PDFkavyareddyNo ratings yet
- Statement:: PROBLEM 2-29Document1 pageStatement:: PROBLEM 2-29GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- PRACTICE SHEET - 05 (Physics)Document7 pagesPRACTICE SHEET - 05 (Physics)ABD 17No ratings yet
- Sin J Cos E: Using The Euler Identity I.EDocument4 pagesSin J Cos E: Using The Euler Identity I.EMuhammad HamzaNo ratings yet
- T-23 System of ParticlesDocument3 pagesT-23 System of ParticlesShashi Shekhar TripathiNo ratings yet
- Mecanismos ProblemaDocument2 pagesMecanismos ProblemaManuel ChavezNo ratings yet
- Me 309-162-HW 2Document3 pagesMe 309-162-HW 2DELTAx xNo ratings yet
- Aits 1920 PT III Jeea Paper 1Document14 pagesAits 1920 PT III Jeea Paper 1mrpNo ratings yet
- Sitios IntersticialesDocument5 pagesSitios IntersticialesNellyRdzNo ratings yet
- HW 11Document2 pagesHW 11qurriyatus zahroNo ratings yet
- Path Syn 3 Pos RRRRDocument6 pagesPath Syn 3 Pos RRRRdomagix470No ratings yet
- ElasticityPolars 04 BodyForcesRotatingDiscs PDFDocument5 pagesElasticityPolars 04 BodyForcesRotatingDiscs PDFMax HinojosaNo ratings yet
- Me352 E1 Fa2009 SolDocument21 pagesMe352 E1 Fa2009 SolSteve KrodaNo ratings yet
- Statement: Solution:: PROBLEM 2-24Document1 pageStatement: Solution:: PROBLEM 2-24GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- GUJCET2016MT02 SolutionDocument14 pagesGUJCET2016MT02 SolutionvuppalasampathNo ratings yet
- CFD AnalysisDocument10 pagesCFD Analysisjairo quinteroNo ratings yet
- Application of Differential Equations To Calculations of Large Deformations of Structural MembersDocument7 pagesApplication of Differential Equations To Calculations of Large Deformations of Structural MembersMohammad YusufNo ratings yet
- Gen Meta JAP v4Document15 pagesGen Meta JAP v4juee chandrachudNo ratings yet
- A Kinematic Analysis of The Valve Timing Mechanism With Three Elements and Continuous Valve LiftDocument6 pagesA Kinematic Analysis of The Valve Timing Mechanism With Three Elements and Continuous Valve LiftIan MannNo ratings yet
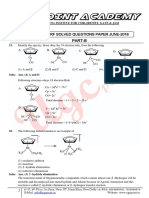
- Ugc Point Academy: Csir Net/Jrf Solved Questions Paper June-2016Document52 pagesUgc Point Academy: Csir Net/Jrf Solved Questions Paper June-2016Rams Chander100% (1)
- (@NEETpassionate) Aakash CST - 22Document19 pages(@NEETpassionate) Aakash CST - 22ABIR PAUL100% (1)
- This Study Resource WasDocument9 pagesThis Study Resource WasbhattaramrevanthNo ratings yet
- GTMnarayana PaperDocument20 pagesGTMnarayana PaperVishu PatryNo ratings yet
- Me352 E1 Su2014 SolDocument19 pagesMe352 E1 Su2014 SolirqudratNo ratings yet
- SNS Tutorial - SolutionsDocument9 pagesSNS Tutorial - Solutionslbwnb.68868No ratings yet
- Regarding To Buckling of Pipelines Subject To Axial Loading - Taylor & GainDocument6 pagesRegarding To Buckling of Pipelines Subject To Axial Loading - Taylor & Gainmarciojunior1No ratings yet
- S R R RR R R: 2 Cos 2 Cos 2 Sin 2 Sin Sin SinDocument1 pageS R R RR R R: 2 Cos 2 Cos 2 Sin 2 Sin Sin SinSathyarazor21No ratings yet
- Vectors II Tutorial 1 SolutionsDocument10 pagesVectors II Tutorial 1 Solutionslbwnb.68868No ratings yet
- ElasticityPolars 04 BodyForcesRotatingDiscsDocument5 pagesElasticityPolars 04 BodyForcesRotatingDiscsAlex CooperNo ratings yet
- Chemistry (Full Test) - Paper 3 - SolutionsDocument2 pagesChemistry (Full Test) - Paper 3 - SolutionsRavi Kiran KoduriNo ratings yet
- Full WWPDB X-Ray Structure Validation Report: May 17, 2020 05:39 Am BSTDocument16 pagesFull WWPDB X-Ray Structure Validation Report: May 17, 2020 05:39 Am BSTAna Milena Riascos GrajalesNo ratings yet
- Handout-on-Network-Analysis 4Document10 pagesHandout-on-Network-Analysis 4Janine SalvioNo ratings yet
- Hamilton Path PDFDocument5 pagesHamilton Path PDFFredNo ratings yet
- Lobe Pump Research PaperDocument10 pagesLobe Pump Research PaperReview DragonsNo ratings yet
- Sample Paper - ACST - Two Year Medical-2022Document10 pagesSample Paper - ACST - Two Year Medical-2022atulNo ratings yet
- Statement:: PROBLEM 2-13Document1 pageStatement:: PROBLEM 2-13GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Spin Test-3Document5 pagesSpin Test-3Rsrao JNo ratings yet
- Mock Test: PhysicsDocument11 pagesMock Test: PhysicsPrajakta ShettyNo ratings yet
- 100 Question 100 Min. Series ElectrostaticsDocument13 pages100 Question 100 Min. Series Electrostaticsumved singh yadavNo ratings yet
- Lakshya JEE (2024)Document9 pagesLakshya JEE (2024)sunilbadgoti488No ratings yet
- Mid Term 1 Fall 2014Document2 pagesMid Term 1 Fall 2014Mahmoud Ahmed TawfikNo ratings yet
- Truss Analysis: A Structural Mechanics Tour of The FEM-Nodal Equilibrium and CompatibilityDocument22 pagesTruss Analysis: A Structural Mechanics Tour of The FEM-Nodal Equilibrium and CompatibilitypatrickNX9420No ratings yet
- Test - 28: Final Test Series (Online) For JEE (Main) - 2021Document9 pagesTest - 28: Final Test Series (Online) For JEE (Main) - 2021Vishal kumar MauryaNo ratings yet
- Jee Main P+C+M - 02-04-2022 (Main Exam)Document24 pagesJee Main P+C+M - 02-04-2022 (Main Exam)SOHAIL MOHAMMEDNo ratings yet
- Unit 1 AssiGnment (1) AsDocument6 pagesUnit 1 AssiGnment (1) AsFHKNo ratings yet
- Answers & Solutions: NEET (UG) - 2019Document37 pagesAnswers & Solutions: NEET (UG) - 2019Sajan Kumar dhalNo ratings yet
- GT 9Document22 pagesGT 9Rubini SureshNo ratings yet
- Aits 1819 FT III Jeea Paper 2 SolDocument12 pagesAits 1819 FT III Jeea Paper 2 SolTaherNo ratings yet
- Statement:: L J J M J MDocument1 pageStatement:: L J J M J MGUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-43Document1 pageStatement:: PROBLEM 2-43GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: Inversions. How Many Distinct Inversions Does The Linkage in Row 4, Column 3 Have?Document1 pageStatement:: Inversions. How Many Distinct Inversions Does The Linkage in Row 4, Column 3 Have?GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-44Document1 pageStatement:: PROBLEM 2-44GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement: Solution:: PROBLEM 2-49Document1 pageStatement: Solution:: PROBLEM 2-49GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-56Document1 pageStatement:: PROBLEM 2-56GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-32Document1 pageStatement:: PROBLEM 2-32GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-39Document1 pageStatement:: PROBLEM 2-39GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-36Document1 pageStatement:: PROBLEM 2-36GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-53Document1 pageStatement:: PROBLEM 2-53GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-30Document1 pageStatement:: PROBLEM 2-30GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-15Document1 pageStatement:: PROBLEM 2-15GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-31Document1 pageStatement:: PROBLEM 2-31GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-25Document1 pageStatement:: PROBLEM 2-25GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement: Solution:: Problem 2-7Document2 pagesStatement: Solution:: Problem 2-7GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-18Document1 pageStatement:: PROBLEM 2-18GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- 4 D 3 1 E 5 4 G 7 I 6 1 J 8 7: StatementDocument1 page4 D 3 1 E 5 4 G 7 I 6 1 J 8 7: StatementGUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-16Document1 pageStatement:: PROBLEM 2-16GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-33Document1 pageStatement:: PROBLEM 2-33GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-38Document1 pageStatement:: PROBLEM 2-38GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement: Solution:: PROBLEM 2-50Document1 pageStatement: Solution:: PROBLEM 2-50GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement: Solution:: PROBLEM 2-10Document1 pageStatement: Solution:: PROBLEM 2-10GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-11Document1 pageStatement:: PROBLEM 2-11GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement: Solution:: PROBLEM 2-26Document1 pageStatement: Solution:: PROBLEM 2-26GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement: Solution:: Problem 2-8Document1 pageStatement: Solution:: Problem 2-8GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement: Solution:: Problem 2-9Document1 pageStatement: Solution:: Problem 2-9GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Statement:: PROBLEM 2-13Document1 pageStatement:: PROBLEM 2-13GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- 2a Theory PDFDocument41 pages2a Theory PDF5ChEA DriveNo ratings yet
- API DevDocument274 pagesAPI Devruggedboy0% (1)
- Effective Problem Solving and Decision MakingDocument46 pagesEffective Problem Solving and Decision MakingAndreeaMare1984100% (2)
- 20 Issues For Businesses Expanding InternationallyDocument24 pages20 Issues For Businesses Expanding InternationallySubash RagupathyNo ratings yet
- Absolute Duo 1 PDFDocument219 pagesAbsolute Duo 1 PDFAgnieškaRužičkaNo ratings yet
- Practice Revision Questions Number SystemsDocument1 pagePractice Revision Questions Number SystemsRavi Prasaath IXNo ratings yet
- A Practical Guide To Geostatistical - HenglDocument165 pagesA Practical Guide To Geostatistical - HenglJorge D. MarquesNo ratings yet
- Exalted 2e Sheet2 Mortal v0.1Document2 pagesExalted 2e Sheet2 Mortal v0.1Lenice EscadaNo ratings yet
- BearingsDocument63 pagesBearingsYeabsraNo ratings yet
- Sustainability Indicators: Are We Measuring What We Ought To Measure?Document8 pagesSustainability Indicators: Are We Measuring What We Ought To Measure?yrperdanaNo ratings yet
- Business Decision MakingDocument5 pagesBusiness Decision MakingShafiya CaderNo ratings yet
- Poznan University Brochure 04-05 KwalifikacjeDocument2 pagesPoznan University Brochure 04-05 KwalifikacjeRiaz CarzNo ratings yet
- IMS - General MBA - Interview QuestionsDocument2 pagesIMS - General MBA - Interview QuestionsRahulSatputeNo ratings yet
- MCQ in Engineering Economics Part 11 ECE Board ExamDocument19 pagesMCQ in Engineering Economics Part 11 ECE Board ExamDaryl GwapoNo ratings yet
- Promise To Keep by Mario BencastroDocument146 pagesPromise To Keep by Mario BencastroArte Público PressNo ratings yet
- Research Methods SESSIONS STUDENTS Abeeku PDFDocument287 pagesResearch Methods SESSIONS STUDENTS Abeeku PDFdomaina2008100% (3)
- Advanced Programme In: Fintech and Financial BlockchainDocument13 pagesAdvanced Programme In: Fintech and Financial BlockchainAshish mNo ratings yet
- Welspun One Logistics Parks: Hazard Risk AssessmentDocument2 pagesWelspun One Logistics Parks: Hazard Risk AssessmentR. Ayyanuperumal AyyanuperumalNo ratings yet
- Sri Lanka-ADB Partnership: 1966-2016Document156 pagesSri Lanka-ADB Partnership: 1966-2016Asian Development Bank100% (2)
- EEM336 - 01 - Introduction To The Microprocessor and ComputerDocument53 pagesEEM336 - 01 - Introduction To The Microprocessor and ComputersakalanNo ratings yet
- Astm D448Document3 pagesAstm D448Mutyaba Johnson100% (5)
- Engineering Council of South Africa: 1 PurposeDocument5 pagesEngineering Council of South Africa: 1 Purpose2lieNo ratings yet
- Chemistry Project On FertilizersDocument24 pagesChemistry Project On FertilizersKamal Thakur75% (4)
- Psych ManualDocument340 pagesPsych ManualMarius_20100% (1)
- Physics WebpackDocument129 pagesPhysics Webpackapi-333910330No ratings yet
- D062/D063/D065/D066 Service Manual: (Book 1 of 2) 004778MIU MainframeDocument1,347 pagesD062/D063/D065/D066 Service Manual: (Book 1 of 2) 004778MIU MainframeevpsasaNo ratings yet
- A Sourcebook in Chinese LongevityDocument34 pagesA Sourcebook in Chinese Longevitytanpausing67% (3)
- Paranthropology Vol 3 No 3Document70 pagesParanthropology Vol 3 No 3George ZafeiriouNo ratings yet
- Vmod Pht3d TutorialDocument32 pagesVmod Pht3d TutorialluisgeologoNo ratings yet