You might also like
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- The MenuDocument25 pagesThe MenuShiella Mae Duque100% (1)
- Advantages and Disadvantages of NanotechnologyDocument31 pagesAdvantages and Disadvantages of NanotechnologyMaribel Tan-Losloso Nayad100% (4)
- Wiccan - The Basics of Herbs and Herbal Magic and Spells and MagickDocument5 pagesWiccan - The Basics of Herbs and Herbal Magic and Spells and Magickkhalilgib67% (3)
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"From EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Rating: 2.5 out of 5 stars2.5/5 (2)
- Course Outline MicroeconomicsDocument6 pagesCourse Outline MicroeconomicsMubashir Ali KhanNo ratings yet
- Chapter 2 Systems of Linear EquationsDocument12 pagesChapter 2 Systems of Linear EquationsgladysNo ratings yet
- People of the Philippines vs Leonida Meris y Padilla Joint Decision Convicts Illegal Recruitment EstafaDocument8 pagesPeople of the Philippines vs Leonida Meris y Padilla Joint Decision Convicts Illegal Recruitment Estafarodel_odzNo ratings yet
- Chapter - Iii Linear Algebraic Equations: X X X XDocument13 pagesChapter - Iii Linear Algebraic Equations: X X X XTesfayeNo ratings yet
- Chapter 3 Linear Algebraic EquationsDocument12 pagesChapter 3 Linear Algebraic EquationsyonatanNo ratings yet
- Chapter ThreeDocument13 pagesChapter ThreeHanan ShayiboNo ratings yet
- Lecture01 - Gaussian EliminationDocument27 pagesLecture01 - Gaussian EliminationNa2ryNo ratings yet
- (A K Ray S K Gupta) Mathematical Methods in ChemiDocument28 pages(A K Ray S K Gupta) Mathematical Methods in ChemiKapilSahuNo ratings yet
- Gaussian Elimination TechniquesDocument27 pagesGaussian Elimination TechniquesFahad MahmoodNo ratings yet
- Gauss Elimination SolverDocument21 pagesGauss Elimination SolverkennethmsorianoNo ratings yet
- Gaussian Elimination: Solving Linear EquationsDocument12 pagesGaussian Elimination: Solving Linear EquationsPrincess KaydeeNo ratings yet
- Chapter 3 Lae1Document27 pagesChapter 3 Lae1razlan ghazaliNo ratings yet
- Manual Experiment 1 Part - 2Document3 pagesManual Experiment 1 Part - 2Love IslifeNo ratings yet
- System of Linear EquationsDocument11 pagesSystem of Linear EquationsTrí VũNo ratings yet
- Computational Methods & Statistics MTH 2212: Lecturer DR Zaharah Wahid EXT 4514, ROOM E1-4-8-13Document90 pagesComputational Methods & Statistics MTH 2212: Lecturer DR Zaharah Wahid EXT 4514, ROOM E1-4-8-13asyraaf azharNo ratings yet
- Mws Gen Sle TXT GaussianDocument18 pagesMws Gen Sle TXT GaussianetixastNo ratings yet
- Lab Manual Camp Expt2Document8 pagesLab Manual Camp Expt2Tech GuruNo ratings yet
- Example 1.1.1 (Solving Linear Equations)Document16 pagesExample 1.1.1 (Solving Linear Equations)Happy King NguyenNo ratings yet
- Final PRJCT (Mercy)Document20 pagesFinal PRJCT (Mercy)Hiwot SefiwNo ratings yet
- Topic Numarical Lasd ADocument4 pagesTopic Numarical Lasd AMR.MUSAAB ALMAIDANNo ratings yet
- UntitledDocument4 pagesUntitledMR.MUSAAB ALMAIDANNo ratings yet
- Direct Methods For Solving Linear Equations SystemsDocument15 pagesDirect Methods For Solving Linear Equations Systemspedroquiroga7100% (2)
- Solve Linear Systems Gauss EliminationDocument12 pagesSolve Linear Systems Gauss EliminationPrashantKumarNo ratings yet
- BTLDocument22 pagesBTLBá Phong LêNo ratings yet
- Numerical Methods: Dr. Nasir M MirzaDocument27 pagesNumerical Methods: Dr. Nasir M MirzaarafatasgharNo ratings yet
- Chapter 5Document25 pagesChapter 5Omed. HNo ratings yet
- Augmented Matrix & System of Linear EquationsDocument14 pagesAugmented Matrix & System of Linear EquationsFarid ZamaniNo ratings yet
- 3-1 Gaussian EliminationDocument45 pages3-1 Gaussian EliminationÂn VõNo ratings yet
- Solving Linear Equations with Gaussian EliminationDocument30 pagesSolving Linear Equations with Gaussian EliminationErenNo ratings yet
- Numerical Methods NotesDocument180 pagesNumerical Methods NotesSyed Hasif Sy Mohamad100% (1)
- Techniques of Integrating Rational and Trigonometric FunctionsDocument8 pagesTechniques of Integrating Rational and Trigonometric FunctionsS M AkashNo ratings yet
- JacobiDocument8 pagesJacobiSyed H ShahNo ratings yet
- CSC 431 LECTURE NOTE (Guassian - Method)Document93 pagesCSC 431 LECTURE NOTE (Guassian - Method)Precious OdediranNo ratings yet
- CE304-Unit 3-Lect1-Jumah2018Document15 pagesCE304-Unit 3-Lect1-Jumah2018محمد بركاتNo ratings yet
- Module 7: Systems of Linear Equations in Two or More VariablesDocument6 pagesModule 7: Systems of Linear Equations in Two or More VariablesmoreNo ratings yet
- Lagrange and Newton Interpolation Polynomial ApproximationDocument13 pagesLagrange and Newton Interpolation Polynomial ApproximationCoder DNo ratings yet
- Hacettepe University Department of Environmental EngineeringDocument37 pagesHacettepe University Department of Environmental EngineeringDilan AğkoçNo ratings yet
- Slides For Linear Algebra (Lec 1)Document15 pagesSlides For Linear Algebra (Lec 1)Gubba YasodharNo ratings yet
- Factoring and Solving Polynomial EquationsDocument13 pagesFactoring and Solving Polynomial EquationsMark Francis HernandezNo ratings yet
- Module 1 System of Linear EquationDocument5 pagesModule 1 System of Linear EquationRtwpb Region IINo ratings yet
- Gauss Elimination Mthod KhoirulDocument11 pagesGauss Elimination Mthod KhoirulsupergioNo ratings yet
- Department of Chemical Engineering: Assignment 1 (Solving of Matrices) How To Solve A Matrix EquationDocument4 pagesDepartment of Chemical Engineering: Assignment 1 (Solving of Matrices) How To Solve A Matrix EquationKaushik RaiNo ratings yet
- 04 05 KomFis Gauss EliminationDocument85 pages04 05 KomFis Gauss EliminationalfianisaNo ratings yet
- Integration - Unequal Segments, Multiple Integral and Gauss Quad RuleDocument31 pagesIntegration - Unequal Segments, Multiple Integral and Gauss Quad RulemoatazNo ratings yet
- Systems of EquationsDocument16 pagesSystems of EquationsKames KamesNo ratings yet
- Lecture6-7 (Solution of Linear Equation)Document82 pagesLecture6-7 (Solution of Linear Equation)Rana SKNo ratings yet
- Ma214 S23 Part03Document30 pagesMa214 S23 Part03PrateekNo ratings yet
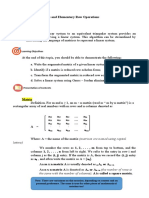
- Module 2 Matrices Elementary Row OperationsDocument14 pagesModule 2 Matrices Elementary Row OperationsRtwpb Region IINo ratings yet
- ES272 ch3bDocument21 pagesES272 ch3btarafe5509No ratings yet
- (A K Ray S K Gupta) Mathematical Methods in ChemiDocument53 pages(A K Ray S K Gupta) Mathematical Methods in ChemiKapilSahuNo ratings yet
- 5.3 Determinants and Cramer's Rule: Unique Solution of A 2 × 2 SystemDocument16 pages5.3 Determinants and Cramer's Rule: Unique Solution of A 2 × 2 SystemParneet PunnNo ratings yet
- Module 2 - Linear - Algebraic - EquationsDocument55 pagesModule 2 - Linear - Algebraic - EquationsMuyambo SàmsøñNo ratings yet
- Solving Linear Equations with Gauss Elimination and Gauss Jordan MethodsDocument6 pagesSolving Linear Equations with Gauss Elimination and Gauss Jordan MethodsMohseen KarcheNo ratings yet
- CH 2 Linear Equations 11Document28 pagesCH 2 Linear Equations 11zhero7No ratings yet
- Gaussian Elimination for Linear EquationsDocument18 pagesGaussian Elimination for Linear EquationsSyahmi RosliNo ratings yet
- DeterminantDocument14 pagesDeterminantNindya SulistyaniNo ratings yet
- Chapter Three Systems of Linear Equations: Dr. Asma AlramleDocument12 pagesChapter Three Systems of Linear Equations: Dr. Asma AlramleRetaj LibyaNo ratings yet
- Linear Algebra BookDocument102 pagesLinear Algebra BookDamián TacuriNo ratings yet
- Example For NumericalDocument9 pagesExample For Numericaltekalign yerangoNo ratings yet
- Dam Outlet Works & Spillways GuideDocument21 pagesDam Outlet Works & Spillways Guidetekalign yerangoNo ratings yet
- Chapter One Basic Numerical MethodsDocument1 pageChapter One Basic Numerical Methodstekalign yerangoNo ratings yet
- Numerical Solution of Ordinary Differential Equations: Chapter-ViDocument4 pagesNumerical Solution of Ordinary Differential Equations: Chapter-Vitekalign yerangoNo ratings yet
- Chapter-V Numerical Differentiation & IntegrationDocument13 pagesChapter-V Numerical Differentiation & Integrationtekalign yerangoNo ratings yet
- Chapter-Ii Roots of Equations: Procedure For Bisection MethodDocument10 pagesChapter-Ii Roots of Equations: Procedure For Bisection Methodtekalign yerangoNo ratings yet
- Hydraulics Chapter 5Document27 pagesHydraulics Chapter 5tekalign yerangoNo ratings yet
- Utilizing Banana Waste for Eco-Friendly GoodsDocument24 pagesUtilizing Banana Waste for Eco-Friendly Goodstekalign yerangoNo ratings yet
- Chapter-Iv Curve FittingDocument17 pagesChapter-Iv Curve Fittingtekalign yerangoNo ratings yet
- Fall Method Used To Determine The Liquid Limit of SoilDocument17 pagesFall Method Used To Determine The Liquid Limit of SoilLuân Nguyễn QuỳnhNo ratings yet
- Hydraulics Chapter 2Document41 pagesHydraulics Chapter 2tekalign yerangoNo ratings yet
- Chapter-1 Mathematical ModellingDocument4 pagesChapter-1 Mathematical Modellingtekalign yerangoNo ratings yet
- Soil Survey Standard Test Method Soil Moisture Content: Department of Sustainable Natural ResourcesDocument5 pagesSoil Survey Standard Test Method Soil Moisture Content: Department of Sustainable Natural ResourcesKhairunniza Azizi KarimNo ratings yet
- Hydraulics-For Civil Engineering-2014/ 2021Document13 pagesHydraulics-For Civil Engineering-2014/ 2021tekalign yerangoNo ratings yet
- GTM 7bDocument26 pagesGTM 7bYiya CamargoNo ratings yet
- Hydraulics Chapter 3Document9 pagesHydraulics Chapter 3tekalign yerangoNo ratings yet
- Experiment Specific GravityDocument7 pagesExperiment Specific Gravitypj_bankNo ratings yet
- Hydraulics Chapter 2Document41 pagesHydraulics Chapter 2tekalign yerangoNo ratings yet
- EARTHWORK FIELD SAMPLING AND TESTINGDocument28 pagesEARTHWORK FIELD SAMPLING AND TESTINGAbd KingNo ratings yet
- Hydraulics Chapter 3Document9 pagesHydraulics Chapter 3tekalign yerangoNo ratings yet
- Hydraulics Chapter 5Document27 pagesHydraulics Chapter 5tekalign yerangoNo ratings yet
- Hydraulics-For Civil Engineering-2014/ 2021Document13 pagesHydraulics-For Civil Engineering-2014/ 2021tekalign yerangoNo ratings yet
- Dengue Fever PresentationDocument11 pagesDengue Fever Presentationhira khanNo ratings yet
- MXTX1012 GX PA00Document28 pagesMXTX1012 GX PA00200880956No ratings yet
- Cost and Quality ManagementDocument8 pagesCost and Quality ManagementRanjini K NairNo ratings yet
- BS 3921-1985 Specification For Clay Bricks PDFDocument31 pagesBS 3921-1985 Specification For Clay Bricks PDFLici001100% (4)
- Schools Division Office of BenguetDocument1 pageSchools Division Office of BenguetAna ConseNo ratings yet
- Course: Basic Technical English Teacher: Lic. Victor Matienzo BustamanteDocument11 pagesCourse: Basic Technical English Teacher: Lic. Victor Matienzo BustamanteSelene FloresNo ratings yet
- LINNINS Et Al v. HAECO AMERICAS, LLC Et Al: Complaint Filed On 5/17/2016Document27 pagesLINNINS Et Al v. HAECO AMERICAS, LLC Et Al: Complaint Filed On 5/17/2016Jeff PetersNo ratings yet
- Smart Security Manager Virtual Matrix: User ManualDocument57 pagesSmart Security Manager Virtual Matrix: User ManualRoldanNo ratings yet
- ChatroomsDocument4 pagesChatroomsAhmad NsNo ratings yet
- Tony'sDocument11 pagesTony'sanna sanaeiNo ratings yet
- Skylab 4 PAO Mission Commentary 16 of 32Document188 pagesSkylab 4 PAO Mission Commentary 16 of 32Bob Andrepont100% (1)
- Income Tax Raids: Procedures and RightsDocument4 pagesIncome Tax Raids: Procedures and RightsshanikaNo ratings yet
- Marketing Assessment Goes ViralDocument8 pagesMarketing Assessment Goes ViralFarsia Binte AlamNo ratings yet
- Introduction of Hris Chapter No.1: Tayyaba IqbalDocument16 pagesIntroduction of Hris Chapter No.1: Tayyaba IqbalmahnooorNo ratings yet
- AIR5022Document23 pagesAIR5022Joanne WNo ratings yet
- May 1217Document48 pagesMay 1217Matt EbrahimiNo ratings yet
- Harvard Referencing GuideDocument73 pagesHarvard Referencing GuideCassidy WilliamsNo ratings yet
- Lease Agreement 2012373Document10 pagesLease Agreement 2012373Patricia WormwoodNo ratings yet
- What Is Automation: Delegation of Human Control Functions To Technical Equipment Aimed Towards AchievingDocument26 pagesWhat Is Automation: Delegation of Human Control Functions To Technical Equipment Aimed Towards AchievingVeeraperumal ArumugamNo ratings yet
- Fundamentals of Cyber Law 2021 t6hzxpREDocument97 pagesFundamentals of Cyber Law 2021 t6hzxpREshivraj satavNo ratings yet
- Data CommunicationDocument2 pagesData CommunicationYzza Veah Esquivel100% (8)
- Updating The Network Controller Server CertificateDocument4 pagesUpdating The Network Controller Server CertificateNavneetMishraNo ratings yet
- Thar Du Kan Calculation Report-13.02.2020 PDFDocument141 pagesThar Du Kan Calculation Report-13.02.2020 PDFZin Ko LinnNo ratings yet
- HRC Couplings: Technical Changes Reserved, Some Items May Not Be Available From Stock. PTI Europa A/S - Pti - EuDocument1 pageHRC Couplings: Technical Changes Reserved, Some Items May Not Be Available From Stock. PTI Europa A/S - Pti - EuVijay BhureNo ratings yet
- Safe Operating Area Testing Without A Heat SinkDocument4 pagesSafe Operating Area Testing Without A Heat SinkCarlos MeloNo ratings yet