You might also like
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"From EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Rating: 2.5 out of 5 stars2.5/5 (2)
- 8 PuzzleDocument3 pages8 PuzzleRenato MendizabalNo ratings yet
- wk4 Prog Assign 8 Puzzle PDFDocument3 pageswk4 Prog Assign 8 Puzzle PDFMax YadlovskiyNo ratings yet
- 8-Puzzle Programming AssignmentDocument3 pages8-Puzzle Programming AssignmentivaneshubhamNo ratings yet
- 3 8 (Amar)Document23 pages3 8 (Amar)Nitin RaoNo ratings yet
- December: 6.034 Final Examination SolutionsDocument26 pagesDecember: 6.034 Final Examination SolutionsMaria SilvaNo ratings yet
- 8 PuzzleDocument2 pages8 PuzzleJessie SethdavidNo ratings yet
- FIT1029: Tutorial 4 Solutions Semester 1, 2014: Task 1Document8 pagesFIT1029: Tutorial 4 Solutions Semester 1, 2014: Task 1Ali AlabidNo ratings yet
- Solutions To Algorithms PS 4Document20 pagesSolutions To Algorithms PS 4Juan DuchimazaNo ratings yet
- 8 Queens Problem AlgorithmDocument3 pages8 Queens Problem Algorithmroopashreemurugan7No ratings yet
- Informed Search v1Document31 pagesInformed Search v1Jiawei TanNo ratings yet
- Problem 1: Informed Search: 15-381: Artificial IntelligenceDocument7 pagesProblem 1: Informed Search: 15-381: Artificial IntelligenceeBeliBalaNo ratings yet
- Artifical IntelligenceDocument5 pagesArtifical IntelligenceSibga saeed AkhtarNo ratings yet
- Design & Analysis of Algorithms Mcs 031 Assignment FreeDocument15 pagesDesign & Analysis of Algorithms Mcs 031 Assignment Freecutehacker22No ratings yet
- Solving 4x5 Dots-And-Boxes: Joseph K. Barker and Richard E KorfDocument2 pagesSolving 4x5 Dots-And-Boxes: Joseph K. Barker and Richard E KorfFauziah RustamNo ratings yet
- BacktrackingDocument10 pagesBacktrackingJordan Cook-IrwinNo ratings yet
- Theory Hw4Document5 pagesTheory Hw4Sami AlmasagediNo ratings yet
- Solutions-Heuristic SearchDocument7 pagesSolutions-Heuristic Searchm22ai569No ratings yet
- Final ExercisesDocument13 pagesFinal ExercisesAshish DarjiNo ratings yet
- Example:: (A Complete Solution Site)Document9 pagesExample:: (A Complete Solution Site)Naveen ChandraNo ratings yet
- final projectDocument5 pagesfinal projectejadamousaNo ratings yet
- Assignment 2 (1)Document4 pagesAssignment 2 (1)aneetachristo94No ratings yet
- 34 Assignment 7 Where Am IDocument6 pages34 Assignment 7 Where Am Iioane5No ratings yet
- LinearAlgebra Author BenjaminDocument491 pagesLinearAlgebra Author BenjaminAlok ThakkarNo ratings yet
- Assignment 2Document6 pagesAssignment 2emily petersNo ratings yet
- Use of Recursion and DP in Board GamesDocument25 pagesUse of Recursion and DP in Board GamesRajneesh GoyalNo ratings yet
- A Search and Min Mix SearchDocument10 pagesA Search and Min Mix SearchMuhmmad AliNo ratings yet
- DAA Selected QuestionsDocument9 pagesDAA Selected QuestionsVandana SharmaNo ratings yet
- Midterm Practice Problems: N N 1 N 2 N 3 N 4Document10 pagesMidterm Practice Problems: N N 1 N 2 N 3 N 4Lionel CarlosNo ratings yet
- Imran Rasool Bbe-1586Document9 pagesImran Rasool Bbe-1586M shahzaibNo ratings yet
- Heuristic Search TechniquesDocument19 pagesHeuristic Search TechniquesSwapnil JoshiNo ratings yet
- 6.034 Quiz 2 November 17, 2003: Name EmailDocument20 pages6.034 Quiz 2 November 17, 2003: Name EmailsssbulbulNo ratings yet
- Exam 2015Document12 pagesExam 2015Md. Sazzad HossainNo ratings yet
- 1 Complexity and RecursionDocument6 pages1 Complexity and RecursionShuvadeep DasNo ratings yet
- AI FNAL ALL 8 IGDocument7 pagesAI FNAL ALL 8 IGsmallempNo ratings yet
- Haskell1 2Document11 pagesHaskell1 2MuneebNo ratings yet
- DAA Unit 5Document14 pagesDAA Unit 5hari karanNo ratings yet
- MSCS - Algorithm Analysis Assignment 3Document1 pageMSCS - Algorithm Analysis Assignment 3Robin AwalNo ratings yet
- 6.034 Quiz 1 October 13, 2005: Name EmailDocument15 pages6.034 Quiz 1 October 13, 2005: Name Emailارسلان علیNo ratings yet
- Department of Computer Science and Business Systems: Artificial Intelligence (CB630)Document11 pagesDepartment of Computer Science and Business Systems: Artificial Intelligence (CB630)Vardhan ReddyNo ratings yet
- Tetris ShortDocument2 pagesTetris ShortleonardovariniNo ratings yet
- Algorithm AddDocument6 pagesAlgorithm AddFatin Faridah ShaharinNo ratings yet
- Multidimensional Arrays s4Document5 pagesMultidimensional Arrays s4Bushahiro EmmyNo ratings yet
- Shop-The-Look Lens-nxtDocument7 pagesShop-The-Look Lens-nxtSravya RameshNo ratings yet
- Sorting Algorithms 20222 NotesDocument135 pagesSorting Algorithms 20222 NotesSaba RaeesNo ratings yet
- Ignou Mcs 031 Solved PaperDocument7 pagesIgnou Mcs 031 Solved PaperGaurav Sood0% (2)
- Algo TechDocument5 pagesAlgo TechAnsu KumarNo ratings yet
- CS135 Assignment 10 Skyscrapers PuzzleDocument9 pagesCS135 Assignment 10 Skyscrapers Puzzleuser2357No ratings yet
- Tetris: A Heuristic Study: Using Height-Based Weighing Functions and Breadth-First Search Heuristics For Playing TetrisDocument24 pagesTetris: A Heuristic Study: Using Height-Based Weighing Functions and Breadth-First Search Heuristics For Playing Tetrisarsie minNo ratings yet
- 2 DArraysDocument7 pages2 DArraysdnlkabaNo ratings yet
- Linear RegressionDocument14 pagesLinear RegressionSaad AhmedNo ratings yet
- Zio2011 QpaperDocument7 pagesZio2011 Qpaperrask2k1No ratings yet
- Ku Assignment 4th Sem 41Document9 pagesKu Assignment 4th Sem 41Rachit KhandelwalNo ratings yet
- Stable/Patient Sort: Bit-Manipulation-To-Solve-Problems-Easily-And-EfficientlyDocument2 pagesStable/Patient Sort: Bit-Manipulation-To-Solve-Problems-Easily-And-EfficientlymmjonNo ratings yet
- Lecture 5: Backtracking: Depth-First Search N-Queens Problem Hamiltonian CircuitsDocument16 pagesLecture 5: Backtracking: Depth-First Search N-Queens Problem Hamiltonian Circuitsnano6174No ratings yet
- 2.6 NotesDocument5 pages2.6 NotesRajesh VeeraNo ratings yet
- Cyberquest: PrabhanjanDocument3 pagesCyberquest: PrabhanjanAshutosh KumarNo ratings yet
- SodapdfDocument16 pagesSodapdfJoel JoNo ratings yet
- Computer Project #10: CSE 231 Spring 2020Document19 pagesComputer Project #10: CSE 231 Spring 2020Zah UzzielNo ratings yet
- Backtracking Dfs BfsDocument8 pagesBacktracking Dfs BfskatzumatoNo ratings yet
- CSE 322 Socket Programming Assignment 1Document3 pagesCSE 322 Socket Programming Assignment 1Anonymous pEjvosqNo ratings yet
- Thermodynamics HSC Physics 2nd MCQ Question With AnswerDocument2 pagesThermodynamics HSC Physics 2nd MCQ Question With AnswerAnonymous pEjvosqNo ratings yet
- July2021 EngDocument1 pageJuly2021 EngAnonymous pEjvosqNo ratings yet
- Application To The Board of Undergraduate Studies, CSE: Case in #11Document1 pageApplication To The Board of Undergraduate Studies, CSE: Case in #11Anonymous pEjvosqNo ratings yet
- A Aio Ary: Perro ArteDocument5 pagesA Aio Ary: Perro ArteAnonymous pEjvosqNo ratings yet
- Shell ScriptsDocument31 pagesShell ScriptsAnonymous pEjvosqNo ratings yet
- CSE 216 Project ListDocument1 pageCSE 216 Project ListAnonymous pEjvosqNo ratings yet
- ERD Practice LectureDocument3 pagesERD Practice LectureAnonymous pEjvosqNo ratings yet
- A Star SearchDocument56 pagesA Star SearchAnonymous pEjvosqNo ratings yet
- CSE 314 Shell CommandsDocument26 pagesCSE 314 Shell CommandsAnonymous pEjvosqNo ratings yet
- Python Developer: and Is Experienced in Data Architecture and Fast Paced Software DevelopmentDocument1 pagePython Developer: and Is Experienced in Data Architecture and Fast Paced Software DevelopmentAnonymous pEjvosqNo ratings yet
- CSE 314: Operating Systems Sessional: Shell Tips & TricksDocument9 pagesCSE 314: Operating Systems Sessional: Shell Tips & TricksAnonymous pEjvosqNo ratings yet
- Assembly 8086Document11 pagesAssembly 8086Anonymous pEjvosqNo ratings yet
- Permutations Using S Tracks and QueuesDocument10 pagesPermutations Using S Tracks and QueuesAnonymous pEjvosqNo ratings yet
- HR Schema Queries and PL SQL ProgramsDocument3 pagesHR Schema Queries and PL SQL Programschakri_vc25% (4)
- 3 NetworkLayer Part1.ppt - 0Document63 pages3 NetworkLayer Part1.ppt - 0Anonymous pEjvosqNo ratings yet
- 01 Entity-Relationship ModelingDocument76 pages01 Entity-Relationship ModelingSamin YeaserNo ratings yet
- Thesis Topics (Well Nourished Version)Document19 pagesThesis Topics (Well Nourished Version)Anonymous pEjvosqNo ratings yet
- HR Schema Queries and PL SQL ProgramsDocument3 pagesHR Schema Queries and PL SQL Programschakri_vc25% (4)
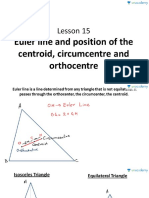
- Relationship Between Orthocentre, Centroid and CircumcentreDocument4 pagesRelationship Between Orthocentre, Centroid and CircumcentreAnonymous pEjvosqNo ratings yet
- Basic Graph Theory by MSR PDFDocument199 pagesBasic Graph Theory by MSR PDFKamal HussainNo ratings yet
- Graph Searching PDFDocument67 pagesGraph Searching PDFAnonymous pEjvosqNo ratings yet
- Finding Out The Centroid, Circumcenter, Incenter, Orthocenter of A Triangle.Document8 pagesFinding Out The Centroid, Circumcenter, Incenter, Orthocenter of A Triangle.Anonymous pEjvosqNo ratings yet
- Import Public Class Public Static Void Try New New New: Java IoDocument1 pageImport Public Class Public Static Void Try New New New: Java IoAnonymous pEjvosqNo ratings yet
- Book 1Document2 pagesBook 1Anonymous pEjvosqNo ratings yet
- Spur DrainageDocument3 pagesSpur DrainageAnonymous pEjvosqNo ratings yet
- Oop in Python Best ResourcesDocument1 pageOop in Python Best ResourcesSamuel ForknerNo ratings yet
- 04 SortingDocument52 pages04 SortingRaman GuptaNo ratings yet
- Section Ring Fields IntroDocument11 pagesSection Ring Fields IntroRomaRio TambunanNo ratings yet
- MAMAWODocument6 pagesMAMAWOjcb buraga100% (1)
- Lecture 9 Binary Search TreesDocument28 pagesLecture 9 Binary Search TreesMuhammad Owais khanNo ratings yet
- 1.9.4 Test (TST) - Foundations of Geometry (Test)Document15 pages1.9.4 Test (TST) - Foundations of Geometry (Test)Eshan PatelNo ratings yet
- Midterm Exam in Discrete StructureDocument3 pagesMidterm Exam in Discrete StructureGuevarra KeithNo ratings yet
- Logic GatesDocument8 pagesLogic GatesPaul Justine Ruelson MeriolesNo ratings yet
- René L. Schilling - (Solution Manual) Measures, Integrals & Martingales (2022)Document344 pagesRené L. Schilling - (Solution Manual) Measures, Integrals & Martingales (2022)mohameed abofayedNo ratings yet
- Kinds of SetsDocument18 pagesKinds of SetsPjungNo ratings yet
- Peter T. Geach - Logic MattersDocument344 pagesPeter T. Geach - Logic MattersPaweł Poradowski100% (1)
- MIT 6.006 Quiz 3 SolutionsDocument10 pagesMIT 6.006 Quiz 3 SolutionsKhatia IvanovaNo ratings yet
- GRADE 8 - Quarter 3 MATHEMATICAL SYSTEMDocument6 pagesGRADE 8 - Quarter 3 MATHEMATICAL SYSTEMjerome campoNo ratings yet
- Syllabus DSADocument8 pagesSyllabus DSASandesh Chhetri0% (1)
- Assignment 2 SpecificationDocument3 pagesAssignment 2 SpecificationRazinNo ratings yet
- Set Language Important Questions: MathsDocument3 pagesSet Language Important Questions: MathsNagaraj ViswanathanNo ratings yet
- Birla Institute of Technology and Science, Pilani Pilani Campus Instruction DivisionDocument3 pagesBirla Institute of Technology and Science, Pilani Pilani Campus Instruction DivisionAyush SharmaNo ratings yet
- Operators Question 1Document21 pagesOperators Question 1rahul rastogiNo ratings yet
- Arieli and Avron - Reasoning With Logica BillaticesDocument40 pagesArieli and Avron - Reasoning With Logica BillaticesMorganNo ratings yet
- Huffman TreeDocument10 pagesHuffman Treepritam nayakNo ratings yet
- Dire Dawa University: Department of Computer Science 2 Year StudentsDocument22 pagesDire Dawa University: Department of Computer Science 2 Year Studentssara woldeyohannes100% (1)
- COMP 2119: Solution For Assign-Ment 2Document9 pagesCOMP 2119: Solution For Assign-Ment 2Lavabo At LavaboNo ratings yet
- Math With Bad DrawingsDocument547 pagesMath With Bad Drawings성소영100% (8)
- Water Resources Development and Management OptimizationDocument72 pagesWater Resources Development and Management OptimizationHalwa KhoiriNo ratings yet
- Cs606 Solved Mcqs Final Term by JunaidDocument39 pagesCs606 Solved Mcqs Final Term by Junaidrizwan aliNo ratings yet
- Divide and Conquer Algorithm AnalysisDocument21 pagesDivide and Conquer Algorithm AnalysisAbhishek DubeyNo ratings yet
- Unit - 2 Combinational Logic CircuitsDocument39 pagesUnit - 2 Combinational Logic CircuitsWaleed HåšhįmNo ratings yet
- Order and Arithmetic of Cardinalities - Pete L ClarkDocument8 pagesOrder and Arithmetic of Cardinalities - Pete L ClarkronalduckNo ratings yet
- Set TheoryDocument25 pagesSet TheoryPurushothama ReddyNo ratings yet
- SETS, RELATIONS AND FUNCTIONSDocument8 pagesSETS, RELATIONS AND FUNCTIONSkhv_19No ratings yet
- Short Answer Type QuestionsDocument2 pagesShort Answer Type QuestionssivaNo ratings yet
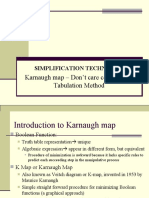
- Karnaugh Map - Don't Care Conditions - Tabulation Method: Simplification TechniquesDocument31 pagesKarnaugh Map - Don't Care Conditions - Tabulation Method: Simplification TechniquesMithun GoudaNo ratings yet