You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5796)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Phys 1Document5 pagesPhys 1Sandra Phan50% (2)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- EIM TrainingDocument38 pagesEIM TrainingAngela ChapmanNo ratings yet
- Viva Afrika Price List AUGUST 2017 RetailDocument29 pagesViva Afrika Price List AUGUST 2017 RetailVincent Mutambirwa33% (3)
- 1.1 Law of Demand Practice ActivityDocument4 pages1.1 Law of Demand Practice ActivityHassan Khan0% (1)
- Pump Flow Characteristic - CE117 Process TrainerDocument2 pagesPump Flow Characteristic - CE117 Process TrainerKenneth FerrerNo ratings yet
- Impact 3 Grammar BookDocument48 pagesImpact 3 Grammar BookTatiana Alekseyetseva100% (1)
- 36 DesignDocument14 pages36 DesignAscentNo ratings yet
- Pallet Carrier SynopsysDocument14 pagesPallet Carrier SynopsysAscentNo ratings yet
- Creo 6.0 oDocument33 pagesCreo 6.0 oAscentNo ratings yet
- A One Day Training Programme ON: CNC Programming With Practical ApproachDocument55 pagesA One Day Training Programme ON: CNC Programming With Practical ApproachAscentNo ratings yet
- Automatic Pallet Carrier For Small WorkshopDocument76 pagesAutomatic Pallet Carrier For Small WorkshopAscentNo ratings yet
- Grease Ep 2 Data Sheet tcsl0003Document1 pageGrease Ep 2 Data Sheet tcsl0003Abdulwahed alsafanyNo ratings yet
- Department of Business Administration: Submitted ToDocument15 pagesDepartment of Business Administration: Submitted Topinky271994No ratings yet
- Pasquali - Treatment of NMSC PDFDocument109 pagesPasquali - Treatment of NMSC PDFIvanus NicoletaNo ratings yet
- IBM Cloud Professional Certification Program: Study Guide SeriesDocument16 pagesIBM Cloud Professional Certification Program: Study Guide SeriespmmanickNo ratings yet
- Invitation AwardsDocument7 pagesInvitation AwardsNory VenturaNo ratings yet
- bIRUL LAG - 1Document3 pagesbIRUL LAG - 1Kurniawan ArikaNo ratings yet
- Fake News Detection Using Machine Learning Report FinalDocument26 pagesFake News Detection Using Machine Learning Report Finalkhs660164No ratings yet
- Cold Plasma: A Novel Non-Thermal Technology For Food ProcessingDocument12 pagesCold Plasma: A Novel Non-Thermal Technology For Food ProcessingGeanina SorocanNo ratings yet
- Doc-Design Aspects of Flexible Pavement and Quality Control ManagementDocument101 pagesDoc-Design Aspects of Flexible Pavement and Quality Control ManagementkaushikrejaNo ratings yet
- From Logic Programming To PrologDocument345 pagesFrom Logic Programming To PrologTörök Zoltán100% (3)
- Baytech Rpc3 ManualDocument88 pagesBaytech Rpc3 Manualtroy2k0No ratings yet
- Sag Tension Calculation IEEE STD 605 2008Document8 pagesSag Tension Calculation IEEE STD 605 2008Hassen LazharNo ratings yet
- Lesson Plan 8Document21 pagesLesson Plan 8Jay BolanoNo ratings yet
- Facial AsymmetryDocument41 pagesFacial AsymmetryRahul GoteNo ratings yet
- ICE QB - Mech - 6th - 2018 - 02Document8 pagesICE QB - Mech - 6th - 2018 - 02Nits KNo ratings yet
- Aashto t23 FormDocument5 pagesAashto t23 FormTuan Do VanNo ratings yet
- Johannes KepplerDocument2 pagesJohannes KepplermakNo ratings yet
- Rules of Thumb Geotech MonitoringDocument1 pageRules of Thumb Geotech MonitoringMadan Kumar AnnamNo ratings yet
- Case Study For Restaurant Queuing ModelDocument4 pagesCase Study For Restaurant Queuing ModelAndrea Zúñiga YongNo ratings yet
- Thomson BSA Lead and Ball Screws CatalogDocument94 pagesThomson BSA Lead and Ball Screws CatalogElectromateNo ratings yet
- CW CH-4 - Structure of The Atom NotesDocument8 pagesCW CH-4 - Structure of The Atom NotesasdhjkhhjksdfkjhjkhjhksfdjkhjkhNo ratings yet
- Waec Mathematics Past Questions and Answers May June 2010Document8 pagesWaec Mathematics Past Questions and Answers May June 2010FELIX YINPUKIHIT PUETYII100% (1)
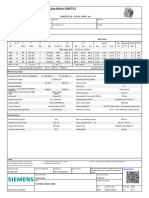
- 1LE1504-3AB23-4AB4 Datasheet enDocument1 page1LE1504-3AB23-4AB4 Datasheet enOkke BoykeNo ratings yet
- Cambridge International Examinations: This Document Consists of 7 Printed PagesDocument7 pagesCambridge International Examinations: This Document Consists of 7 Printed PagesSherazNo ratings yet