You might also like
- Lecture 1Document2 pagesLecture 1jef22No ratings yet
- Basis ApproachesDocument9 pagesBasis ApproachesAgustin FloresNo ratings yet
- Sections 1.4 Continuity: F (X) Exists But F (1) Is Not DefinedDocument9 pagesSections 1.4 Continuity: F (X) Exists But F (1) Is Not DefinedQurban HanifNo ratings yet
- HRSAT82 (Honours Research in Astronomy)Document8 pagesHRSAT82 (Honours Research in Astronomy)Mpho MokanyaneNo ratings yet
- HW1 SolutionDocument7 pagesHW1 SolutionLê QuânNo ratings yet
- Convex ProblemsDocument48 pagesConvex ProblemsAdrian GreenNo ratings yet
- Problem Set Graphical Analysis (Sudah Print)Document6 pagesProblem Set Graphical Analysis (Sudah Print)red 16No ratings yet
- OQM Lecture Note - Part 8 Unconstrained Nonlinear OptimisationDocument23 pagesOQM Lecture Note - Part 8 Unconstrained Nonlinear OptimisationdanNo ratings yet
- A Brief Survey of Differential Geometry: Adrian Down August 29, 2006Document5 pagesA Brief Survey of Differential Geometry: Adrian Down August 29, 2006NeenaKhanNo ratings yet
- One Dimensional FlowsDocument19 pagesOne Dimensional FlowsBhawan NarineNo ratings yet
- Ma1132: Advanced Calculus, Hilary 2017Document5 pagesMa1132: Advanced Calculus, Hilary 2017Teutë DomiNo ratings yet
- Dynamical Systems and Chaos - Page 14Document4 pagesDynamical Systems and Chaos - Page 14Eyek MarzanNo ratings yet
- Stability Analysis For OdesDocument13 pagesStability Analysis For OdesAbdul Latif AbroNo ratings yet
- Multivariate DistributionsDocument8 pagesMultivariate DistributionsArima AckermanNo ratings yet
- K Is An: Ramanujan GraphsDocument8 pagesK Is An: Ramanujan GraphsVinay KumarNo ratings yet
- Continuous FunctionsDocument19 pagesContinuous Functionsap021No ratings yet
- Chap1 Intro To ManifoldsDocument9 pagesChap1 Intro To ManifoldsC FNo ratings yet
- Bdm-02.03.14-Aims 2Document27 pagesBdm-02.03.14-Aims 2q2cbmbqp5xNo ratings yet
- Chapter 5 (8 Lectures)Document21 pagesChapter 5 (8 Lectures)mayankNo ratings yet
- L15 Autoregressive and Reversible ModelsDocument7 pagesL15 Autoregressive and Reversible Modelsparvathyp220246ecNo ratings yet
- Ds 5Document26 pagesDs 5Giozy OradeaNo ratings yet
- Surge and Logistic Functions InvestigationDocument19 pagesSurge and Logistic Functions InvestigationYaxuan Zhu50% (2)
- GRV and VectorsDocument2 pagesGRV and VectorsHarshaNo ratings yet
- X and X From The Interval, and For Any Positive Q and Q, Such ThatDocument4 pagesX and X From The Interval, and For Any Positive Q and Q, Such ThatKostiantyn KorolkovNo ratings yet
- Uniform Convergence PDFDocument24 pagesUniform Convergence PDFnogardnewNo ratings yet
- Lecture 5Document26 pagesLecture 5Nanditha ANo ratings yet
- Convex Optimization Overview: Zico Kolter October 19, 2007Document12 pagesConvex Optimization Overview: Zico Kolter October 19, 2007Hemil PanchiwalaNo ratings yet
- Even and Odd Functions: Sunil Kumar SinghDocument10 pagesEven and Odd Functions: Sunil Kumar SinghmrazarafiqNo ratings yet
- Continuous Distributions: Section 2Document27 pagesContinuous Distributions: Section 2eng ineera100% (1)
- Cobb DouglasDocument14 pagesCobb DouglasRob WolfeNo ratings yet
- Lecture11 (Week 12) UpdatedDocument34 pagesLecture11 (Week 12) UpdatedBrian LiNo ratings yet
- P LaplcianoDocument40 pagesP Laplcianojosue loaizaNo ratings yet
- ch01 Ma1300Document11 pagesch01 Ma1300rimskysNo ratings yet
- 4 Problem Set 4 - BifurcationsDocument6 pages4 Problem Set 4 - BifurcationsAugusto CabreraNo ratings yet
- Generating Functions: 1 From Recurrences To Closed FormDocument9 pagesGenerating Functions: 1 From Recurrences To Closed FormvarunNo ratings yet
- Equi-Statistical Convergence of Positive Linear Operators: Sevda Karaku S, Kamil DemirciDocument12 pagesEqui-Statistical Convergence of Positive Linear Operators: Sevda Karaku S, Kamil DemirciYiğit ErpakNo ratings yet
- Algebra1section5 2Document6 pagesAlgebra1section5 2api-358505269No ratings yet
- ART Onvex OptimizationDocument16 pagesART Onvex OptimizationAn Son DangNo ratings yet
- Convexity Examples: CE 377K Stephen D. Boyles Spring 2015Document11 pagesConvexity Examples: CE 377K Stephen D. Boyles Spring 2015hoalongkiemNo ratings yet
- Fourier SeriesDocument3 pagesFourier Seriesgowthambalaji1472No ratings yet
- Equality Constrained MinimizationDocument19 pagesEquality Constrained MinimizationfindingfelicityNo ratings yet
- FQT2023 1Document3 pagesFQT2023 1muay88No ratings yet
- Math 2233 Hw8 Key 2011 Differential Equations Birne BinegarDocument7 pagesMath 2233 Hw8 Key 2011 Differential Equations Birne BinegarVenkat MacharlaNo ratings yet
- Week 3 Lecture NotesDocument12 pagesWeek 3 Lecture NotesLilach NNo ratings yet
- Chapter 5, Lecture 15: Transient Reaction-Diffusion in A FilmDocument4 pagesChapter 5, Lecture 15: Transient Reaction-Diffusion in A FilmAnibal BarriosNo ratings yet
- Advanced Gradient DescentDocument14 pagesAdvanced Gradient DescentMontassar MhamdiNo ratings yet
- Analysis Distribution TH LecturesDocument79 pagesAnalysis Distribution TH Lecturespublicacc71No ratings yet
- Ps 6Document10 pagesPs 6Gurvir SinghNo ratings yet
- 9 Spin Stabilization: 9.1 StabilityDocument8 pages9 Spin Stabilization: 9.1 StabilityMBNo ratings yet
- Uniform ConvergenceDocument76 pagesUniform ConvergenceTomi DimovskiNo ratings yet
- TranscribeDocument5 pagesTranscribeSoumyadip MondalNo ratings yet
- Part 2 - Probability Distribution FunctionsDocument31 pagesPart 2 - Probability Distribution FunctionsSabrinaFuschettoNo ratings yet
- Convex Functions: 3.1 First AcquaintanceDocument36 pagesConvex Functions: 3.1 First AcquaintanceAfreen RizviNo ratings yet
- Divisib2 PDFDocument34 pagesDivisib2 PDFjkkNo ratings yet
- ThetalogDocument16 pagesThetalogSimos SoldatosNo ratings yet
- Math 432 - Real Analysis II: Solutions Homework Due February 4Document2 pagesMath 432 - Real Analysis II: Solutions Homework Due February 4Asfaw AyeleNo ratings yet
- GR Exercise 1Document4 pagesGR Exercise 1Keshav PrasadNo ratings yet
- Probability Review: Lecture Notes: Part 1 Basic Distributions and MomentsDocument10 pagesProbability Review: Lecture Notes: Part 1 Basic Distributions and MomentstaoranqiuNo ratings yet
- Cosmology in (2 + 1) -Dimensions, Cyclic Models, and Deformations of M2,1. (AM-121), Volume 121From EverandCosmology in (2 + 1) -Dimensions, Cyclic Models, and Deformations of M2,1. (AM-121), Volume 121No ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Another Student Killed: AL Men Bag 53pc, Independents 45pcDocument12 pagesAnother Student Killed: AL Men Bag 53pc, Independents 45pcMasud Rana RajibNo ratings yet
- TDS 2021 06 03 Bangladesh MAI 5 - 10 9a68b1 30112021122218 UxzDocument1 pageTDS 2021 06 03 Bangladesh MAI 5 - 10 9a68b1 30112021122218 UxzMasud Rana RajibNo ratings yet
- New AUST MCQ MathDocument13 pagesNew AUST MCQ MathMohiuddin NaeemNo ratings yet
- Student Protests: A New Life Form Is Possible: Looking Beyond The Security Dialogue On AfghanistanDocument1 pageStudent Protests: A New Life Form Is Possible: Looking Beyond The Security Dialogue On AfghanistanMasud Rana RajibNo ratings yet
- TDS 2021 06 03 Bangladesh MAI 5 - 10 9a68b1 30112021122218 UxzDocument1 pageTDS 2021 06 03 Bangladesh MAI 5 - 10 9a68b1 30112021122218 UxzMasud Rana RajibNo ratings yet
- Nov162021 Bscs 151Document2 pagesNov162021 Bscs 151Aminul OpuNo ratings yet
- Student Protests: A New Life Form Is Possible: Looking Beyond The Security Dialogue On AfghanistanDocument1 pageStudent Protests: A New Life Form Is Possible: Looking Beyond The Security Dialogue On AfghanistanMasud Rana RajibNo ratings yet
- An Introduction To Riemannian Geometry PDFDocument476 pagesAn Introduction To Riemannian Geometry PDFcxiii100% (6)
- A - ©eqi 2020-21 Gi 21 Gi RB Evsjv 'K E Vs Ki Gy' VBXWZ Nvlyvcî Cökvk Mfb©I, Evsjv 'K E VSK Gi E E Cökvk DCJ ŸDocument3 pagesA - ©eqi 2020-21 Gi 21 Gi RB Evsjv 'K E Vs Ki Gy' VBXWZ Nvlyvcî Cökvk Mfb©I, Evsjv 'K E VSK Gi E E Cökvk DCJ Ÿমো. জসীমউদ্দীনNo ratings yet
- Sahil Sharma-1-2 PDFDocument2 pagesSahil Sharma-1-2 PDFSahil SharmaNo ratings yet
- Individual Essay Eldymar.Document20 pagesIndividual Essay Eldymar.Eldymar Zyrin Alejo (Utoy)No ratings yet
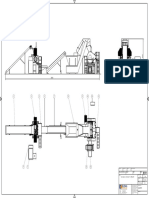
- Tyre Plant C / SC1412T + MPR160T: Title: 1: 50 A3Document3 pagesTyre Plant C / SC1412T + MPR160T: Title: 1: 50 A3asciacion hermandad HispanocolombianaNo ratings yet
- Kollmorgen AKM - ServomotorDocument44 pagesKollmorgen AKM - ServomotorMiguel GonzalezNo ratings yet
- RSA Security Analytics ESA Configuration GuideDocument48 pagesRSA Security Analytics ESA Configuration GuideAbdourahmane thiaw100% (1)
- GAD 43/43e Installation Manual: 190-00899-00 December 2014 Revision HDocument67 pagesGAD 43/43e Installation Manual: 190-00899-00 December 2014 Revision HSidinei MatucciNo ratings yet
- Conducting Research in A PandemicDocument23 pagesConducting Research in A PandemicRech SarzabaNo ratings yet
- Release Strategy PO With FioriDocument11 pagesRelease Strategy PO With FioriAymen AddouiNo ratings yet
- Module 4: Linear Inequalities Learning OutcomesDocument3 pagesModule 4: Linear Inequalities Learning OutcomesAra DucusinNo ratings yet
- Media Information LiteracyDocument50 pagesMedia Information LiteracyAngelo BateNo ratings yet
- Object-Oriented Modeling and Design With UML, 2nd EditionDocument501 pagesObject-Oriented Modeling and Design With UML, 2nd EditionUmar Jawad100% (1)
- Inxpect SRE 200 Series EC-Type - 3 - 00022 - enDocument4 pagesInxpect SRE 200 Series EC-Type - 3 - 00022 - enMaximiliano CascoNo ratings yet
- Java Everywhere A Comprehensive GuideDocument8 pagesJava Everywhere A Comprehensive Guidemhesenli7No ratings yet
- Esp32-C3 Technical Reference Manual enDocument577 pagesEsp32-C3 Technical Reference Manual enDooLooNo ratings yet
- QB Services Engagement LetterDocument2 pagesQB Services Engagement LetterJoshua UmaliNo ratings yet
- Review Article: Fast Transforms in Image Processing: Compression, Restoration, and ResamplingDocument24 pagesReview Article: Fast Transforms in Image Processing: Compression, Restoration, and ResamplingManu ManuNo ratings yet
- CNAi Import Export InstructionsDocument12 pagesCNAi Import Export InstructionsSokratesNo ratings yet
- IBC100-e IntDocument2 pagesIBC100-e IntavryoneNo ratings yet
- Net Integration Using Message Broker and Ibm Integration BusDocument55 pagesNet Integration Using Message Broker and Ibm Integration BusMiguel Angel Hernández RuizNo ratings yet
- OWN FullDocument352 pagesOWN FullMalek MohamedNo ratings yet
- Fs2311001 Autopulse AP 100 Product Overview Us DigitalDocument2 pagesFs2311001 Autopulse AP 100 Product Overview Us DigitalengrjameschanNo ratings yet
- HCL Case StudyDocument37 pagesHCL Case StudySubham PalNo ratings yet
- Multilayer Campus Architectures & Design Principles: BRKCRS-2031Document90 pagesMultilayer Campus Architectures & Design Principles: BRKCRS-2031Charles Raou-igreNo ratings yet
- An Analysis of The Cloud Computing Security ProblemDocument8 pagesAn Analysis of The Cloud Computing Security ProblemKarthik KrishnamurthiNo ratings yet
- SDM03B60DAS DatasheetDocument4 pagesSDM03B60DAS Datasheetanuj antalNo ratings yet
- DriverEasy PCInfoDocument3 pagesDriverEasy PCInfoDiego GómezNo ratings yet
- FMIFIIT - FI Line Item Table in Funds Management - LeanXDocument8 pagesFMIFIIT - FI Line Item Table in Funds Management - LeanXDeepakNo ratings yet
- Globacom Hybid Power Solution Installation Guide Cosmos-LibreDocument18 pagesGlobacom Hybid Power Solution Installation Guide Cosmos-LibreLuis MadridNo ratings yet
- 943-Article Text-943-1-10-20160308Document8 pages943-Article Text-943-1-10-20160308sosoNo ratings yet
- Vaporwave: Politics, Protest, and IdentityDocument20 pagesVaporwave: Politics, Protest, and IdentityjuanchoNo ratings yet