You might also like
- 5 Block Diagram Representation of LTI SystemsDocument7 pages5 Block Diagram Representation of LTI SystemsDj OoNo ratings yet
- Modern Control Engineering Systems RepresentationDocument30 pagesModern Control Engineering Systems RepresentationBrooklynPrinceNo ratings yet
- T FN, Pole-Zeros, Block Diagram & SFGDocument28 pagesT FN, Pole-Zeros, Block Diagram & SFGArsal AslamNo ratings yet
- Notes 4Document13 pagesNotes 4lili aboudNo ratings yet
- L4 1st 2nd Order CharacteristicsDocument28 pagesL4 1st 2nd Order Characteristicsalex carterNo ratings yet
- Chapter 3Document37 pagesChapter 3Izzat AiresNo ratings yet
- Control Theory: Germán Andrés Ramos, PHDDocument45 pagesControl Theory: Germán Andrés Ramos, PHDJuan David CarrilloNo ratings yet
- Frequency Response Method (Continue)Document37 pagesFrequency Response Method (Continue)Edo SunardyNo ratings yet
- D-Sampled_systemsDocument16 pagesD-Sampled_systemsbbb bbbNo ratings yet
- Control Engineering MT-353: Block Diagram ReductionDocument38 pagesControl Engineering MT-353: Block Diagram ReductionTahaKhanNo ratings yet
- Topic06 ReviewedDocument4 pagesTopic06 Reviewedsuper junlinNo ratings yet
- SolutionDocument6 pagesSolutionMihir Kumar MechNo ratings yet
- Lecture 2 IIIDocument11 pagesLecture 2 IIIgks5kc8bhdNo ratings yet
- Updated Chapter 2 Control Systems Lecture NotesDocument22 pagesUpdated Chapter 2 Control Systems Lecture Notesvijay rajNo ratings yet
- Transfer FunctionsDocument14 pagesTransfer FunctionsMagNo ratings yet
- Lect 9 Overall Transfer Function of A Closed-Loop Control SystemDocument8 pagesLect 9 Overall Transfer Function of A Closed-Loop Control SystemZaidoon MohsinNo ratings yet
- FOC Lect5 FeedbackDocument16 pagesFOC Lect5 FeedbackErhan ÖZNo ratings yet
- Control 2 Lec4Document13 pagesControl 2 Lec4Ahmed YounisNo ratings yet
- Transfer Functions & Block DiagramsDocument8 pagesTransfer Functions & Block DiagramsHyunjoo MaengNo ratings yet
- Teoría de Control: Hector Villacorta Hector - Villacorta@upa - Edu.mxDocument14 pagesTeoría de Control: Hector Villacorta Hector - Villacorta@upa - Edu.mxdaniela martinezNo ratings yet
- KOM 3781 Discrete-Time Control Systems: Veysel GaziDocument72 pagesKOM 3781 Discrete-Time Control Systems: Veysel GaziFatih CanbolatNo ratings yet
- Ders11 IngDocument16 pagesDers11 IngjgenNo ratings yet
- Review Exercises For Midterm Exam - Semester221Document2 pagesReview Exercises For Midterm Exam - Semester221Kanekii HaiseNo ratings yet
- EE 371 Control Systems Exam II, Spring 1997 Solution: Ee Dept. Univ. of Nevada, RenoDocument3 pagesEE 371 Control Systems Exam II, Spring 1997 Solution: Ee Dept. Univ. of Nevada, RenoAmal AhmedNo ratings yet
- Block Diagram and Signal Flow Graph ReductionDocument27 pagesBlock Diagram and Signal Flow Graph ReductionAbretki FanlherNo ratings yet
- The system is stableDocument48 pagesThe system is stableJulcemar CapellaroNo ratings yet
- Transfer Functions: Dept. of Electrical and Computer Engineering The University of Texas at AustinDocument14 pagesTransfer Functions: Dept. of Electrical and Computer Engineering The University of Texas at Austinrahul rocksNo ratings yet
- Block Diagram Representation of Control SystemsDocument49 pagesBlock Diagram Representation of Control Systemsdanish azhar100% (1)
- Lecture Notes (Dragged)Document1 pageLecture Notes (Dragged)yawas50511No ratings yet
- Lecture Notes (Dragged)Document1 pageLecture Notes (Dragged)yawas50511No ratings yet
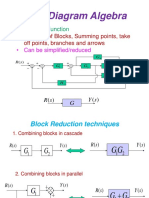
- Block Diagram AlgebraDocument27 pagesBlock Diagram Algebraearnest normanNo ratings yet
- Control SystemsDocument263 pagesControl SystemsrejishkpkdNo ratings yet
- Block Diagram Algebra: Modeling Systems GraphicallyDocument28 pagesBlock Diagram Algebra: Modeling Systems GraphicallySirshenduNo ratings yet
- Linear Control SystemsDocument76 pagesLinear Control SystemsKamran TariqNo ratings yet
- Block Diagram Algebra BasicsDocument15 pagesBlock Diagram Algebra BasicsShubhobrata RudraNo ratings yet
- Tegar Rochmad Oddy Pramanto - Tugas Bab 7 Pengendalian ProsesDocument5 pagesTegar Rochmad Oddy Pramanto - Tugas Bab 7 Pengendalian ProsesTegarRochmad OddyPramantoNo ratings yet
- Lecture 20 Root Locus Introduction and DefinitionDocument21 pagesLecture 20 Root Locus Introduction and DefinitionHamza KhanNo ratings yet
- Chapter3_2Document12 pagesChapter3_2hailegebreselassie24No ratings yet
- Introduction to The Lifting Scheme for Wavelet TransformsDocument15 pagesIntroduction to The Lifting Scheme for Wavelet TransformssreenathgopalNo ratings yet
- EE351Chap3-2.0 - Transfer FTN & SFGsDocument19 pagesEE351Chap3-2.0 - Transfer FTN & SFGsSardar Hamid ullahNo ratings yet
- TUGAS BAB 7 Pengendalian ProsesDocument5 pagesTUGAS BAB 7 Pengendalian ProsesTegarRochmad OddyPramantoNo ratings yet
- Notes 04 - Block ManipulationDocument2 pagesNotes 04 - Block ManipulationMan JaNo ratings yet
- Exercises 05 Block Diagram ReductionDocument3 pagesExercises 05 Block Diagram ReductionKabo MphanyaneNo ratings yet
- 13 - Digital Controller DesignDocument22 pages13 - Digital Controller DesignEverton CollingNo ratings yet
- Block Diagram - TF - Steady State ErrorsDocument93 pagesBlock Diagram - TF - Steady State ErrorsTarek A-RNo ratings yet
- Block Diagram Reduction:: Dr. Qasim Abbas Automatic Control I 6Document5 pagesBlock Diagram Reduction:: Dr. Qasim Abbas Automatic Control I 6علي حسين علاوي ثوينيNo ratings yet
- Lecture 5 Block Diagram Representation of Control Systems PDFDocument60 pagesLecture 5 Block Diagram Representation of Control Systems PDFNicole Anne BorromeoNo ratings yet
- SA2019-20 CHAPTER 1 Block DiagramDocument23 pagesSA2019-20 CHAPTER 1 Block DiagramMohamad Firdaus Ismal Hafis bin Mohd MokhtarNo ratings yet
- Feedback Control Systems (FCS)Document71 pagesFeedback Control Systems (FCS)Ann RazonNo ratings yet
- Lecture Notes (Dragged) 6Document1 pageLecture Notes (Dragged) 6yawas50511No ratings yet
- Algebraic cycles, Chow motives, and L-functions - CommelinDocument39 pagesAlgebraic cycles, Chow motives, and L-functions - Commelinpedroagv08No ratings yet
- Block Diagram AlgebraDocument16 pagesBlock Diagram AlgebraMirwana AirlinesNo ratings yet
- XMPL 421 Sens DistDocument12 pagesXMPL 421 Sens DistSrikrishna JanaNo ratings yet
- Laplace TransformDocument68 pagesLaplace TransformNishat Jahan TarannumNo ratings yet
- Funciones de TransferenciaDocument69 pagesFunciones de TransferenciaAlejandro SanvicenteNo ratings yet
- Transformations Transformations (Calculator)Document11 pagesTransformations Transformations (Calculator)Praggu SwarnkarNo ratings yet
- Frequency ResponseDocument62 pagesFrequency ResponseSujin PrajapatiNo ratings yet
- Block Diagram Reduction MethodsDocument70 pagesBlock Diagram Reduction MethodsMuhammad Ahmad AliNo ratings yet
- EE352L Laboratory Experiment N # 6 Pre-LabDocument2 pagesEE352L Laboratory Experiment N # 6 Pre-LabYassine DjillaliNo ratings yet
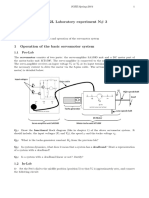
- EE352 Laboratory Experiment N# 2: 1.1 Pre-LabDocument3 pagesEE352 Laboratory Experiment N# 2: 1.1 Pre-LabYassine DjillaliNo ratings yet
- PID Controller Modeling and ExperimentDocument5 pagesPID Controller Modeling and ExperimentYassine DjillaliNo ratings yet
- EE352L Laboratory Experiment N# 3: 1.1 Pre-LabDocument4 pagesEE352L Laboratory Experiment N# 3: 1.1 Pre-LabYassine DjillaliNo ratings yet
- EE352L Laboratory Experiment N# 6 In-LabDocument3 pagesEE352L Laboratory Experiment N# 6 In-LabYassine DjillaliNo ratings yet
- EE352L Laboratory Experiment N # 5 (Pre-Lab)Document2 pagesEE352L Laboratory Experiment N # 5 (Pre-Lab)Yassine DjillaliNo ratings yet
- 4 Steady and Transient State Analog Cascade Compensation: 4.1 PID ControllerDocument3 pages4 Steady and Transient State Analog Cascade Compensation: 4.1 PID ControllerYassine DjillaliNo ratings yet
- E352 Lecture 17: RL cascade compensationDocument6 pagesE352 Lecture 17: RL cascade compensationYassine DjillaliNo ratings yet
- EE352L Experiment N# 1 Objectives: 1.1 Pre-LabDocument3 pagesEE352L Experiment N# 1 Objectives: 1.1 Pre-LabYassine DjillaliNo ratings yet
- 3.4 System Response With Additional Poles: R(S) 0.2 K Y (S)Document3 pages3.4 System Response With Additional Poles: R(S) 0.2 K Y (S)Yassine DjillaliNo ratings yet
- 3 Rules For Sketching The Root Locus K 0Document3 pages3 Rules For Sketching The Root Locus K 0Yassine DjillaliNo ratings yet
- EE352L Laboratory Experiment N# 3: 1.1 Pre-LabDocument4 pagesEE352L Laboratory Experiment N# 3: 1.1 Pre-LabYassine DjillaliNo ratings yet
- Homework #3: Practice Problems: 1.1 Practice QuestionsDocument1 pageHomework #3: Practice Problems: 1.1 Practice QuestionsYassine DjillaliNo ratings yet
- EE352L Laboratory Experiment N # 5 (Pre-Lab)Document2 pagesEE352L Laboratory Experiment N # 5 (Pre-Lab)Yassine DjillaliNo ratings yet
- 3.3 The inverse Laplace transform: 1 2πj σ+j ∞ σ −j∞ stDocument2 pages3.3 The inverse Laplace transform: 1 2πj σ+j ∞ σ −j∞ stYassine DjillaliNo ratings yet
- EE352 Homework 01Document1 pageEE352 Homework 01Amine BenNo ratings yet
- EE451 - Lect 02 - 03Document11 pagesEE451 - Lect 02 - 03Yassine DjillaliNo ratings yet
- Input/output System ModelsDocument4 pagesInput/output System ModelsYassine DjillaliNo ratings yet
- EE352 Lectnote06 SuppDocument1 pageEE352 Lectnote06 SuppYassine DjillaliNo ratings yet
- EE352: Linear Control Systems Syllabus: 1 Course DescriptionDocument2 pagesEE352: Linear Control Systems Syllabus: 1 Course DescriptionYassine DjillaliNo ratings yet
- Introduction To Control SystemsDocument12 pagesIntroduction To Control SystemsYassine DjillaliNo ratings yet
- 2 The Zero-Order Hold and The DAC Model: 2.1 Transfer Function of The ZOHDocument4 pages2 The Zero-Order Hold and The DAC Model: 2.1 Transfer Function of The ZOHYassine DjillaliNo ratings yet
- Modeling of Sampled-Data Control Systems: 1 Ideal Sampling and The ADC ModelDocument5 pagesModeling of Sampled-Data Control Systems: 1 Ideal Sampling and The ADC ModelYassine DjillaliNo ratings yet
- DCS: Instructors and MeetingsDocument19 pagesDCS: Instructors and MeetingsYassine DjillaliNo ratings yet
- EE451: Common Laplace and z-transform signalsDocument1 pageEE451: Common Laplace and z-transform signalsYassine DjillaliNo ratings yet
- .1 Fourier Analysis For CT Signals and SystemsDocument2 pages.1 Fourier Analysis For CT Signals and SystemsYassine DjillaliNo ratings yet
- EE352 Homework 01Document1 pageEE352 Homework 01Amine BenNo ratings yet
- EE451 Lecture 5: Spectral Analysis of SamplingDocument2 pagesEE451 Lecture 5: Spectral Analysis of SamplingYassine DjillaliNo ratings yet
- Pulse-Width Modulation Fundamentals and Applications in Control SystemsDocument4 pagesPulse-Width Modulation Fundamentals and Applications in Control SystemsYassine DjillaliNo ratings yet
- Slide 1 Introduction To ERPDocument29 pagesSlide 1 Introduction To ERPVironica EsterNo ratings yet
- WCAIMLDS Paris 2023 - BrochureDocument8 pagesWCAIMLDS Paris 2023 - Brochuremouna MAYOUFNo ratings yet
- Six Sigma, Lean and Business Process Management (BPM)Document5 pagesSix Sigma, Lean and Business Process Management (BPM)vjeevan5No ratings yet
- Unified ProcessDocument50 pagesUnified ProcessYAWANIKHA THANGAVELNo ratings yet
- Question Bank - ImportantDocument2 pagesQuestion Bank - ImportantAKSHAT ANTALNo ratings yet
- MOBILE POINT OF SALE WITH SMS NOTIFICATION UpdateDocument38 pagesMOBILE POINT OF SALE WITH SMS NOTIFICATION Updatemohamedabdulkadir767No ratings yet
- The Effects of Automation and Artificial Intelligence On Employment and ReskillingDocument5 pagesThe Effects of Automation and Artificial Intelligence On Employment and Reskillingabhijitpaul1544No ratings yet
- Experiment A Self - StudyDocument4 pagesExperiment A Self - StudyShrutiNo ratings yet
- Logistics Manager SuiteDocument10 pagesLogistics Manager SuiteAhmad Subrata WijayaNo ratings yet
- Artificial Intelligence (AI) – Pros & ConsDocument4 pagesArtificial Intelligence (AI) – Pros & ConsAtul BishtNo ratings yet
- Blue Brain Technology: Seminar Topic OnDocument15 pagesBlue Brain Technology: Seminar Topic Onkps ssNo ratings yet
- CorseraDocument6 pagesCorseraGood Deeds50% (2)
- Internship: On PLCDocument12 pagesInternship: On PLCRathan Kumar SM100% (1)
- Mathematics: High-Order Filtered PID Controller Tuning Based On Magnitude OptimumDocument24 pagesMathematics: High-Order Filtered PID Controller Tuning Based On Magnitude Optimumnguyễn công nghĩaNo ratings yet
- Ensemble Based Reservoir ModelingDocument2 pagesEnsemble Based Reservoir ModelingWan Norain Awang LongNo ratings yet
- Introduction To ME 446: Automatic Controls 446 - 1Document4 pagesIntroduction To ME 446: Automatic Controls 446 - 1Francisco HurtadoNo ratings yet
- Cascade Control SE665Document20 pagesCascade Control SE665NurulFarihahMohdZulkefleNo ratings yet
- Cover Letter orDocument1 pageCover Letter orjstpallavNo ratings yet
- Chat GPTDocument13 pagesChat GPTsuly maniyahNo ratings yet
- NEURAL NETWORKS Basics Using MatlabDocument51 pagesNEURAL NETWORKS Basics Using Matlabsreemd100% (2)
- SE Unit1 20IT3302Document20 pagesSE Unit1 20IT3302santhoshkumpatla76No ratings yet
- Automated TestingDocument15 pagesAutomated Testingavinash fayeNo ratings yet
- Machine Learning and Deep LearningDocument11 pagesMachine Learning and Deep Learningsuchitro mandalNo ratings yet
- Visual ModelingDocument6 pagesVisual ModelingAlinordinNo ratings yet
- IB Computer Science IntroDocument10 pagesIB Computer Science IntroClaudia GallardoNo ratings yet
- CIT 6261: Advanced Artificial Intelligence: Course OverviewDocument7 pagesCIT 6261: Advanced Artificial Intelligence: Course OverviewmmahmoudNo ratings yet
- 1021 3308 1 PBDocument6 pages1021 3308 1 PBNguyên Phạm Nguyễn XuânNo ratings yet
- 83 18Document3 pages83 18fatima hassanNo ratings yet
- Marlin Ch13Document44 pagesMarlin Ch13Ashwin Kumar SabatNo ratings yet
- Unit-4 Soft Comp Fuzzy LogicDocument12 pagesUnit-4 Soft Comp Fuzzy LogicSANKEERTH gamerNo ratings yet