You might also like
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Shortest Paths II: Bellman-Ford, Topological Sort, DAG Shortest Paths, Linear Programming, Difference ConstraintsDocument23 pagesShortest Paths II: Bellman-Ford, Topological Sort, DAG Shortest Paths, Linear Programming, Difference ConstraintsYashashavi LadhaNo ratings yet
- Chap 24Document33 pagesChap 24hsohshNo ratings yet
- 24 - Single-Source Shortest PathsDocument55 pages24 - Single-Source Shortest Pathstwzfpdwg6kNo ratings yet
- Alg Lec25 Spt2 PrintDocument3 pagesAlg Lec25 Spt2 PrintsatryabagasNo ratings yet
- Graph-Based Algorithms: CSE373: Design and Analysis of AlgorithmsDocument20 pagesGraph-Based Algorithms: CSE373: Design and Analysis of AlgorithmsAdrian Anam SifaatNo ratings yet
- 12 ApspDocument6 pages12 ApspseemasuranaNo ratings yet
- Weak Formulation of Elliptic Boundary Value Problems: P IIIDocument18 pagesWeak Formulation of Elliptic Boundary Value Problems: P IIIvsanthanamNo ratings yet
- CSE245 - Algorithms: Single Source Shortest Path (Dijkstra's Algorithm)Document39 pagesCSE245 - Algorithms: Single Source Shortest Path (Dijkstra's Algorithm)Md. Sabbir Hossain KhanNo ratings yet
- 05 CME4422 ShortestPathAlgorithmsDocument46 pages05 CME4422 ShortestPathAlgorithmsSAMET KEMAL ÖZDEMİRNo ratings yet
- Bellman FordDocument10 pagesBellman Fordagrawal.anany1005No ratings yet
- Discrete Optimization Lecture Notes 3Document2 pagesDiscrete Optimization Lecture Notes 3BertvdvenNo ratings yet
- Weighted Shortest PathDocument5 pagesWeighted Shortest PathKoka NoodlesNo ratings yet
- CSE 5311 Homework 4 Solution: Problem 22.1-7Document5 pagesCSE 5311 Homework 4 Solution: Problem 22.1-7Prateek RaawatNo ratings yet
- Graph-Based Algorithms: CSE373: Design and Analysis of AlgorithmsDocument16 pagesGraph-Based Algorithms: CSE373: Design and Analysis of AlgorithmsSazedur RahmanNo ratings yet
- Design and Analysis of Algorithms: CSE 5311 Lecture 21 Single-Source Shortest PathsDocument48 pagesDesign and Analysis of Algorithms: CSE 5311 Lecture 21 Single-Source Shortest Pathsshashank dwivediNo ratings yet
- System of Different ConstraintsDocument14 pagesSystem of Different Constraintsnada abdelrahmanNo ratings yet
- Single Source Shortest PathsDocument17 pagesSingle Source Shortest PathsAnukul GangwarNo ratings yet
- Camino Mas CortoDocument17 pagesCamino Mas CortoDiego Muñoz CarrascoNo ratings yet
- GoldbergSlides PDFDocument94 pagesGoldbergSlides PDFM Raihansyah PohanNo ratings yet
- L16 Graph Part05Document32 pagesL16 Graph Part05EnmuskNo ratings yet
- Lect05 Graph Shortest PathDocument7 pagesLect05 Graph Shortest PathAnthony-Dimitri ANo ratings yet
- ECE 476 Power System AnalysisDocument36 pagesECE 476 Power System AnalysisFady MichealNo ratings yet
- Linear Programming: Simplex Method. SolutionDocument5 pagesLinear Programming: Simplex Method. SolutionAnaNo ratings yet
- Student Handout 14 2014Document18 pagesStudent Handout 14 2014kietniNo ratings yet
- Graph Theory Lecture 11 and 12Document37 pagesGraph Theory Lecture 11 and 12Vishnu Kumar Reddy BobbitiNo ratings yet
- 07 Shortest Path AlgorithmsDocument18 pages07 Shortest Path AlgorithmsahmNo ratings yet
- Problem Set #6 Solutions: General NotesDocument9 pagesProblem Set #6 Solutions: General Notesrandomrandom221No ratings yet
- A Compact and Fast Matlab Code Solving The Incompressible Navier-Stokes Equations On Rectangular Domains Mit18086 Navierstokes.mDocument16 pagesA Compact and Fast Matlab Code Solving The Incompressible Navier-Stokes Equations On Rectangular Domains Mit18086 Navierstokes.mhlkatkNo ratings yet
- SolvingtheincompressibleNavierStokesequations PDFDocument16 pagesSolvingtheincompressibleNavierStokesequations PDFTUBA YAQOOBNo ratings yet
- FEM For 2D With MatlabDocument33 pagesFEM For 2D With Matlabammar_harbNo ratings yet
- Dijkstra's Shortest Path Algorithm: Outline of This LectureDocument30 pagesDijkstra's Shortest Path Algorithm: Outline of This LectureHIRAN KUMAR SINHANo ratings yet
- 2 5-ShortestPathDocument53 pages2 5-ShortestPathhung123ka5No ratings yet
- ITCS 6114: Single-Source Shortest PathDocument54 pagesITCS 6114: Single-Source Shortest PathERIC CONDENo ratings yet
- Graph ProblemsDocument2 pagesGraph Problemsaniketgupta3001No ratings yet
- Dynamic Programming: Odds & Ends: T 1 T I I 1Document5 pagesDynamic Programming: Odds & Ends: T 1 T I I 1HIRAN KUMAR SINHANo ratings yet
- Lax Milgram Theorem - Universität BaselDocument23 pagesLax Milgram Theorem - Universität Baselkarthikvs88No ratings yet
- 11 Warshall - Algorithms (Series Lecture)Document41 pages11 Warshall - Algorithms (Series Lecture)turjo987No ratings yet
- MATLAB Code For Solving 2 D Viscous FlowDocument21 pagesMATLAB Code For Solving 2 D Viscous FlowHiếu NguyễnNo ratings yet
- Day1 TutorialDocument7 pagesDay1 TutorialLouis JohnsonNo ratings yet
- Single-Source Shortest PathsDocument43 pagesSingle-Source Shortest PathssamroniNo ratings yet
- Perceptron Learning Algorithm Lecture SupplementDocument6 pagesPerceptron Learning Algorithm Lecture SupplementSinaAstaniNo ratings yet
- Must Seeeeee AnsDocument16 pagesMust Seeeeee AnsNeda'a HamedNo ratings yet
- Fundamental Algorithms, Assignment 13Document2 pagesFundamental Algorithms, Assignment 13Aashish DNo ratings yet
- EN40: Dynamics and Vibrations Homework 3: Solving Equations of Motion For Particles Due Friday Feb 13Document5 pagesEN40: Dynamics and Vibrations Homework 3: Solving Equations of Motion For Particles Due Friday Feb 13Thuy LinhNo ratings yet
- Holder SpacesDocument6 pagesHolder SpacesManuel Argomedo SalirrosasNo ratings yet
- Viscous Fluid FlowDocument48 pagesViscous Fluid FlowTrym Erik Nielsen100% (1)
- MIT18 102s21 Lec3Document5 pagesMIT18 102s21 Lec3vladimirNo ratings yet
- (Assumptions Leading To This?) : Summary of Last LectureDocument23 pages(Assumptions Leading To This?) : Summary of Last Lecturemohammed aliNo ratings yet
- CH12 - 4 - ProjectilesDocument14 pagesCH12 - 4 - ProjectilesKayla T NyakudangaNo ratings yet
- Notes, 6 (B)Document4 pagesNotes, 6 (B)Chan DavidNo ratings yet
- Minimum and Terminal Velocities in Projectile MotionDocument10 pagesMinimum and Terminal Velocities in Projectile MotionSalvador SilveyraNo ratings yet
- FRG 2010 Jin Shi - FHJDocument21 pagesFRG 2010 Jin Shi - FHJCl12No ratings yet
- 18 Shortest Paths IIDocument45 pages18 Shortest Paths IITanmay BaranwalNo ratings yet
- 4 The Orbit Diagram and Transition To ChaosDocument5 pages4 The Orbit Diagram and Transition To ChaosManuel ParraNo ratings yet
- Shortest Paths III: All-Pairs Shortest Paths, Dynamic Programming, Matrix Multiplication, Floyd-Warshall, JohnsonDocument14 pagesShortest Paths III: All-Pairs Shortest Paths, Dynamic Programming, Matrix Multiplication, Floyd-Warshall, JohnsonYashashavi LadhaNo ratings yet
- The Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64From EverandThe Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64No ratings yet
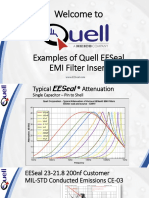
- Examples of Quell's EESeal EMI Filter Inserts - MIL-STD-461 Test ResultsDocument15 pagesExamples of Quell's EESeal EMI Filter Inserts - MIL-STD-461 Test ResultsXto PeregrinNo ratings yet
- Dissolving Clouds With Your MindDocument14 pagesDissolving Clouds With Your MindTamajong Tamajong PhilipNo ratings yet
- 36-217 Fall 2013 HW04Document2 pages36-217 Fall 2013 HW04Gabriel Bernard MullenNo ratings yet
- Happy FinalDocument32 pagesHappy FinalRaju MehtaNo ratings yet
- Active Suspension Using SkyhookDocument14 pagesActive Suspension Using SkyhookSandor CleganeNo ratings yet
- Understanding Work Conditioning and Work Hardening Programs For A Successful RTW 3 13 2014 NovaCare PDFDocument37 pagesUnderstanding Work Conditioning and Work Hardening Programs For A Successful RTW 3 13 2014 NovaCare PDFSitiSarah0% (1)
- Modeling of Deepwater-Type Rectangular Tuned Liquid Damper With Submerged NetsDocument10 pagesModeling of Deepwater-Type Rectangular Tuned Liquid Damper With Submerged NetsDhirendra Kumar PandeyNo ratings yet
- Space Lab 1Document4 pagesSpace Lab 1kael kwanNo ratings yet
- Atex Flow ChartDocument1 pageAtex Flow ChartMohammad KurdiaNo ratings yet
- Planning For Big Data PDFDocument88 pagesPlanning For Big Data PDFexelius100% (1)
- The Context Switch in FreeRTOS On A Cortex MDocument13 pagesThe Context Switch in FreeRTOS On A Cortex MKristof MulierNo ratings yet
- Spss 1. Uji Normalitas Data: One-Sample Kolmogorov-Smirnov TestDocument3 pagesSpss 1. Uji Normalitas Data: One-Sample Kolmogorov-Smirnov Testmustakim gmaNo ratings yet
- Risk Assessment in Shipping CompaniesDocument18 pagesRisk Assessment in Shipping Companiesleopradeep100% (4)
- Georg Lukacs, Art and Objective Truth.Document11 pagesGeorg Lukacs, Art and Objective Truth.Pradeepa Serasinghe0% (1)
- General Manager - Mining / Oil & Gas (Expat)Document4 pagesGeneral Manager - Mining / Oil & Gas (Expat)RajaSyakistNo ratings yet
- The Following Text Is For Questions 1 To 4Document10 pagesThe Following Text Is For Questions 1 To 4Audi Niswa YusfiyaNo ratings yet
- WebSphere Application Server AMI Cheatsheet For DemoDocument2 pagesWebSphere Application Server AMI Cheatsheet For DemoYakura CoffeeNo ratings yet
- Rahul Prakash SalunkeDocument2 pagesRahul Prakash SalunkesalunkerahulNo ratings yet
- Autodesk Navisworks 2012 - Guia Do UsuárioDocument820 pagesAutodesk Navisworks 2012 - Guia Do UsuárioericfgNo ratings yet
- ROBT308Lecture22Spring16 PDFDocument52 pagesROBT308Lecture22Spring16 PDFrightheartedNo ratings yet
- B1 IF-Clauses IF006: WWW - English-Practice - atDocument2 pagesB1 IF-Clauses IF006: WWW - English-Practice - atAyeshaNo ratings yet
- Maximum Remaining - CodeChefDocument3 pagesMaximum Remaining - CodeChefShubhi SinghNo ratings yet
- Ejemplo CFX o Fluent Heat Conduction in A CylinderDocument11 pagesEjemplo CFX o Fluent Heat Conduction in A Cylinderavilaman45No ratings yet
- Morane 4 PFN FffsDocument20 pagesMorane 4 PFN FffsFatmen FataNo ratings yet
- STAT1008 Cheat SheetDocument1 pageSTAT1008 Cheat SheetynottripNo ratings yet
- Holliday - Native SpeakerismDocument3 pagesHolliday - Native SpeakerismDánisaGarderesNo ratings yet
- Kursus Literasi MaklumatDocument5 pagesKursus Literasi MaklumatDanTanNo ratings yet
- Appsc Vro Vra Syllbi51234Document2 pagesAppsc Vro Vra Syllbi51234Mani MalliNo ratings yet
- Graduate Enlistment: DAF 202 - Economics & Social Aspect of DevelopmentDocument43 pagesGraduate Enlistment: DAF 202 - Economics & Social Aspect of DevelopmentJames Ray HjPotter MendajeNo ratings yet
- CS604 - Operating SystemsDocument11 pagesCS604 - Operating SystemsAsadNo ratings yet