You might also like
- Automatic Transmissions and Transaxles Halderman Automotive SeriesDocument314 pagesAutomatic Transmissions and Transaxles Halderman Automotive SeriesDavide Binelli100% (2)
- Smith D. - Arduino For Complete Idiots - 2017Document175 pagesSmith D. - Arduino For Complete Idiots - 2017Audi Tresnawan89% (18)
- Arduino For Beginners REV2Document32 pagesArduino For Beginners REV2tony445100% (5)
- Changfa Diesel: SpecificationsDocument1 pageChangfa Diesel: SpecificationsAliNo ratings yet
- Arduino Development Cookbook - Sample ChapterDocument35 pagesArduino Development Cookbook - Sample ChapterPackt Publishing100% (1)
- Arduino SBS Draft Notes May 2015Document303 pagesArduino SBS Draft Notes May 2015Sadık DelioğluNo ratings yet
- Arduino SBS Draft Notes May 2015Document303 pagesArduino SBS Draft Notes May 2015Nguyen TriNo ratings yet
- Manoj Thakur - Arduino Projects Vol-I - With Proteus Simulation Files. Don't Just Read It, Try ItDocument138 pagesManoj Thakur - Arduino Projects Vol-I - With Proteus Simulation Files. Don't Just Read It, Try Itkamikaza007100% (14)
- Smart Home Automation System Using Iot and BluetoothDocument6 pagesSmart Home Automation System Using Iot and BluetoothaniNo ratings yet
- Arduino Coursework OutlineDocument23 pagesArduino Coursework Outlineraoul850% (1)
- Arduino Based Heart Beat SensorDocument21 pagesArduino Based Heart Beat SensorSandeep KumarNo ratings yet
- Reading Digital Callipers With An Arduino USBDocument9 pagesReading Digital Callipers With An Arduino USBSampath WeragodaNo ratings yet
- ArduinoDocument34 pagesArduinosairam_9100% (11)
- Assignment About ArduinoDocument3 pagesAssignment About ArduinoDon LemonNo ratings yet
- Advanced View Arduino Projects List - Use Arduino For Projects-3Document57 pagesAdvanced View Arduino Projects List - Use Arduino For Projects-3Bilal AfzalNo ratings yet
- Use Your Android Phone Sensors On The ArduinoDocument19 pagesUse Your Android Phone Sensors On The Arduinomarius_danila8736No ratings yet
- User GuidesDocument88 pagesUser GuidesThaj MohaideenNo ratings yet
- Zlib - Pub Arduino Programming Tip and Tricks To Learn Arduino Programming EfficientlyDocument157 pagesZlib - Pub Arduino Programming Tip and Tricks To Learn Arduino Programming EfficientlyyosNo ratings yet
- Arduino: The Ultimate Guide to Arduino for Beginners Including Arduino Basics, Tips & Tricks, Projects, and More!From EverandArduino: The Ultimate Guide to Arduino for Beginners Including Arduino Basics, Tips & Tricks, Projects, and More!No ratings yet
- Computer 9 Module 11Document6 pagesComputer 9 Module 11Lester LaurenteNo ratings yet
- Arduino For BeginnersDocument21 pagesArduino For Beginnerssumeetplayz954No ratings yet
- DIY USB Midi Controller With Arduino A Beginners GDocument55 pagesDIY USB Midi Controller With Arduino A Beginners GAndré CorenzanNo ratings yet
- 03 Arduino Manual v2Document102 pages03 Arduino Manual v2CHRISTIAN DEO ESPIRITUNo ratings yet
- ARDUINO PROGRAMMING FOR BEGINNERS: A Comprehensive Beginner's Guide to Learn the Realms of Arduino Programming from A-ZFrom EverandARDUINO PROGRAMMING FOR BEGINNERS: A Comprehensive Beginner's Guide to Learn the Realms of Arduino Programming from A-ZNo ratings yet
- Arduino For Beginners PDFDocument16 pagesArduino For Beginners PDFPushkar DeyNo ratings yet
- Touchless Faucet Using Arduino Final TPDocument29 pagesTouchless Faucet Using Arduino Final TPGEORGE FRIDERIC HANDELNo ratings yet
- 2007 - Super - Started - Kit - Guid BookDocument62 pages2007 - Super - Started - Kit - Guid BookmayankdgaurNo ratings yet
- Touche For Arduino Advanced Touch SensingDocument6 pagesTouche For Arduino Advanced Touch SensingRoberto BooteNo ratings yet
- Arduino For Beginners REV2Document32 pagesArduino For Beginners REV2VijayalakshmiNo ratings yet
- Worksheet 3 Quarter 3 Robotics and ElectronicsDocument7 pagesWorksheet 3 Quarter 3 Robotics and ElectronicsRembrant FernandezNo ratings yet
- Arduino Bluetooth Serial Connections I Made ItDocument5 pagesArduino Bluetooth Serial Connections I Made ItGilson BaldoNo ratings yet
- Biofeedback Arduino BasedDocument9 pagesBiofeedback Arduino BasedMarkus DempfleNo ratings yet
- Arduino Kids CourseDocument48 pagesArduino Kids CourseRoland von KurnatowskiNo ratings yet
- Automated Door Lock System Using Arduino: AbstractDocument4 pagesAutomated Door Lock System Using Arduino: AbstractRayane BkrNo ratings yet
- Arduino: The Open Source Electronics Prototyping PlatformDocument21 pagesArduino: The Open Source Electronics Prototyping Platformminhaj mohdNo ratings yet
- Developing The Industrial Internet of Things Course 2 Product Teardown Arduino UNO by Haitam Aouad Idrissi November 7, 2020Document7 pagesDeveloping The Industrial Internet of Things Course 2 Product Teardown Arduino UNO by Haitam Aouad Idrissi November 7, 2020DrArun KaliappanNo ratings yet
- Arduino: Attachinterrupt (Interrupt, Function, Mode)Document2 pagesArduino: Attachinterrupt (Interrupt, Function, Mode)muhaned190No ratings yet
- Bluetooth: ArduinoDocument52 pagesBluetooth: ArduinoHavoc BarathNo ratings yet
- Arduino Essentials - Sample ChapterDocument23 pagesArduino Essentials - Sample ChapterPackt PublishingNo ratings yet
- Arduino GuideDocument39 pagesArduino GuidecuickNo ratings yet
- Arduino: A Beginner's Guide to Arduino ProgrammingFrom EverandArduino: A Beginner's Guide to Arduino ProgrammingRating: 3 out of 5 stars3/5 (1)
- RoboTek Arduino Level 1Document287 pagesRoboTek Arduino Level 1Alliah Pauline Dolor50% (2)
- Iot ReportDocument23 pagesIot Reportshruthika6336No ratings yet
- Arduino by Example - Sample ChapterDocument22 pagesArduino by Example - Sample ChapterPackt Publishing100% (1)
- Smart Car Manual Ultrasonic Obstacle AvoidanceDocument30 pagesSmart Car Manual Ultrasonic Obstacle AvoidanceJens PerssonNo ratings yet
- Exploring Arduino: Tools and Techniques for Engineering WizardryFrom EverandExploring Arduino: Tools and Techniques for Engineering WizardryRating: 4.5 out of 5 stars4.5/5 (5)
- MAJOR REPORT Final (Main Content) - Arduino Based Bag Security SystemDocument64 pagesMAJOR REPORT Final (Main Content) - Arduino Based Bag Security Systemgigatek100% (2)
- Temperature Based Fan Speed Controller: Keywords: Arduino, UNO, LM35 Temperature Sensor, Fan EtcDocument8 pagesTemperature Based Fan Speed Controller: Keywords: Arduino, UNO, LM35 Temperature Sensor, Fan EtcToheebdareNo ratings yet
- Digital AnalogDocument40 pagesDigital AnalogRyan Gelica PadayNo ratings yet
- Physical Arduino UNO: EndpointsDocument50 pagesPhysical Arduino UNO: Endpointssteven678No ratings yet
- Advanced View Arduino Projects List - Use Arduino For Projects-5Document53 pagesAdvanced View Arduino Projects List - Use Arduino For Projects-5Bilal AfzalNo ratings yet
- 19ece101 Introduction To Iot Laboratory Manual: B. Tech - Electronics and Communication EngineeringDocument28 pages19ece101 Introduction To Iot Laboratory Manual: B. Tech - Electronics and Communication EngineeringhsjjwjwNo ratings yet
- Arduino BT Mobile Robot R2.0Document52 pagesArduino BT Mobile Robot R2.0Amir al-HakimNo ratings yet
- Arduino: GEET PATEL (13BEC072) Darp Raithatha (13bec084)Document17 pagesArduino: GEET PATEL (13BEC072) Darp Raithatha (13bec084)Amit MehraNo ratings yet
- Bluetooth Multifunctional Car Type B For ArduinoDocument104 pagesBluetooth Multifunctional Car Type B For Arduinoflorin91100% (1)
- IISER Workshop Part1Document17 pagesIISER Workshop Part1Krishna SattaruNo ratings yet
- Embedded System ProgrammingDocument33 pagesEmbedded System Programmingsuleman idrisNo ratings yet
- EMBEDDED SYSTEM LAB TRAINER Instruction ManualDocument27 pagesEMBEDDED SYSTEM LAB TRAINER Instruction ManualyogeshNo ratings yet
- ELEC5614 2014 Lab 2 - v1b PDFDocument15 pagesELEC5614 2014 Lab 2 - v1b PDFYanwen LeeNo ratings yet
- Arduino and the Way of the Ninja (for Absolute Beginners)From EverandArduino and the Way of the Ninja (for Absolute Beginners)Rating: 1 out of 5 stars1/5 (2)
- Arduino-Based Handheld Simon Game - Arduino-Based-Handheld-Simon-GameDocument63 pagesArduino-Based Handheld Simon Game - Arduino-Based-Handheld-Simon-Gameeneas.baroneNo ratings yet
- Dynapac sd2550cs en 20210707 171109Document2 pagesDynapac sd2550cs en 20210707 171109AliNo ratings yet
- Dynapac Screeds: V240 / V3500 / V5100 / V6000 / R300Document16 pagesDynapac Screeds: V240 / V3500 / V5100 / V6000 / R300AliNo ratings yet
- International MaxxForce 15 (All Years) Fault Codes - Imperial Truck GroupDocument8 pagesInternational MaxxForce 15 (All Years) Fault Codes - Imperial Truck GroupAliNo ratings yet
- Infobroschuere FeederDocument12 pagesInfobroschuere FeederAliNo ratings yet
- Texas Instruments LM2595S 5.0 NOPB DatasheetDocument30 pagesTexas Instruments LM2595S 5.0 NOPB DatasheetAliNo ratings yet
- Mini-Line Vögele Converter Kit: Installation GuideDocument8 pagesMini-Line Vögele Converter Kit: Installation GuideAliNo ratings yet
- 2020 Price List: CablesDocument13 pages2020 Price List: CablesAliNo ratings yet
- WIDOS en Quick User Guide Online VersionDocument14 pagesWIDOS en Quick User Guide Online VersionAliNo ratings yet
- Arduino - Wire LibraryDocument3 pagesArduino - Wire LibraryAliNo ratings yet
- 105-Dynapac F181CDocument1 page105-Dynapac F181CAliNo ratings yet
- QuattSecure IP StartersetDocument28 pagesQuattSecure IP StartersetAliNo ratings yet
- RFID Based Smart Lock Implementation: Computer Engineering Department, College of Engineering, Al-Iraqia University, IraqDocument5 pagesRFID Based Smart Lock Implementation: Computer Engineering Department, College of Engineering, Al-Iraqia University, IraqAliNo ratings yet
- Parkside Pt360Document72 pagesParkside Pt360AliNo ratings yet
- 5 KW TVS: FeaturesDocument10 pages5 KW TVS: FeaturesAliNo ratings yet
- IO-RO16, IO-RO16-L: I/O Expansion Modules 16 Relay OutputsDocument8 pagesIO-RO16, IO-RO16-L: I/O Expansion Modules 16 Relay OutputsAliNo ratings yet
- Isa-Plan // Precision Resistors: SMV-PW // Size 4723Document3 pagesIsa-Plan // Precision Resistors: SMV-PW // Size 4723AliNo ratings yet
- Open Smart Technology LimitedDocument20 pagesOpen Smart Technology LimitedAliNo ratings yet
- LR Advanced Intelligence Engine DatasheetDocument2 pagesLR Advanced Intelligence Engine DatasheetAliNo ratings yet
- 16 Channel Relay Board 12vDocument4 pages16 Channel Relay Board 12vAliNo ratings yet
- ModulesDocument22 pagesModulesAliNo ratings yet
- 16-Channel Relay Module Board 16 - Channel Relay Module BoardDocument2 pages16-Channel Relay Module Board 16 - Channel Relay Module BoardAliNo ratings yet
- Ai Engine Development For Versal: Olivier Tremois, PHD SW Technical Marketing Ai Engine ToolsDocument30 pagesAi Engine Development For Versal: Olivier Tremois, PHD SW Technical Marketing Ai Engine ToolsAliNo ratings yet
- User Manual: HMC6000A/E (HMC6000A/HMC6000EG/HMC6000ED) Diesel Engine ControllerDocument37 pagesUser Manual: HMC6000A/E (HMC6000A/HMC6000EG/HMC6000ED) Diesel Engine ControllerAli100% (1)
- Datasheet: Engine TypeDocument4 pagesDatasheet: Engine TypeAliNo ratings yet
- Customer Manual 1Document36 pagesCustomer Manual 1AliNo ratings yet
- Kama Diesel Generator Air Cooled Kde 7000eDocument3 pagesKama Diesel Generator Air Cooled Kde 7000eAli80% (5)
- China KDE7000E Generator Set Manufacturers, Suppliers, Factory - KAMADocument3 pagesChina KDE7000E Generator Set Manufacturers, Suppliers, Factory - KAMAAliNo ratings yet
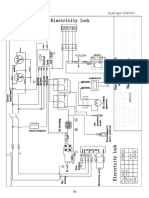
- 7 Circuit Diagram Open Type: DG5000Document1 page7 Circuit Diagram Open Type: DG5000AliNo ratings yet
- IMS Third Assignment PHD CourseworkDocument7 pagesIMS Third Assignment PHD CourseworkragvijNo ratings yet
- Slack Operations Management 6e Chapter1Document7 pagesSlack Operations Management 6e Chapter1dorislianNo ratings yet
- LNG SummitDocument19 pagesLNG SummitRoozbeh PNo ratings yet
- GR 169889 Sps Yap & Guevarra V First E-Bank CorporationDocument7 pagesGR 169889 Sps Yap & Guevarra V First E-Bank CorporationXyriel RaeNo ratings yet
- CSRD March Board in BriefDocument2 pagesCSRD March Board in BriefaimhighsaNo ratings yet
- Tasawwuf: SlamicDocument221 pagesTasawwuf: SlamicMas ThulanNo ratings yet
- Report Project ManagementDocument36 pagesReport Project ManagementVarun Mathur100% (1)
- BIBM PREli GOVT & Private Sumon K. SarkarDocument303 pagesBIBM PREli GOVT & Private Sumon K. SarkarSareoNo ratings yet
- Environmental StandardsDocument14 pagesEnvironmental StandardsJaswant VermaNo ratings yet
- Unit-3 CAD CompletedDocument35 pagesUnit-3 CAD CompletedmuthupuviNo ratings yet
- History of Social CaseworkDocument14 pagesHistory of Social Caseworknirmaljoy60% (5)
- Sixnet Training - OSI ModelDocument16 pagesSixnet Training - OSI ModelBiswajit MohantyNo ratings yet
- Chapter 1 (LMS)Document35 pagesChapter 1 (LMS)Nhân TrịnhNo ratings yet
- 16-00 Richard Tong Squirrel AIDocument25 pages16-00 Richard Tong Squirrel AIMohamed100% (1)
- 20+ Excel Table Tricks To Turbo Charge Your DataDocument21 pages20+ Excel Table Tricks To Turbo Charge Your DataangbohkNo ratings yet
- Flexworks Next Generation Supply PipingDocument4 pagesFlexworks Next Generation Supply Pipingnader0123No ratings yet
- Law Enforcement Organization and AdministrationDocument13 pagesLaw Enforcement Organization and AdministrationMark DayananNo ratings yet
- Building An Organization Capable of Good Strategy Execution: People, Capabilities, and StructureDocument17 pagesBuilding An Organization Capable of Good Strategy Execution: People, Capabilities, and Structuredvlkn88100% (1)
- Dynamic Replication in Data-Centers Connected Over IPFSDocument3 pagesDynamic Replication in Data-Centers Connected Over IPFSNilesh RathiNo ratings yet
- Codigos TV SMK SAM UniversalDocument16 pagesCodigos TV SMK SAM UniversalJeff KbreraNo ratings yet
- Max17126b PDFDocument34 pagesMax17126b PDFedvanps100% (2)
- Paper 1 Question Paper 2022Document28 pagesPaper 1 Question Paper 2022Amaan JamakNo ratings yet
- NSTP 1 - TosDocument2 pagesNSTP 1 - TosTaj NgilayNo ratings yet
- NetstatDocument1 pageNetstatM Faaiq Al AzharNo ratings yet
- The Four QuadrantsDocument20 pagesThe Four QuadrantsTedAdzelanNo ratings yet
- Annual: Lung Center of The PhilippinesDocument97 pagesAnnual: Lung Center of The PhilippinesErine ContranoNo ratings yet
- Case Study Humanized RobotsDocument3 pagesCase Study Humanized RobotsAakash YadavNo ratings yet
- Director Manager Operations Pharmacy in Los Angeles CA Resume Philip HoDocument2 pagesDirector Manager Operations Pharmacy in Los Angeles CA Resume Philip HoPhilipHo2No ratings yet