You might also like
- Control Systems Formula SheetDocument12 pagesControl Systems Formula SheetliamhrNo ratings yet
- Poulos 2018 Subgrade PDFDocument7 pagesPoulos 2018 Subgrade PDFWeimar Garcia0% (1)
- BT07 BMT17 Seismic Slope Displacement v5Document16 pagesBT07 BMT17 Seismic Slope Displacement v5Ravi SalimathNo ratings yet
- Point and Figure Charts: Why You Should Be Using ThemDocument81 pagesPoint and Figure Charts: Why You Should Be Using ThemSwati Tandon100% (3)
- Ch-5 Time Res WebpageDocument48 pagesCh-5 Time Res WebpageTushar GuptaNo ratings yet
- Unit-Step Response:: 1 First Order SystemsDocument2 pagesUnit-Step Response:: 1 First Order SystemsNatalie ChehraziNo ratings yet
- Composite Optimisation of A Formula One Front WingDocument10 pagesComposite Optimisation of A Formula One Front WingaerostressNo ratings yet
- MA2104 Midterm 18/19Document13 pagesMA2104 Midterm 18/19Robert Fisher100% (1)
- Time Response AnalysisDocument151 pagesTime Response AnalysisTushar GuptaNo ratings yet
- Diff Shortening of Tall Steel Building Columns TaranathDocument8 pagesDiff Shortening of Tall Steel Building Columns TaranathgoggingsNo ratings yet
- Distinct Features of Leadership vs ManagementDocument8 pagesDistinct Features of Leadership vs Managementmukesh.33100% (2)
- Control Systems Lecture04: Transfer Functions and Poles & ZerosDocument53 pagesControl Systems Lecture04: Transfer Functions and Poles & Zerosxtito2No ratings yet
- Lecture-5 Performance of Feedback Control SystemsDocument101 pagesLecture-5 Performance of Feedback Control SystemsHeba FarhatNo ratings yet
- Transient Response Analysis: Test Signals: Impulse Step Ramp Sin And/or CosDocument38 pagesTransient Response Analysis: Test Signals: Impulse Step Ramp Sin And/or Cosomar9aNo ratings yet
- Time: 13:00-15:00 Hrs. Open Book Marks: 100 Attempt All QuestionsDocument5 pagesTime: 13:00-15:00 Hrs. Open Book Marks: 100 Attempt All QuestionsJosé CarlosNo ratings yet
- AME455 - Midterm Exam 02 - 03/11/11Document7 pagesAME455 - Midterm Exam 02 - 03/11/11Cam VintatNo ratings yet
- System ResponseDocument26 pagesSystem ResponsesumanthNo ratings yet
- Chapter 4Document39 pagesChapter 4Joseph IbrahimNo ratings yet
- Assignment 6 SolutionsDocument6 pagesAssignment 6 Solutionsharsh gargNo ratings yet
- System Design 10 - Time Domain AnalysisDocument14 pagesSystem Design 10 - Time Domain AnalysisSanjay RaajNo ratings yet
- Solution Problem 5Document5 pagesSolution Problem 5DeVillersSeciNo ratings yet
- Disturbance Rejection and Noise Attenuation:: Control 1, Second MaterialDocument5 pagesDisturbance Rejection and Noise Attenuation:: Control 1, Second MaterialKaram AlmasriNo ratings yet
- Formula SheetDocument2 pagesFormula SheetBrendanNo ratings yet
- Second-Order System CharacteristicsDocument22 pagesSecond-Order System CharacteristicsNikhil PanikkarNo ratings yet
- Time Response 1Document16 pagesTime Response 1Nik JaffNo ratings yet
- Rogerio Tadeu Santana Junior 7121021301Document30 pagesRogerio Tadeu Santana Junior 7121021301Rogério SantanaNo ratings yet
- Zero DynamicsDocument27 pagesZero DynamicsManash Protim DeoriNo ratings yet
- Differential equation and response of an overdamped second order systemDocument5 pagesDifferential equation and response of an overdamped second order systemabaytekinovicNo ratings yet
- System PrototypesDocument29 pagesSystem PrototypesYgor AguiarNo ratings yet
- Lec 5Document31 pagesLec 5adasdsdadNo ratings yet
- Precision Measurement & Control RevisionDocument8 pagesPrecision Measurement & Control RevisionEleanor McCutcheonNo ratings yet
- Mid Sem SolDocument6 pagesMid Sem SolNeils BohrNo ratings yet
- Stability: Oncept OF TabilityDocument9 pagesStability: Oncept OF TabilityPATEL KRISHNANo ratings yet
- Zeros of The Derivatives of The Riemann Zeta Function On Re S 1/2Document11 pagesZeros of The Derivatives of The Riemann Zeta Function On Re S 1/2Nikos MantzakourasNo ratings yet
- Distribution of Zeros of the Riemann Zeta FunctionDocument6 pagesDistribution of Zeros of the Riemann Zeta FunctionNikos MantzakourasNo ratings yet
- HW1 SolutionsDocument3 pagesHW1 SolutionsMuhammad AbubakerNo ratings yet
- Coupled oscillators normal modesDocument10 pagesCoupled oscillators normal modesapdpjpNo ratings yet
- A Remark On The Existence of Positive Radial Solutions To A Hessian SystemDocument9 pagesA Remark On The Existence of Positive Radial Solutions To A Hessian SystemCovei Dragos-PatruNo ratings yet
- SM212 Practice Test 3, Prof Joyner SolutionsDocument5 pagesSM212 Practice Test 3, Prof Joyner SolutionsHelbert PaatNo ratings yet
- Laplace Transform Solves PDE Boundary Value ProblemDocument8 pagesLaplace Transform Solves PDE Boundary Value ProblemRaymondSanchezNo ratings yet
- t5 PDFDocument16 pagest5 PDFAndy ReynoldsNo ratings yet
- Steady State ErrorsDocument33 pagesSteady State Errorsasma mushtaqNo ratings yet
- MIT8 - 223IAP17 - Lec2 - PLA PreambleDocument11 pagesMIT8 - 223IAP17 - Lec2 - PLA PreambleFERNANDO FLORES DE ANDANo ratings yet
- Physics 7221 Fall 2006: Final Exam: Gabriela Gonz Alez December 14, 2006Document9 pagesPhysics 7221 Fall 2006: Final Exam: Gabriela Gonz Alez December 14, 2006Julian David Henao EscobarNo ratings yet
- CH 02Document42 pagesCH 02Whats UPNo ratings yet
- ACS132/1321 Formula SheetDocument6 pagesACS132/1321 Formula SheetEJAZ AHMADNo ratings yet
- ME430 Final EqSheetDocument1 pageME430 Final EqSheetproverbs308No ratings yet
- Laplace Transform ExamplesDocument5 pagesLaplace Transform ExamplesLeonard PhilipNo ratings yet
- Choosing Lag Length for ADF TestDocument11 pagesChoosing Lag Length for ADF TestBurak Cem BıçkınNo ratings yet
- Lectures 13-14Document23 pagesLectures 13-14vishnu reddyNo ratings yet
- Input - Output - and - State - Space - Models - in Dynamics - Non - Linear - Systems PDFDocument4 pagesInput - Output - and - State - Space - Models - in Dynamics - Non - Linear - Systems PDFIniyan Thiruselvam Navaladi KarthikeyanNo ratings yet
- Channel Impulse Response and Multipath EffectsDocument13 pagesChannel Impulse Response and Multipath EffectsNguyễn ThắngNo ratings yet
- Lab Report #2: KeywordsDocument8 pagesLab Report #2: KeywordsIjaz AhmadNo ratings yet
- Linear Control Systems Time Domain AnalysisDocument22 pagesLinear Control Systems Time Domain AnalysisHoussam moussaNo ratings yet
- Suggested Solution To Past Papers PDFDocument20 pagesSuggested Solution To Past Papers PDFMgla AngelNo ratings yet
- Chapter 4Document23 pagesChapter 4Marwa Ismail KamelNo ratings yet
- 01 Review of Closed Loop ControlDocument17 pages01 Review of Closed Loop ControlferrarivcaNo ratings yet
- 2 ND Order Response Ms DDocument5 pages2 ND Order Response Ms DsyazanaNo ratings yet
- 2ndorderresponseMSD PDFDocument5 pages2ndorderresponseMSD PDFBilly Natansa TariganNo ratings yet
- 2ndorderresponseMSD PDFDocument5 pages2ndorderresponseMSD PDFIshan PatilNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27From EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27No ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- The Plasma Dispersion Function: The Hilbert Transform of the GaussianFrom EverandThe Plasma Dispersion Function: The Hilbert Transform of the GaussianRating: 5 out of 5 stars5/5 (1)
- PID Controller Modeling and ExperimentDocument5 pagesPID Controller Modeling and ExperimentYassine DjillaliNo ratings yet
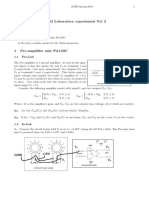
- EE352 Laboratory Experiment N# 2: 1.1 Pre-LabDocument3 pagesEE352 Laboratory Experiment N# 2: 1.1 Pre-LabYassine DjillaliNo ratings yet
- EE352L Laboratory Experiment N# 6 In-LabDocument3 pagesEE352L Laboratory Experiment N# 6 In-LabYassine DjillaliNo ratings yet
- EE352L Laboratory Experiment N# 3: 1.1 Pre-LabDocument4 pagesEE352L Laboratory Experiment N# 3: 1.1 Pre-LabYassine DjillaliNo ratings yet
- EE352L Experiment N# 1 Objectives: 1.1 Pre-LabDocument3 pagesEE352L Experiment N# 1 Objectives: 1.1 Pre-LabYassine DjillaliNo ratings yet
- EE352L Laboratory Experiment N # 5 (Pre-Lab)Document2 pagesEE352L Laboratory Experiment N # 5 (Pre-Lab)Yassine DjillaliNo ratings yet
- 5 Block Diagram Representation of LTI Systems: U (T) G(S) y (T)Document3 pages5 Block Diagram Representation of LTI Systems: U (T) G(S) y (T)Yassine DjillaliNo ratings yet
- 4 Steady and Transient State Analog Cascade Compensation: 4.1 PID ControllerDocument3 pages4 Steady and Transient State Analog Cascade Compensation: 4.1 PID ControllerYassine DjillaliNo ratings yet
- EE352L Laboratory Experiment N # 6 Pre-LabDocument2 pagesEE352L Laboratory Experiment N # 6 Pre-LabYassine DjillaliNo ratings yet
- Homework #3: Practice Problems: 1.1 Practice QuestionsDocument1 pageHomework #3: Practice Problems: 1.1 Practice QuestionsYassine DjillaliNo ratings yet
- E352 Lecture 17: RL cascade compensationDocument6 pagesE352 Lecture 17: RL cascade compensationYassine DjillaliNo ratings yet
- EE352L Laboratory Experiment N# 3: 1.1 Pre-LabDocument4 pagesEE352L Laboratory Experiment N# 3: 1.1 Pre-LabYassine DjillaliNo ratings yet
- EE352: Linear Control Systems Syllabus: 1 Course DescriptionDocument2 pagesEE352: Linear Control Systems Syllabus: 1 Course DescriptionYassine DjillaliNo ratings yet
- EE352L Laboratory Experiment N # 5 (Pre-Lab)Document2 pagesEE352L Laboratory Experiment N # 5 (Pre-Lab)Yassine DjillaliNo ratings yet
- Input/output System ModelsDocument4 pagesInput/output System ModelsYassine DjillaliNo ratings yet
- 3.3 The inverse Laplace transform: 1 2πj σ+j ∞ σ −j∞ stDocument2 pages3.3 The inverse Laplace transform: 1 2πj σ+j ∞ σ −j∞ stYassine DjillaliNo ratings yet
- 3 Rules For Sketching The Root Locus K 0Document3 pages3 Rules For Sketching The Root Locus K 0Yassine DjillaliNo ratings yet
- Modeling of Sampled-Data Control Systems: 1 Ideal Sampling and The ADC ModelDocument5 pagesModeling of Sampled-Data Control Systems: 1 Ideal Sampling and The ADC ModelYassine DjillaliNo ratings yet
- EE352 Lectnote06 SuppDocument1 pageEE352 Lectnote06 SuppYassine DjillaliNo ratings yet
- EE352 Homework 01Document1 pageEE352 Homework 01Amine BenNo ratings yet
- Introduction To Control SystemsDocument12 pagesIntroduction To Control SystemsYassine DjillaliNo ratings yet
- 2 The Zero-Order Hold and The DAC Model: 2.1 Transfer Function of The ZOHDocument4 pages2 The Zero-Order Hold and The DAC Model: 2.1 Transfer Function of The ZOHYassine DjillaliNo ratings yet
- EE352 Homework 01Document1 pageEE352 Homework 01Amine BenNo ratings yet
- EE451: Common Laplace and z-transform signalsDocument1 pageEE451: Common Laplace and z-transform signalsYassine DjillaliNo ratings yet
- EE451 - Lect 02 - 03Document11 pagesEE451 - Lect 02 - 03Yassine DjillaliNo ratings yet
- DCS: Instructors and MeetingsDocument19 pagesDCS: Instructors and MeetingsYassine DjillaliNo ratings yet
- Pulse-Width Modulation Fundamentals and Applications in Control SystemsDocument4 pagesPulse-Width Modulation Fundamentals and Applications in Control SystemsYassine DjillaliNo ratings yet
- .1 Fourier Analysis For CT Signals and SystemsDocument2 pages.1 Fourier Analysis For CT Signals and SystemsYassine DjillaliNo ratings yet
- EE451 Lecture 5: Spectral Analysis of SamplingDocument2 pagesEE451 Lecture 5: Spectral Analysis of SamplingYassine DjillaliNo ratings yet
- Surendra Kumar MahawarDocument20 pagesSurendra Kumar MahawarROHIT MEENANo ratings yet
- Java Placement QuestionsDocument18 pagesJava Placement QuestionsmeenakshiNo ratings yet
- Ijves Y14 05338Document5 pagesIjves Y14 05338SachinNo ratings yet
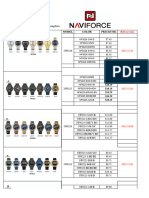
- NAVIFORCE Watch Catalogue in USD - Updated in 20240104Document47 pagesNAVIFORCE Watch Catalogue in USD - Updated in 20240104Perez PerezNo ratings yet
- 03a.magnetism (171 - 201)Document31 pages03a.magnetism (171 - 201)Mupli RajeshNo ratings yet
- ANSYS 10.0 Workbench Tutorial - Description of TutorialsDocument7 pagesANSYS 10.0 Workbench Tutorial - Description of TutorialssangeethsreeniNo ratings yet
- JD Deutsche BankDocument1 pageJD Deutsche BankcompangelNo ratings yet
- RARORDocument8 pagesRARORChinmay ShirsatNo ratings yet
- Plotting Continuous Time Signals in MATLABDocument27 pagesPlotting Continuous Time Signals in MATLABZiYAD AhmadNo ratings yet
- FE Analysis of FoundationsDocument17 pagesFE Analysis of FoundationsdarealboyNo ratings yet
- Assignment 1 of Control EngineeringDocument4 pagesAssignment 1 of Control Engineeringsandeep2506100% (2)
- C Test Questions and Answers PDFDocument15 pagesC Test Questions and Answers PDFVikas Bakoliya100% (1)
- Chap11 20 170 191Document22 pagesChap11 20 170 191Bin SotheaNo ratings yet
- MACM 201 Assignment #3 QuestionsDocument2 pagesMACM 201 Assignment #3 QuestionskateNo ratings yet
- 10 Robotic Filament WindingDocument9 pages10 Robotic Filament WindingYohannes RegassaNo ratings yet
- STATEMENT ASE(3)Document2 pagesSTATEMENT ASE(3)dacianzNo ratings yet
- Linear Aggregation Revisited Rods, Rings and WormsDocument5 pagesLinear Aggregation Revisited Rods, Rings and WormsMikeNo ratings yet
- Marikina Polytechnic College Discrete Math Table of SpecificationDocument1 pageMarikina Polytechnic College Discrete Math Table of Specificationangelic rivera50% (2)
- Practice ProblemsDocument4 pagesPractice ProblemsPalash dasNo ratings yet
- Sains KomputerDocument2 pagesSains KomputerRam KumarNo ratings yet
- "Bureaucracy" and "Rationality" in Weber's Organization TheoryDocument6 pages"Bureaucracy" and "Rationality" in Weber's Organization TheoryAnonymous LGZHCYwNo ratings yet
- 4th PT TLE ICT TDDocument2 pages4th PT TLE ICT TDJeffrey MacalinoNo ratings yet
- Excel CalculusDocument412 pagesExcel Calculusras82362No ratings yet