You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Rs11E Maritime English Section 1 Equipment Vocabulary DeckDocument25 pagesRs11E Maritime English Section 1 Equipment Vocabulary DeckMdpn. Salvador0% (1)
- A User'S Guide To The River ThamesDocument44 pagesA User'S Guide To The River Thamessalah cabdulkadirNo ratings yet
- Bernoulli Effect Accidents ShipsDocument14 pagesBernoulli Effect Accidents ShipsshahjadaNo ratings yet
- MooringDocument9 pagesMooringnoraima gacaNo ratings yet
- Aqwa Reference Manual PDFDocument278 pagesAqwa Reference Manual PDFMohamed SaidNo ratings yet
- Summary of Cost Estimation For 10 Ton Bollard Pull Tug Boat: No. Description Quantity Unit Hull Unit Price (BDT)Document26 pagesSummary of Cost Estimation For 10 Ton Bollard Pull Tug Boat: No. Description Quantity Unit Hull Unit Price (BDT)Masum MahdyNo ratings yet
- A Nonlinear Restoring Effect Study of Mooring System and Its Application by Jian ZhangDocument9 pagesA Nonlinear Restoring Effect Study of Mooring System and Its Application by Jian ZhangTeuku Rachmattra ArvisaNo ratings yet
- Bollards BrochureDocument44 pagesBollards Brochure8fsv8vpt84No ratings yet
- Ur A2 Rev3 Cor1 pdf2425Document6 pagesUr A2 Rev3 Cor1 pdf2425Ahmed MagdyNo ratings yet
- Imrray Suplement Italian Pilot WaterDocument7 pagesImrray Suplement Italian Pilot WaterSergio GarciaNo ratings yet
- Bridon BrochureDocument27 pagesBridon Brochuremayankdixit2No ratings yet
- Jetty: Nte RW Ind SDocument16 pagesJetty: Nte RW Ind SAhnaf Nafim ShirajNo ratings yet
- Lewmar V700 Vertical Windlass 65001022 Issue 5: Owner's Installations, Operation & Servicing ManualDocument20 pagesLewmar V700 Vertical Windlass 65001022 Issue 5: Owner's Installations, Operation & Servicing ManualduduleNo ratings yet
- Course: MTEC 102 Period: PRELIM Week: 2 Session: 1 Topic: Procedures For Safe Mooring-Deployment and Monitoring of Moorings For Cargo ShipDocument14 pagesCourse: MTEC 102 Period: PRELIM Week: 2 Session: 1 Topic: Procedures For Safe Mooring-Deployment and Monitoring of Moorings For Cargo ShipMeljorin LayeseNo ratings yet
- II (A) PROCEDURAL MANUAL - MU Rev.01Document2 pagesII (A) PROCEDURAL MANUAL - MU Rev.01Marj ApolinarNo ratings yet
- YANDAN (SEAM5 Final Examination)Document4 pagesYANDAN (SEAM5 Final Examination)Paul Henry PasionNo ratings yet
- Besiktas TrainingDocument4 pagesBesiktas TrainingElder FrancoNo ratings yet
- BS 6349 Part 4 2014Document54 pagesBS 6349 Part 4 2014vojtaNo ratings yet
- Ahmet Cihan Q88Document7 pagesAhmet Cihan Q88esamNo ratings yet
- Report119 - Part2 of 5 InspectionsDocument44 pagesReport119 - Part2 of 5 InspectionshjdNo ratings yet
- Airports, Docks, Harbours & TunnelsDocument10 pagesAirports, Docks, Harbours & TunnelsHARISH KANNANo ratings yet
- Gisman Mooring Buoys v1 Eng 2023-01-1Document16 pagesGisman Mooring Buoys v1 Eng 2023-01-1Mohammed Ramees Chettian ThodiNo ratings yet
- Ship Lay Up Guidelines PDFDocument24 pagesShip Lay Up Guidelines PDFAnonymous XtvvG80zuNo ratings yet
- Optimoor Help TopicsDocument74 pagesOptimoor Help TopicsDiegoNo ratings yet
- TM505001L - Double Bollard Chantiers - Rev DDocument2 pagesTM505001L - Double Bollard Chantiers - Rev DFederico BabichNo ratings yet
- Tow Line Loadings On Ship Mooring FittingsDocument3 pagesTow Line Loadings On Ship Mooring FittingsEmmaNo ratings yet
- Furun Catalouge PDFDocument9 pagesFurun Catalouge PDFdeboline mitraNo ratings yet
- MIM1201.007 MARINE SAFE WORKING PRACTICES, Jan2016Document11 pagesMIM1201.007 MARINE SAFE WORKING PRACTICES, Jan2016Grenoite GrenoiteNo ratings yet
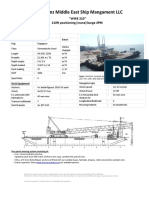
- Allianz Middle East Ship Mangament LLC: "WWE 210" 210ft Positioning (Crane) Barge 4PMDocument2 pagesAllianz Middle East Ship Mangament LLC: "WWE 210" 210ft Positioning (Crane) Barge 4PMCyril J PadiyathNo ratings yet
- ABS GUIDE FOR-Position-Mooring-Systems-2018 - 05Document92 pagesABS GUIDE FOR-Position-Mooring-Systems-2018 - 05jeedanNo ratings yet