You might also like
- DTC Codes Mercedes CPC4 EnglishDocument24 pagesDTC Codes Mercedes CPC4 Englishjonny david martinez perez100% (1)
- Basis of Design - Pig Launcher & ReceiverDocument9 pagesBasis of Design - Pig Launcher & ReceiverAndreas Schlager100% (5)
- Bend Detector for Pipelines Locates Manufactured and Field ElbowsDocument12 pagesBend Detector for Pipelines Locates Manufactured and Field Elbowsmohammad dehghanfarsiNo ratings yet
- United States Patent (19) 11) Patent Number: 4,811,792Document8 pagesUnited States Patent (19) 11) Patent Number: 4,811,792MuhammadNo ratings yet
- US20140302938A1Document15 pagesUS20140302938A1雷黎明No ratings yet
- United States Patent (19) : Anderson Et Al. 54 Yacht Mast 11) 4,072,121Document7 pagesUnited States Patent (19) : Anderson Et Al. 54 Yacht Mast 11) 4,072,12112348No ratings yet
- Precise control body sail with adjustable boomDocument8 pagesPrecise control body sail with adjustable boom63No ratings yet
- United States Patent (19) : 11) Patent Number: 5,181,477 45 Date of Patent: Jan. 26, 1993Document10 pagesUnited States Patent (19) : 11) Patent Number: 5,181,477 45 Date of Patent: Jan. 26, 199312348No ratings yet
- United States Patent: 72 Inventor Richard F. ReinkeDocument13 pagesUnited States Patent: 72 Inventor Richard F. Reinkeعبد الحليم رغدةNo ratings yet
- United States Patent (191: Egashira (11) 4,310,281Document12 pagesUnited States Patent (191: Egashira (11) 4,310,281rajaguru20003No ratings yet
- Ellis LupuDocument6 pagesEllis LupuPaul Ciprian TeglaNo ratings yet
- United States Patent (19) : Jan. 12, 1988 11 Patent Number: (45. Date of PatentDocument15 pagesUnited States Patent (19) : Jan. 12, 1988 11 Patent Number: (45. Date of PatentAjla vNo ratings yet
- Precise Portable Concentricity GaugeDocument10 pagesPrecise Portable Concentricity GaugeendhylakausuNo ratings yet
- US460Document5 pagesUS460bbNo ratings yet
- United States Patent (19) : GravelineDocument15 pagesUnited States Patent (19) : Graveline155No ratings yet
- United States PatentDocument6 pagesUnited States Patent155No ratings yet
- US3977531Document15 pagesUS3977531Huy Nguyễn Võ XuânNo ratings yet
- United States PatentDocument13 pagesUnited States Patent63No ratings yet
- Rail Transporting MachineDocument7 pagesRail Transporting MachineAkashNo ratings yet
- United States Patent (19) : 11 Patent Number: 4,925,142 45 Date of Patent: May 15, 1990Document8 pagesUnited States Patent (19) : 11 Patent Number: 4,925,142 45 Date of Patent: May 15, 1990ALEX BNo ratings yet
- United States Patent (19) 11 Patent Number: 5,626,614: Hart 45 Date of Patent: May 6, 1997Document10 pagesUnited States Patent (19) 11 Patent Number: 5,626,614: Hart 45 Date of Patent: May 6, 1997Alex KattamisNo ratings yet
- Meccanismo LockDocument11 pagesMeccanismo LockMarco Raneo PezzanoNo ratings yet
- Conveyor Belt Transfers Ice Bodies From Storage to Dispensing AreaDocument6 pagesConveyor Belt Transfers Ice Bodies From Storage to Dispensing AreaRodrigoPomaNo ratings yet
- Patent Application Publication (10) Pub. No.: US 2006/0118021 A1Document13 pagesPatent Application Publication (10) Pub. No.: US 2006/0118021 A1sam a g mNo ratings yet
- Design PatentDocument6 pagesDesign PatentSuresh JNo ratings yet
- United States Patent (19) : Ammen Et AlDocument9 pagesUnited States Patent (19) : Ammen Et Al55No ratings yet
- Patent for High Speed Bogie with Torsion-Soft Corner-Stiff FrameDocument10 pagesPatent for High Speed Bogie with Torsion-Soft Corner-Stiff FrameRizki Fajar NovantoNo ratings yet
- United States Patent (19) : Debarge Dec. 17, 1985Document9 pagesUnited States Patent (19) : Debarge Dec. 17, 198563No ratings yet
- US4624203Document11 pagesUS4624203524No ratings yet
- United States Patent: (45) July 4, 1972Document4 pagesUnited States Patent: (45) July 4, 1972Lidya SimatupangNo ratings yet
- Us 4812080Document10 pagesUs 4812080JonNo ratings yet
- Dual split tubing hanger seal for oil and gas wellsDocument10 pagesDual split tubing hanger seal for oil and gas wellsabodolkuhaaNo ratings yet
- United States PatentDocument10 pagesUnited States Patent63No ratings yet
- Fan DetailsDocument6 pagesFan DetailsShivom SharmaNo ratings yet
- United States Patent (19) : 73) Assignee: Children's Hospital at Stanford, PaloDocument7 pagesUnited States Patent (19) : 73) Assignee: Children's Hospital at Stanford, PaloLaura CursaruNo ratings yet
- Tornillos y Placas 2Document10 pagesTornillos y Placas 2NicolásNo ratings yet
- Meccanismo T.R.Document6 pagesMeccanismo T.R.Marco Raneo PezzanoNo ratings yet
- US5304036Document24 pagesUS5304036wen longNo ratings yet
- Patent for ambient air vaporizer with dissimilar materials couplingDocument12 pagesPatent for ambient air vaporizer with dissimilar materials couplingJaime Ocampo SalgadoNo ratings yet
- Us 5593228Document10 pagesUs 5593228Soma GhoshNo ratings yet
- Knee ScooterDocument8 pagesKnee ScooterYona OuNo ratings yet
- Fied Feb. 5, 1967: 2. Sheets-Sheet LDocument5 pagesFied Feb. 5, 1967: 2. Sheets-Sheet L155No ratings yet
- Pipe Layer With Side BoomDocument14 pagesPipe Layer With Side BoomAndré Meirelles100% (1)
- United States Patent: (54) SailboatDocument5 pagesUnited States Patent: (54) Sailboat155No ratings yet
- Ballesta Con Redirección de CuerdaDocument7 pagesBallesta Con Redirección de CuerdaDamian CampilloNo ratings yet
- US6575294Document9 pagesUS6575294AdailsonNo ratings yet
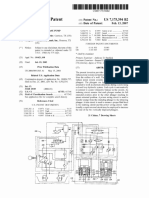
- United States Patent: (12) (10) Patent No.: US 7,175,394 B2Document14 pagesUnited States Patent: (12) (10) Patent No.: US 7,175,394 B2saeedNo ratings yet
- US8033754Document10 pagesUS8033754Ator VastatinNo ratings yet
- Us 20110278520Document11 pagesUs 20110278520احمد عبدالكريمNo ratings yet
- United States Patent: (12) (10) Patent No.: US 7,165,759 B2Document8 pagesUnited States Patent: (12) (10) Patent No.: US 7,165,759 B2Vijay KotiNo ratings yet
- United States Patent (19) : Peyman 45 Date of Patent: Aug. 15, 1989Document7 pagesUnited States Patent (19) : Peyman 45 Date of Patent: Aug. 15, 1989155No ratings yet
- United States Patent (10) Patent No.: US 8,919,272 B2Document10 pagesUnited States Patent (10) Patent No.: US 8,919,272 B263No ratings yet
- Stable Wave Motor Converts Ocean Wave EnergyDocument9 pagesStable Wave Motor Converts Ocean Wave Energy454No ratings yet
- United States Patent (19) : Shaped Contact Members Stretched Therein, and WhichDocument6 pagesUnited States Patent (19) : Shaped Contact Members Stretched Therein, and WhichDnyaneshwar Dattatraya PhadatareNo ratings yet
- US527955Document5 pagesUS527955moonstarNo ratings yet
- United States Patent 19: TaylorDocument6 pagesUnited States Patent 19: Taylor63No ratings yet
- Iiihiii: United States PatentDocument9 pagesIiihiii: United States PatentmarlondijiNo ratings yet
- United States Patent (10) Patent No.: US 8,590,068 B2Document10 pagesUnited States Patent (10) Patent No.: US 8,590,068 B2Alex KattamisNo ratings yet
- US4893426Document7 pagesUS4893426Jean DelaronciereNo ratings yet
- Patent for Hydro-Lift Boat Hull Offering Greater Stability and SpeedDocument8 pagesPatent for Hydro-Lift Boat Hull Offering Greater Stability and Speedاحمد عبدالكريمNo ratings yet
- United States Patent: Chang Et AlDocument9 pagesUnited States Patent: Chang Et AlEric Manuel Mercedes AbreuNo ratings yet
- Mechanical Appliances, Mechanical Movements and Novelties of ConstructionFrom EverandMechanical Appliances, Mechanical Movements and Novelties of ConstructionRating: 4 out of 5 stars4/5 (2)
- Finite Element Method Applied to Structural Mechanics Problems Using Strong FormulationDocument3 pagesFinite Element Method Applied to Structural Mechanics Problems Using Strong Formulationmohammad dehghanfarsiNo ratings yet
- Aeroelastic Analysis of Aircraft Wings: Proposal For Master Thesis in Aerospace or Mechanical EngineeringDocument5 pagesAeroelastic Analysis of Aircraft Wings: Proposal For Master Thesis in Aerospace or Mechanical Engineeringmohammad dehghanfarsiNo ratings yet
- A New Approach To Solve Beam Deflection Problems Using The Method of SegmentDocument21 pagesA New Approach To Solve Beam Deflection Problems Using The Method of SegmentAurora VillalunaNo ratings yet
- Aeroelastic Analysis of Aircraft Wings: Proposal For Master Thesis in Aerospace or Mechanical EngineeringDocument5 pagesAeroelastic Analysis of Aircraft Wings: Proposal For Master Thesis in Aerospace or Mechanical Engineeringmohammad dehghanfarsiNo ratings yet
- European Patent Application: Apparatus For Pipeline InspectionDocument12 pagesEuropean Patent Application: Apparatus For Pipeline Inspectionmohammad dehghanfarsiNo ratings yet
- United States PatentDocument7 pagesUnited States Patentmohammad dehghanfarsiNo ratings yet
- NX Nastran Aeroelastic Analysis User's GuideDocument10 pagesNX Nastran Aeroelastic Analysis User's Guidemohammad dehghanfarsiNo ratings yet
- Flight Envelope Protections Using Phase Plane Limits and Backstepping ControlDocument18 pagesFlight Envelope Protections Using Phase Plane Limits and Backstepping Controlmohammad dehghanfarsiNo ratings yet
- Pipeline Pig Rupture Disc Locates Stuck PigsDocument10 pagesPipeline Pig Rupture Disc Locates Stuck Pigsmohammad dehghanfarsiNo ratings yet
- I. "I in 7": United States PatentDocument6 pagesI. "I in 7": United States Patentmohammad dehghanfarsiNo ratings yet
- NX Nastran Aeroelastic Analysis User's GuideDocument10 pagesNX Nastran Aeroelastic Analysis User's Guidemohammad dehghanfarsiNo ratings yet
- European Patent Application: Apparatus For Pipeline InspectionDocument12 pagesEuropean Patent Application: Apparatus For Pipeline Inspectionmohammad dehghanfarsiNo ratings yet
- EMRAX 188 Technical Data Table: Manual For EMRAX Motors / Generators - Version 5.4 - 5 of March 2020Document3 pagesEMRAX 188 Technical Data Table: Manual For EMRAX Motors / Generators - Version 5.4 - 5 of March 2020sanskar mahtoNo ratings yet
- DNVGL CG 0039Document22 pagesDNVGL CG 0039g_daNo ratings yet
- EMRAX 188 Technical Data Table: Manual For EMRAX Motors / Generators - Version 5.4 - 5 of March 2020Document3 pagesEMRAX 188 Technical Data Table: Manual For EMRAX Motors / Generators - Version 5.4 - 5 of March 2020sanskar mahtoNo ratings yet
- Method for Flutter Open Loop Aero-ServoelasticAnalysisDocument12 pagesMethod for Flutter Open Loop Aero-ServoelasticAnalysismohammad dehghanfarsiNo ratings yet
- Forced Convection Heat Transfer MechanismsDocument11 pagesForced Convection Heat Transfer Mechanismsjarek3aNo ratings yet
- Fine Element Method Using NastranDocument84 pagesFine Element Method Using Nastranirbar.darmansyah.alwiNo ratings yet
- Emerging Aviation Technologies - Progress in The Electrification of AircraftDocument14 pagesEmerging Aviation Technologies - Progress in The Electrification of AircraftMohits952No ratings yet
- Nastran 2018.2 IOG-v1Document257 pagesNastran 2018.2 IOG-v1mohammad dehghanfarsiNo ratings yet
- Fine Element Method Using NastranDocument84 pagesFine Element Method Using Nastranirbar.darmansyah.alwiNo ratings yet
- S1.8 Template of REAL Table For Power and Supporting CompetenciesDocument3 pagesS1.8 Template of REAL Table For Power and Supporting CompetenciesJamir SalongaNo ratings yet
- RSA Industries, India - Products - Care - Polymeric Non Ionic Fabric Softener - Fabric Softener (RSF-H-SOFT)Document3 pagesRSA Industries, India - Products - Care - Polymeric Non Ionic Fabric Softener - Fabric Softener (RSF-H-SOFT)crplzNo ratings yet
- Sidhil - ICT Design EngineerDocument3 pagesSidhil - ICT Design Engineeratif_aman123No ratings yet
- Acid-Base Titration Using PH Meter and Finding The Equivalence Point Naoh ConcentrationDocument8 pagesAcid-Base Titration Using PH Meter and Finding The Equivalence Point Naoh ConcentrationYocobSamandrewsNo ratings yet
- A Review of Agricultural Drought Assessment With Remote Sensing Data: Methods, Issues, Challenges and OpportunitiesDocument14 pagesA Review of Agricultural Drought Assessment With Remote Sensing Data: Methods, Issues, Challenges and Opportunitiesاسامة نعمة جبارNo ratings yet
- MS6711 Data Mining Homework 1: 1.1 Implement K-Means Manually (8 PTS)Document6 pagesMS6711 Data Mining Homework 1: 1.1 Implement K-Means Manually (8 PTS)Yihan WangNo ratings yet
- Marivy Abella ResearchDocument43 pagesMarivy Abella ResearchRo Gi LynNo ratings yet
- Template PharmaconDocument4 pagesTemplate PharmaconDanang RaharjoNo ratings yet
- 1Document5 pages1qweqweNo ratings yet
- Growatt Warranty Procedure - 07-09-2020Document9 pagesGrowatt Warranty Procedure - 07-09-2020Design TeamNo ratings yet
- Class Xii Appendix-Iii: Colligative PropertiesDocument3 pagesClass Xii Appendix-Iii: Colligative PropertiesSrijan JaiswalNo ratings yet
- PB ManualDocument23 pagesPB ManualwilyNo ratings yet
- Rabbani Env 3Document298 pagesRabbani Env 3Arnob SarkerNo ratings yet
- How To Make Lampblack - AllDocument6 pagesHow To Make Lampblack - AllclaudjiuNo ratings yet
- GARAM ModelDocument40 pagesGARAM ModelprasunmathurNo ratings yet
- Eco 121 Set 2 Fundamentals of EconomicsDocument3 pagesEco 121 Set 2 Fundamentals of EconomicsShadreck CharlesNo ratings yet
- m5 Mage The AscensionDocument20 pagesm5 Mage The AscensionQuentin Agnes0% (1)
- CBSE Class 10 Maths Sample Paper Set 6Document4 pagesCBSE Class 10 Maths Sample Paper Set 6darshilsinghgharwarNo ratings yet
- Senthamarai Kannan S V (Kannan) Oracle SCM and Oracle MFG, Oracle ASCP (PTP/OTC/WMS/ASCP/INV/PIM/OPM) Manager/Sr Manager/Functional LeadDocument8 pagesSenthamarai Kannan S V (Kannan) Oracle SCM and Oracle MFG, Oracle ASCP (PTP/OTC/WMS/ASCP/INV/PIM/OPM) Manager/Sr Manager/Functional LeadKarunya KannanNo ratings yet
- Emebet Kebede FINALDocument65 pagesEmebet Kebede FINALTefeNo ratings yet
- Choose the Right Low Boy Trailer ModelDocument42 pagesChoose the Right Low Boy Trailer ModelOdlnayer AllebramNo ratings yet
- Oromia State UniversityDocument65 pagesOromia State UniversityEYOB AHMEDNo ratings yet
- Taeka HaileleulDocument167 pagesTaeka HaileleulBini100% (1)
- ECMT1020 - Week 06 WorkshopDocument4 pagesECMT1020 - Week 06 Workshopperthwashington.j9t23No ratings yet
- Practice Reading GraphsDocument4 pagesPractice Reading GraphsSharon TaylorNo ratings yet
- 4 A CompiledDocument167 pages4 A CompiledArjun MiddhaNo ratings yet
- 1st Summative Test in Tle SmawDocument2 pages1st Summative Test in Tle Smawjenky agnoteNo ratings yet
- 01 A Beginner's Guide To TajikiDocument384 pages01 A Beginner's Guide To Tajikitaryuman100% (1)