You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- 2-3 Form of BowDocument24 pages2-3 Form of BowBayang SilamNo ratings yet
- Caribbean Maritime Institute Diploma in International Shipping & LogisticsDocument23 pagesCaribbean Maritime Institute Diploma in International Shipping & LogisticsBayang SilamNo ratings yet
- Moisture Buffering Capacity of Hygroscopic Building Materials: Experimental Facilities and Energy ImpactDocument13 pagesMoisture Buffering Capacity of Hygroscopic Building Materials: Experimental Facilities and Energy ImpactBayang SilamNo ratings yet
- A Survey On Facilities For Experimental Internet of Things ResearchDocument14 pagesA Survey On Facilities For Experimental Internet of Things ResearchBayang SilamNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
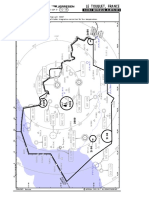
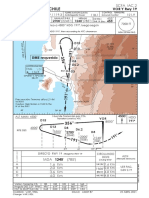
- Lfat/Ltq Le Touquet, France: .Radar - Minimum.AltitudesDocument10 pagesLfat/Ltq Le Touquet, France: .Radar - Minimum.AltitudesAurelien FLUTEAUXNo ratings yet
- Science 7 Q4 SLM2Document14 pagesScience 7 Q4 SLM2Seen Tuna-dough50% (2)
- Topographic Map of Higgins SouthDocument1 pageTopographic Map of Higgins SouthHistoricalMapsNo ratings yet
- Geodetic Survey of Two Order "CDocument27 pagesGeodetic Survey of Two Order "CAlexNo ratings yet
- Chartplotter Compatibility Guide: Products Content and FeaturesDocument2 pagesChartplotter Compatibility Guide: Products Content and FeaturesRimantas VaiciusNo ratings yet
- Changes: Nil: This Chart Is A Part of Navigraph Charts and Is Intended For Flight Simulation Use OnlyDocument46 pagesChanges: Nil: This Chart Is A Part of Navigraph Charts and Is Intended For Flight Simulation Use OnlytomrachNo ratings yet
- Examinations Leading To The Award of Certificate of CompetencyDocument2 pagesExaminations Leading To The Award of Certificate of CompetencyUwem ItangNo ratings yet
- AAI manages India's airportsDocument13 pagesAAI manages India's airportsSivaNo ratings yet
- EPWA ILS Y RWY 11Document2 pagesEPWA ILS Y RWY 11Filip NextNo ratings yet
- RadNav Chp7 NDB ADFDocument56 pagesRadNav Chp7 NDB ADFNiyazi Cem GürsoyNo ratings yet
- Deck Log Book Entries - NavLibDocument9 pagesDeck Log Book Entries - NavLibLaur MarianNo ratings yet
- System Description - Infotainment and Navigation SystemDocument14 pagesSystem Description - Infotainment and Navigation SystemergdegNo ratings yet
- Master's Standing Orders-nOTESDocument5 pagesMaster's Standing Orders-nOTESrigelNo ratings yet
- Celestial Navigation Instruments GuideDocument9 pagesCelestial Navigation Instruments GuidenickkarlisNo ratings yet
- ENC Symbol Quick GuideDocument1 pageENC Symbol Quick GuideMayankdeep Singh100% (3)
- Universal FMC 146 ProfessionalDocument58 pagesUniversal FMC 146 ProfessionalCristianoVelosodeQueirozNo ratings yet
- General NavigationDocument163 pagesGeneral NavigationYahya Yıldırım95% (21)
- Malaysia ThailandDocument1 pageMalaysia Thailandibnu syahNo ratings yet
- OTHTTS1Document2 pagesOTHTTS1Marcos VelasquezNo ratings yet
- Flight Procedures Kai Tak VHHX: For IVAO Only, DO NOT Use For Real World NavigationDocument14 pagesFlight Procedures Kai Tak VHHX: For IVAO Only, DO NOT Use For Real World NavigationSpeedbird 1No ratings yet
- IcarusDocument3 pagesIcarus026255No ratings yet
- Nav 04 - Pilot CardDocument4 pagesNav 04 - Pilot Cardnikita danilovNo ratings yet
- Operators Manual FURUNODocument498 pagesOperators Manual FURUNOClaudiu Tudor100% (1)
- Geography 02 - Solar System Latitude and Longitude - DPP 02Document2 pagesGeography 02 - Solar System Latitude and Longitude - DPP 02shantanukumthekar007No ratings yet
- Kelompok 14 - Tugas 6Document7 pagesKelompok 14 - Tugas 6brian yeremiasNo ratings yet
- NAV LOGDocument23 pagesNAV LOG-Samuel- GimenesNo ratings yet
- Abbreviations Used in Airway ManualDocument10 pagesAbbreviations Used in Airway ManualA Joaquin Campo M100% (1)
- Scfa Iac 2Document1 pageScfa Iac 2Carlos EduardoNo ratings yet
- MK 70/25 Flight Plan from Geneva to MauritiusDocument74 pagesMK 70/25 Flight Plan from Geneva to MauritiusBertrand ClxNo ratings yet
- DAL0134 Flight Dispatch ReleaseDocument55 pagesDAL0134 Flight Dispatch ReleaseMark McKinsnkeyNo ratings yet