You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- ESR-2196 Hilti Self-Drilling and Self-Piercing ScrewsDocument10 pagesESR-2196 Hilti Self-Drilling and Self-Piercing ScrewsjeffuangNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Icces Esr3037Document18 pagesIcces Esr3037jeffuangNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- 5 5 PDFDocument17 pages5 5 PDFKaushal GhimireNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Iapmo Ues Er493Document13 pagesIapmo Ues Er493jeffuangNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Toeless FootingDocument1 pageToeless FootingjeffuangNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- ICC ES ESR 3027 For Kwik HUS EZ Test Report ASSET DOC TEST REPORT 0212Document20 pagesICC ES ESR 3027 For Kwik HUS EZ Test Report ASSET DOC TEST REPORT 0212jeffuangNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Atkore-Unistrut 00002 13 77 79 100 127 CATDocument5 pagesAtkore-Unistrut 00002 13 77 79 100 127 CATjeffuangNo ratings yet
- Hilti KB3 ESR 1385 1 2007Document4 pagesHilti KB3 ESR 1385 1 2007jeffuangNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Amirzehni, 2016 PDFDocument253 pagesAmirzehni, 2016 PDFEduardoNo ratings yet
- Effect of Earthquake Characteristics On The Permanent Displacement of A Cantilever Retaining WallDocument8 pagesEffect of Earthquake Characteristics On The Permanent Displacement of A Cantilever Retaining WalljeffuangNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Seismic Earth Pressures On Deep Building BasementsDocument12 pagesSeismic Earth Pressures On Deep Building BasementsNicole CarrilloNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Design Load Data For Typical Unistrut Channel ConnectionsDocument5 pagesDesign Load Data For Typical Unistrut Channel ConnectionsjeffuangNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Finite-Element Study For Seismic Structural and Global Stability of Cantilevered-Type Retaining WallsDocument19 pagesFinite-Element Study For Seismic Structural and Global Stability of Cantilevered-Type Retaining WallsjeffuangNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Finite Element Performance-Based Approach To Correlate Movement of A Rigid Retaining Wall With Seismic Earth PressureDocument73 pagesA Finite Element Performance-Based Approach To Correlate Movement of A Rigid Retaining Wall With Seismic Earth PressurejeffuangNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Able of Ontents: July 2019Document36 pagesAble of Ontents: July 2019kyrheeNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Carlsbad Cds 02.03.14 1Document25 pagesCarlsbad Cds 02.03.14 1jeffuangNo ratings yet
- Unistrut Opm 0295 13 (Page 5c 1)Document1 pageUnistrut Opm 0295 13 (Page 5c 1)jeffuangNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- S4.0 Code Based ExemptionsDocument8 pagesS4.0 Code Based ExemptionsjeffuangNo ratings yet
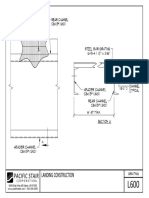
- l600 Grating Landing ConstructionDocument1 pagel600 Grating Landing ConstructionjeffuangNo ratings yet
- General FittingsDocument30 pagesGeneral FittingsjeffuangNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Carlsbad Cds 02.03.14 1Document25 pagesCarlsbad Cds 02.03.14 1jeffuangNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Wing Shape Fittings: P2223 P2343 R-LDocument4 pagesWing Shape Fittings: P2223 P2343 R-LjeffuangNo ratings yet
- X FCM Direct Fastening Technology Manual DFTM 2018 Product Page Technical Information ASSET DOC 2597845Document10 pagesX FCM Direct Fastening Technology Manual DFTM 2018 Product Page Technical Information ASSET DOC 2597845Thao TaoNo ratings yet
- IKG Bar Grating - AnchoringDocument5 pagesIKG Bar Grating - AnchoringjeffuangNo ratings yet
- Tesis Unvi MichiganDocument297 pagesTesis Unvi MichiganenucasNo ratings yet
- BG19 Spacing Stainless Steel Load TableDocument1 pageBG19 Spacing Stainless Steel Load TablejeffuangNo ratings yet
- l600 Series Grating LandingDocument1 pagel600 Series Grating LandingPrakashNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- s600 Series Grating StairDocument2 pagess600 Series Grating StairPrakashNo ratings yet
- BG19 Spacing Aluminum Load TableDocument1 pageBG19 Spacing Aluminum Load TablejeffuangNo ratings yet
- TDI Turbo T100-CS 1 Product SheetDocument1 pageTDI Turbo T100-CS 1 Product Sheetandistwn99No ratings yet
- Uniformly Accelerated MotionDocument3 pagesUniformly Accelerated MotionIsmail FaizanNo ratings yet
- Series 20 Axial Piston Pumps: Technical InformationDocument20 pagesSeries 20 Axial Piston Pumps: Technical InformationTan JaiNo ratings yet
- U3 - 2-D4E Power Shift OperacionDocument35 pagesU3 - 2-D4E Power Shift Operacionchristian vergaray gonzales100% (1)
- Wind Speed in Sri Lanka PDFDocument15 pagesWind Speed in Sri Lanka PDFsandrock92100% (1)
- Peng Robinson Virial Equations of State ComparisonDocument7 pagesPeng Robinson Virial Equations of State Comparisondix6ieNo ratings yet
- Kinematics of Projectile MotionDocument23 pagesKinematics of Projectile MotiontgimranNo ratings yet
- SM-6-2017 DefDocument6 pagesSM-6-2017 DefazizNo ratings yet
- Portal Frame Knee Connection Report SampleDocument5 pagesPortal Frame Knee Connection Report SampleozbuildNo ratings yet
- Disassembly and Assembly 3500C Marine Engines PDFDocument132 pagesDisassembly and Assembly 3500C Marine Engines PDFlancaster27100% (5)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Honda Activa 125 Dealer PriceDocument2 pagesHonda Activa 125 Dealer PricevivekNo ratings yet
- Conexão Manômetro EN 837 PDFDocument4 pagesConexão Manômetro EN 837 PDFJoana MellerNo ratings yet
- Checklist Oil BargeDocument10 pagesChecklist Oil BargealsitorNo ratings yet
- (Asce) 0733-9445 (1989) 115 8 (2016)Document13 pages(Asce) 0733-9445 (1989) 115 8 (2016)kgapuNo ratings yet
- Pinned Base Plates 5Document1 pagePinned Base Plates 5pawkomNo ratings yet
- HOW TO Design A Pump System PDFDocument17 pagesHOW TO Design A Pump System PDFwidhihartantoNo ratings yet
- Natural Ventilation PDFDocument7 pagesNatural Ventilation PDFDebasis DasguptaNo ratings yet
- SPC P-S30 - 71065 - PartsDocument346 pagesSPC P-S30 - 71065 - Partsyassine zaoualiNo ratings yet
- Force at Kaplan Turbine Wheel: 1. Tangent Force T or T: T BXDocument7 pagesForce at Kaplan Turbine Wheel: 1. Tangent Force T or T: T BXAndi SetyawanNo ratings yet
- How Does A Boomerang WorkDocument15 pagesHow Does A Boomerang WorkspaceskipperNo ratings yet
- Continuum Common Beam FormulasDocument5 pagesContinuum Common Beam FormulasRavi MulimaniNo ratings yet
- Dimensional Analysis (DA)Document48 pagesDimensional Analysis (DA)Lusambo SimpasaNo ratings yet
- Pharmaceutical EngineeringDocument284 pagesPharmaceutical EngineeringPankesh Agrawal100% (1)
- PLN-1200-3.07-01, Iss 01 - Product Catalogue PDFDocument12 pagesPLN-1200-3.07-01, Iss 01 - Product Catalogue PDFsakscribNo ratings yet
- Final1 PDFDocument10 pagesFinal1 PDFAngelica SantiagoNo ratings yet
- DWM 8010 PDFDocument23 pagesDWM 8010 PDFFLASH_2401No ratings yet
- Energy Efficiency of Refrigeration Systems PDFDocument11 pagesEnergy Efficiency of Refrigeration Systems PDFSafaa Hameed Al NaseryNo ratings yet
- KEB - proII ppt2 Sheet MetalDocument85 pagesKEB - proII ppt2 Sheet MetalKEBIRNo ratings yet
- IX. Syllabus:: Text BooksDocument1 pageIX. Syllabus:: Text BookscnjoyusNo ratings yet
- 6.M - Georgin F - IngDocument4 pages6.M - Georgin F - IngclauNo ratings yet
- The Encyclopedia of Misinformation: A Compendium of Imitations, Spoofs, Delusions, Simulations, Counterfeits, Impostors, Illusions, Confabulations, Skullduggery, ... Conspiracies & Miscellaneous FakeryFrom EverandThe Encyclopedia of Misinformation: A Compendium of Imitations, Spoofs, Delusions, Simulations, Counterfeits, Impostors, Illusions, Confabulations, Skullduggery, ... Conspiracies & Miscellaneous FakeryRating: 4 out of 5 stars4/5 (3)
- The Book: Only the Greatest Lists in the History of ListoryFrom EverandThe Book: Only the Greatest Lists in the History of ListoryRating: 5 out of 5 stars5/5 (4)
- The NES Encyclopedia: Every Game Released for the Nintendo Entertainment SystemFrom EverandThe NES Encyclopedia: Every Game Released for the Nintendo Entertainment SystemRating: 4 out of 5 stars4/5 (4)
- Encyclopedia of Spirits: The Ultimate Guide to the Magic of Fairies, Genies, Demons, Ghosts, Gods & GoddessesFrom EverandEncyclopedia of Spirits: The Ultimate Guide to the Magic of Fairies, Genies, Demons, Ghosts, Gods & GoddessesRating: 5 out of 5 stars5/5 (4)
- The Encyclopedia of Magickal Ingredients: A Wiccan Guide to SpellcastingFrom EverandThe Encyclopedia of Magickal Ingredients: A Wiccan Guide to SpellcastingRating: 4.5 out of 5 stars4.5/5 (26)
- The Calisthenics Codex: Fifty Exercises for Functional FitnessFrom EverandThe Calisthenics Codex: Fifty Exercises for Functional FitnessRating: 4 out of 5 stars4/5 (9)
- The SNES Encyclopedia: Every Game Released for the Super Nintendo Entertainment SystemFrom EverandThe SNES Encyclopedia: Every Game Released for the Super Nintendo Entertainment SystemRating: 4.5 out of 5 stars4.5/5 (3)