You might also like
- Understanding and Servicing Alarm SystemsFrom EverandUnderstanding and Servicing Alarm SystemsRating: 1 out of 5 stars1/5 (1)
- Ssraen 071 006 - Sra H 01 FD11Document30 pagesSsraen 071 006 - Sra H 01 FD11Eddy AlmeidaNo ratings yet
- Standard Specifications SRA-01-FD11 SRA-01A-FD11 SRA-L-01-FD11 SRA-EL-01-FD11Document42 pagesStandard Specifications SRA-01-FD11 SRA-01A-FD11 SRA-L-01-FD11 SRA-EL-01-FD11Gonzalo CánepaNo ratings yet
- ROKAE - Xmate CR - 1Document2 pagesROKAE - Xmate CR - 1nucleoroboticaNo ratings yet
- MD250MW CAN DataSheet 1642812289Document1 pageMD250MW CAN DataSheet 1642812289masNo ratings yet
- TX200 6 Axis Product Data Sheet ENDocument3 pagesTX200 6 Axis Product Data Sheet ENVăn Hiếu NguyễnNo ratings yet
- Smzen 114 003 - MZ01 01 CFDDocument20 pagesSmzen 114 003 - MZ01 01 CFDmfsNo ratings yet
- HLS12 - 4 8V-7 4V - Specsheet-V2 1-1685578787Document3 pagesHLS12 - 4 8V-7 4V - Specsheet-V2 1-1685578787Michael DjimelNo ratings yet
- Esab, Atom Arc 9018 (29-En - US-FactSheet - Main-01, 2016.10.26)Document1 pageEsab, Atom Arc 9018 (29-En - US-FactSheet - Main-01, 2016.10.26)RodrigoNo ratings yet
- Geófono SM-6Document5 pagesGeófono SM-6rommelgasparNo ratings yet
- MRT-X 2260Document6 pagesMRT-X 2260hpwebcamNo ratings yet
- Alt Atf90g 4Document24 pagesAlt Atf90g 4maulana lindungNo ratings yet
- SC700 Standard SpecificationsDocument15 pagesSC700 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- PPulseDocument2 pagesPPulseyehia sayedNo ratings yet
- S3003 DatasheetDocument1 pageS3003 DatasheetGustavo OspinoNo ratings yet
- GR600N 2Document18 pagesGR600N 2Tree TaweeNo ratings yet
- MobileSparkler Analogue SpecificationDocument2 pagesMobileSparkler Analogue SpecificationGary EngNo ratings yet
- Bao CaoDocument8 pagesBao CaoHoang PhongNo ratings yet
- Maeda LC785Document4 pagesMaeda LC785enggmohanNo ratings yet
- ZT44 - Drill - Spec SheetDocument4 pagesZT44 - Drill - Spec SheetNellsNo ratings yet
- CENTRIFUGADocument3 pagesCENTRIFUGAMary L. CaldasNo ratings yet
- All Terrain Crane ATF160G-5: Japanese SpecificationsDocument86 pagesAll Terrain Crane ATF160G-5: Japanese SpecificationsguttinateshNo ratings yet
- Powerful Performance With Low Dead Weight and High EfficiencyDocument8 pagesPowerful Performance With Low Dead Weight and High EfficiencyYusuf JosephNo ratings yet
- Product Data: DescriptionDocument2 pagesProduct Data: DescriptionChris AntoniouNo ratings yet
- Chem-Feed Diaphragm Metering Pump: FeaturesDocument4 pagesChem-Feed Diaphragm Metering Pump: FeaturesAlejandro MoralesNo ratings yet
- ATLAS 7R DatasheetDocument4 pagesATLAS 7R Datasheetarmin_kunosic9871No ratings yet
- Service Manual: Washing Machine Toploader AWT 5067/3Document14 pagesService Manual: Washing Machine Toploader AWT 5067/3ciphardNo ratings yet
- Load Chart Tadano GR 250 NDocument7 pagesLoad Chart Tadano GR 250 NPsdmMCCI2021 MECNo ratings yet
- 3-PES-149 HAGR-LTR3p LINK LogoDocument3 pages3-PES-149 HAGR-LTR3p LINK LogoFouad ToumiNo ratings yet
- Specification Sheet: EG-4000 EG-4500 EG-5000 EG-5500Document1 pageSpecification Sheet: EG-4000 EG-4500 EG-5000 EG-5500Alexander George Madden PavónNo ratings yet
- 6-Pes-150 Bap AltptDocument2 pages6-Pes-150 Bap AltptFouad ToumiNo ratings yet
- CM20200310 Ae584 72acfDocument8 pagesCM20200310 Ae584 72acfOmid JohnsonNo ratings yet
- CK1000-II: Hydraulic Crawler CraneDocument27 pagesCK1000-II: Hydraulic Crawler Cranesongyanxin_dlutNo ratings yet
- GM - 6000 20000 - L-242 41 15000 3 D - 200 24 2500 GBDocument1 pageGM - 6000 20000 - L-242 41 15000 3 D - 200 24 2500 GBEduardo Garcia SaraviaNo ratings yet
- Hyperion Atlas Programmable Digital Servos - Ds16, Ds20, Ds20X Series SpecificationsDocument1 pageHyperion Atlas Programmable Digital Servos - Ds16, Ds20, Ds20X Series Specificationsmohamed sidkyNo ratings yet
- Data Sheets - Hs Series 72.5kV/31.5kA - 2000A: Page - 1Document4 pagesData Sheets - Hs Series 72.5kV/31.5kA - 2000A: Page - 1jurica_2006No ratings yet
- CRM 2 PresentationDocument35 pagesCRM 2 Presentationtehseen banuNo ratings yet
- Especificaciones Tecnicas Scorbot ER-14Document2 pagesEspecificaciones Tecnicas Scorbot ER-14sebastian_alvarez_7No ratings yet
- Travel Times: Maximum Vibration Tolerance I/P Converter OptionsDocument6 pagesTravel Times: Maximum Vibration Tolerance I/P Converter Optionszytura2019No ratings yet
- Roughter 25 TDocument15 pagesRoughter 25 TRillo MaulanaNo ratings yet
- MRT2660 Vision+mt22a-A500Document4 pagesMRT2660 Vision+mt22a-A500yonggilNo ratings yet
- Jib CraneDocument12 pagesJib CraneHarshadNo ratings yet
- Stein E BreaderDocument4 pagesStein E BreaderAlvaro OrtizNo ratings yet
- Dual Shield II 101 1.6 MMDocument2 pagesDual Shield II 101 1.6 MMadanmeneses1No ratings yet
- Gecko HS ManualDocument51 pagesGecko HS ManualZin Ko LinnNo ratings yet
- Specification Sheet: WG-4000-B WG-4500-B WG-5000-B WG-5500-BDocument1 pageSpecification Sheet: WG-4000-B WG-4500-B WG-5000-B WG-5500-BAlexander George Madden PavónNo ratings yet
- WebGatewayAppliances PDFDocument1 pageWebGatewayAppliances PDFAlexander George Madden PavónNo ratings yet
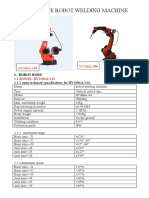
- 6-Axis Type Robot Welding MachineDocument5 pages6-Axis Type Robot Welding MachineVictor PATIÑONo ratings yet
- MZ04 Standard SpecificationsDocument29 pagesMZ04 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- Fuel System PDFDocument809 pagesFuel System PDFDiogenes CardosoNo ratings yet
- Specifications: INI Ydraulic XcavatorDocument2 pagesSpecifications: INI Ydraulic XcavatorAchariya ParpromNo ratings yet
- xs125 xs165 PDFDocument2 pagesxs125 xs165 PDFEmyuEmyuNo ratings yet
- Technical Information: Battery Model FGH20902 FGH20502 FGH21803Document2 pagesTechnical Information: Battery Model FGH20902 FGH20502 FGH21803ISlam Mohamed HassaanNo ratings yet
- Katalog Hand Tools TKRDocument11 pagesKatalog Hand Tools TKRMkks SiplahNo ratings yet
- Tel70 PDFDocument2 pagesTel70 PDFDanny Muñoz CastroNo ratings yet
- Industrial Robot: Small, Powerful and FastDocument2 pagesIndustrial Robot: Small, Powerful and FastPriyansh LaddhaNo ratings yet
- Robotics IRB140Document2 pagesRobotics IRB140craigNo ratings yet
- Ds Ihss86enDocument5 pagesDs Ihss86enRicardo G. MartinezNo ratings yet
- RetractionDocument19 pagesRetractionMoez BellamineNo ratings yet
- 3BUS092073R0001 - en MOD 300 Enhanced With Industrial ITDocument16 pages3BUS092073R0001 - en MOD 300 Enhanced With Industrial ITMoez BellamineNo ratings yet
- Development of A Mold Trial Procedure For Establishing A Robust PDocument221 pagesDevelopment of A Mold Trial Procedure For Establishing A Robust PMoez BellamineNo ratings yet
- Downloadfile 1657787326Document2 pagesDownloadfile 1657787326Moez BellamineNo ratings yet
- SIFA FW3 C1 2022 0904 - ProposalApplicationDocument13 pagesSIFA FW3 C1 2022 0904 - ProposalApplicationMoez BellamineNo ratings yet
- LM 1676 Trumatic l3030 4 KW 2001Document3 pagesLM 1676 Trumatic l3030 4 KW 2001Moez BellamineNo ratings yet
- Trumatic L 3050 4050 6050 TRUMPF BrochureDocument12 pagesTrumatic L 3050 4050 6050 TRUMPF BrochureMoez BellamineNo ratings yet
- Mvp12, 4Xm12, 5pole, Basic Housing: INTERNET DATA SHEET For Article Number 27114Document3 pagesMvp12, 4Xm12, 5pole, Basic Housing: INTERNET DATA SHEET For Article Number 27114Moez BellamineNo ratings yet
- Using Advanced CAM System in Modern Machining: The 7 International Conference On Engineering and Technology ICET-2015Document4 pagesUsing Advanced CAM System in Modern Machining: The 7 International Conference On Engineering and Technology ICET-2015Moez BellamineNo ratings yet
- LM 1649 TCL 3030 2006 2 KWDocument2 pagesLM 1649 TCL 3030 2006 2 KWMoez BellamineNo ratings yet
- Toc Pmt2204-Eng SFC2022Document8 pagesToc Pmt2204-Eng SFC2022Moez BellamineNo ratings yet
- SC2016 Yenilikler ENDocument74 pagesSC2016 Yenilikler ENMoez BellamineNo ratings yet
- SolidCAM 2018 Modules Overview PressDocument106 pagesSolidCAM 2018 Modules Overview PressMoez BellamineNo ratings yet
- Infant ERIKSON: TRUST VS MISTRUSTDocument7 pagesInfant ERIKSON: TRUST VS MISTRUSTMaikel LopezNo ratings yet
- Isotopes of Pennium LabDocument3 pagesIsotopes of Pennium Labapi-312554801No ratings yet
- Ruben Masson-Orta, A025 408 267 (BIA Nov. 9, 2017)Document2 pagesRuben Masson-Orta, A025 408 267 (BIA Nov. 9, 2017)Immigrant & Refugee Appellate Center, LLCNo ratings yet
- Triumphant Kingdom by Marley Cole, 1957Document248 pagesTriumphant Kingdom by Marley Cole, 1957sirjsslutNo ratings yet
- Experimental Study On Concrete Using Zeolite Sand and Zeolite Powder As Partly Replacement For Fine Aggregate and Cement IJERTCONV5IS13178Document3 pagesExperimental Study On Concrete Using Zeolite Sand and Zeolite Powder As Partly Replacement For Fine Aggregate and Cement IJERTCONV5IS13178alaa albalahNo ratings yet
- Jit PresentationDocument45 pagesJit PresentationJasspreet Singh SraNo ratings yet
- Cyanobacteria "The Blue Green Algae" and Its Novel Applications: A Brief ReviewDocument11 pagesCyanobacteria "The Blue Green Algae" and Its Novel Applications: A Brief ReviewAnny LovibNo ratings yet
- AO1 What Is Rock ClimbingDocument10 pagesAO1 What Is Rock ClimbingSBNoadNo ratings yet
- Vacancy Notice: 1. Who We AreDocument8 pagesVacancy Notice: 1. Who We Arezdenko2014No ratings yet
- Stat Con BDocument5 pagesStat Con BJc IsidroNo ratings yet
- Midterm Exam Vib 3 Industrial 2015Document3 pagesMidterm Exam Vib 3 Industrial 2015Judex OnyekabaNo ratings yet
- Preference of Consumer in Selected Brands of Chocolates: Conducted For Economics ProjectDocument13 pagesPreference of Consumer in Selected Brands of Chocolates: Conducted For Economics ProjectAditi Mahale100% (4)
- Risk & InsuranceDocument8 pagesRisk & InsuranceAlan100% (2)
- Eijkhout HPCtutorialsDocument230 pagesEijkhout HPCtutorialschokun9944No ratings yet
- Tennis Unit Plan: 11 and 12 Grade Matthew CummiskeyDocument15 pagesTennis Unit Plan: 11 and 12 Grade Matthew CummiskeyRafael Javier Bernabe MartinNo ratings yet
- Moroccan EconomyDocument30 pagesMoroccan EconomyChaimaâ Chakik El Mokhtari100% (1)
- Mzos, Where Learning Is Fun and Getting A Job Is Easy!Document4 pagesMzos, Where Learning Is Fun and Getting A Job Is Easy!PRASHIL SHAHNo ratings yet
- Alg 2 Trig PracticeDocument2 pagesAlg 2 Trig Practicesol songNo ratings yet
- H14YS-5B-2309-Reminder - 011424Document4 pagesH14YS-5B-2309-Reminder - 011424BẢO Nhi LêNo ratings yet
- Shivadv Atri Mshopach Arap UjanaDocument9 pagesShivadv Atri Mshopach Arap UjanaRishav DikshitNo ratings yet
- PROJECT WORK For Class 12-B Subject-COMMERCEDocument2 pagesPROJECT WORK For Class 12-B Subject-COMMERCEMariamNo ratings yet
- American Mexican WarDocument3 pagesAmerican Mexican WarDicher AlexNo ratings yet
- Rose Petal Powder BenefitsDocument7 pagesRose Petal Powder BenefitsABUBAKAR SIDDIQNo ratings yet
- 8.0.1.2 Class Activity - Can Submarines Swim InstructionsDocument2 pages8.0.1.2 Class Activity - Can Submarines Swim Instructionsradu_rudolf0% (1)
- "Overuse"-An Overused Term?: LeadersDocument4 pages"Overuse"-An Overused Term?: LeadersMeri Fitria HandayaniNo ratings yet
- Rahim2017 Article ImprovingSocialResponsibilityI PDFDocument20 pagesRahim2017 Article ImprovingSocialResponsibilityI PDFMd DidarNo ratings yet
- 367 ErpBookDocument13 pages367 ErpBooksravankumar248No ratings yet
- DISP TRUST 18 SEPTIEMBRE 2023 ClientesDocument100 pagesDISP TRUST 18 SEPTIEMBRE 2023 ClientesAlex David Dueñas QuinteroNo ratings yet
- A History of Computer Viruses - The Famous Trio': Harold Joseph Highland FICS, FACMDocument14 pagesA History of Computer Viruses - The Famous Trio': Harold Joseph Highland FICS, FACMAbdul HameedNo ratings yet
- FIELD STUDY 1 E10.1 On Teacher's Philosophy of EducationDocument7 pagesFIELD STUDY 1 E10.1 On Teacher's Philosophy of EducationLeila TaminaNo ratings yet