You might also like
- Control Systems Lecture04: Transfer Functions and Poles & ZerosDocument53 pagesControl Systems Lecture04: Transfer Functions and Poles & Zerosxtito2No ratings yet
- Trigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsFrom EverandTrigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsRating: 5 out of 5 stars5/5 (1)
- Control EnggDocument5 pagesControl EnggRaja KumarNo ratings yet
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesFrom EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesRating: 1.5 out of 5 stars1.5/5 (2)
- 1 Digital Control System Design 1.: Pole Assignment MethodDocument56 pages1 Digital Control System Design 1.: Pole Assignment MethodAmruth ThelkarNo ratings yet
- Zero DynamicsDocument27 pagesZero DynamicsManash Protim DeoriNo ratings yet
- Chapter 2 SolutionsDocument46 pagesChapter 2 SolutionsGulrez MNo ratings yet
- Sample Problems of Control System 2018Document18 pagesSample Problems of Control System 2018anon_463330020No ratings yet
- 1.2 Review On Complex NumbersDocument3 pages1.2 Review On Complex Numbersshriram jadhavNo ratings yet
- Second-Order System CharacteristicsDocument22 pagesSecond-Order System CharacteristicsNikhil PanikkarNo ratings yet
- HW 5 SolDocument10 pagesHW 5 SolPedroNo ratings yet
- Tutorial6 SolDocument4 pagesTutorial6 Soldhindsaharmanjatt2003No ratings yet
- 4 Steady and Transient State Analog Cascade Compensation: 4.1 PID ControllerDocument3 pages4 Steady and Transient State Analog Cascade Compensation: 4.1 PID ControllerYassine DjillaliNo ratings yet
- EE561 Fall2013 Midterm SolDocument5 pagesEE561 Fall2013 Midterm SolzoyosNo ratings yet
- Fisier 11Document5 pagesFisier 11Fleur_de_LuneNo ratings yet
- Proving convergence of a series involving logarithmsDocument5 pagesProving convergence of a series involving logarithmsFleur_de_LuneNo ratings yet
- EEET2197 Tute9 SolnDocument10 pagesEEET2197 Tute9 SolnCollin lcwNo ratings yet
- Week 6 Assignment SolutionDocument7 pagesWeek 6 Assignment SolutionSarthak BhattacharjeeNo ratings yet
- 3.1 3.4 3.5 Buku WeiDocument2 pages3.1 3.4 3.5 Buku WeiMaritaNadyahNo ratings yet
- Midterm I - Version B: 1 2 1.5 3 Log NDocument5 pagesMidterm I - Version B: 1 2 1.5 3 Log NNikhil GuptaNo ratings yet
- LailaDocument2 pagesLailasamiroh63No ratings yet
- Lecture38 PDFDocument5 pagesLecture38 PDFNiyas PNo ratings yet
- Gain and Phase MarginsDocument5 pagesGain and Phase MarginsamitkallerNo ratings yet
- DU KA Special Model Test-01-UniqueSet-0-QuestionEnglish U-02Document7 pagesDU KA Special Model Test-01-UniqueSet-0-QuestionEnglish U-02musfiqurrahman232No ratings yet
- SRJC H2 MATH P2 SolutionDocument17 pagesSRJC H2 MATH P2 SolutionXu Weiyu (Sajc)No ratings yet
- First Exam 18 Dec 2012 Text 1Document6 pagesFirst Exam 18 Dec 2012 Text 1francescoabcNo ratings yet
- Solutions - Cal2 - Midterm S1 - 2122Document2 pagesSolutions - Cal2 - Midterm S1 - 2122Bảo GiaNo ratings yet
- JEE MAIN APNI KAKSHA STAR BATCH ANSWER KEYDocument41 pagesJEE MAIN APNI KAKSHA STAR BATCH ANSWER KEYBhavadip VamjaNo ratings yet
- Chapter 5 HW Solution: Review QuestionsDocument6 pagesChapter 5 HW Solution: Review QuestionslgNo ratings yet
- ME 475 Mechatronics Transfer FunctionDocument28 pagesME 475 Mechatronics Transfer Functionফারহান আহমেদ আবীরNo ratings yet
- Problem 26 from Section 7.3 in StewartDocument3 pagesProblem 26 from Section 7.3 in StewartWill RodríguezNo ratings yet
- Differential equation and response of an overdamped second order systemDocument5 pagesDifferential equation and response of an overdamped second order systemabaytekinovicNo ratings yet
- 63ufrep 13.EC FullSyllabusPaper-II (Solutions)Document42 pages63ufrep 13.EC FullSyllabusPaper-II (Solutions)Saty Prakash YadavNo ratings yet
- Some Properties of The Pseudo-Smarandache FunctionDocument6 pagesSome Properties of The Pseudo-Smarandache FunctionRyanEliasNo ratings yet
- Foca 3Document11 pagesFoca 3jsvarnikachhaviNo ratings yet
- Math 121A: Midterm 1 Solutions: AnswerDocument5 pagesMath 121A: Midterm 1 Solutions: AnswercfisicasterNo ratings yet
- Workbook Workbook Workbook Workbook Workbook: Try Yourself QuestionsDocument26 pagesWorkbook Workbook Workbook Workbook Workbook: Try Yourself QuestionsashutoshsinghjssNo ratings yet
- 9781107059320-SOLUTIONS Essential Digital SolutionsDocument47 pages9781107059320-SOLUTIONS Essential Digital SolutionsGulrez MNo ratings yet
- For The Given System, Do The FollowingDocument13 pagesFor The Given System, Do The FollowingDuy KhánhNo ratings yet
- Transient Response Analysis: Test Signals: Impulse Step Ramp Sin And/or CosDocument38 pagesTransient Response Analysis: Test Signals: Impulse Step Ramp Sin And/or Cosomar9aNo ratings yet
- Midterm 12 SolDocument5 pagesMidterm 12 SolShinee JayasilanNo ratings yet
- EEE 151 Quiz Solutions Magnitude ResponseDocument2 pagesEEE 151 Quiz Solutions Magnitude ResponseChanie RamosNo ratings yet
- Review3Document2 pagesReview3xesef93262No ratings yet
- Direct Design Methods: 1 + + + + + + + + Az Az HZ B BZ BZ Az Az BZ Az ........ ...... ........Document4 pagesDirect Design Methods: 1 + + + + + + + + Az Az HZ B BZ BZ Az Az BZ Az ........ ...... ........Sajid AhmedNo ratings yet
- Notes, 5 (B) : ECE 606 QuicksortDocument5 pagesNotes, 5 (B) : ECE 606 QuicksortChan DavidNo ratings yet
- Inverse functions and trigonometric identities questionsDocument78 pagesInverse functions and trigonometric identities questionsMohammad Fazeel nomaniNo ratings yet
- Maths MCQ PDFDocument78 pagesMaths MCQ PDFPritishNo ratings yet
- 2ndorderresponseMSD PDFDocument5 pages2ndorderresponseMSD PDFVinothNo ratings yet
- 2ndorderresponseMSD PDFDocument5 pages2ndorderresponseMSD PDFBilly Natansa TariganNo ratings yet
- Time Response of Second Order SystemsDocument5 pagesTime Response of Second Order Systemsاحمد حافظNo ratings yet
- 2ndorderresponseMSD PDFDocument5 pages2ndorderresponseMSD PDFIshan PatilNo ratings yet
- 2 ND Order Response Ms DDocument5 pages2 ND Order Response Ms DsyazanaNo ratings yet
- Radial Functions and The Fourier Transform: 1 Area of A SphereDocument4 pagesRadial Functions and The Fourier Transform: 1 Area of A SphereLeonardo BossiNo ratings yet
- Homework #8 SolutionsDocument8 pagesHomework #8 SolutionsChristian EspinozaNo ratings yet
- Curves hw1Document2 pagesCurves hw1Anirudh NairNo ratings yet
- APhO2002 Theory SolDocument18 pagesAPhO2002 Theory SolRahul M-RanjanNo ratings yet
- 3.4 System Response With Additional Poles: R(S) 0.2 K Y (S)Document3 pages3.4 System Response With Additional Poles: R(S) 0.2 K Y (S)Yassine DjillaliNo ratings yet
- Frequency Response For Control System Analysis - GATE Study Material in PDFDocument8 pagesFrequency Response For Control System Analysis - GATE Study Material in PDFnidhi tripathiNo ratings yet
- Michelle Bodnar, Andrew Lohr February 5, 2018Document20 pagesMichelle Bodnar, Andrew Lohr February 5, 2018akshat sinhaNo ratings yet
- 200411_ME685_Homework3Document16 pages200411_ME685_Homework3harsh gargNo ratings yet
- Energy-17Document15 pagesEnergy-17harsh gargNo ratings yet
- Assignment-5Document2 pagesAssignment-5harsh gargNo ratings yet
- Quiz 4 SolutionsDocument8 pagesQuiz 4 Solutionsharsh gargNo ratings yet
- Assignment 3 SolutionsDocument13 pagesAssignment 3 SolutionsRyan ArcherNo ratings yet
- End Sem Y17Document7 pagesEnd Sem Y17harsh gargNo ratings yet
- Assignment 5Document3 pagesAssignment 5harsh gargNo ratings yet
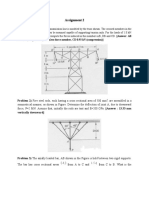
- Transmission Tower Truss ForcesDocument2 pagesTransmission Tower Truss Forcesharsh gargNo ratings yet
- ESO 202A: Mechanics Of Solids Course DetailsDocument2 pagesESO 202A: Mechanics Of Solids Course Detailsharsh gargNo ratings yet
- Equillibrium Polar Through TransformationDocument2 pagesEquillibrium Polar Through Transformationharsh gargNo ratings yet
- Combustion Equilibrium (ME 301ADocument34 pagesCombustion Equilibrium (ME 301Aharsh gargNo ratings yet
- Assignment 2 SolutionDocument8 pagesAssignment 2 Solutionharsh gargNo ratings yet
- AssignmentDocument3 pagesAssignmentharsh gargNo ratings yet
- Lecture 10 Estimation PropertiesDocument7 pagesLecture 10 Estimation Propertiesharsh gargNo ratings yet
- Registration Confirmation: 315VC18331 Aug 24 2009 7:47PM Devashish Chourasiya 24/05/1989 Mechanical RanchiDocument2 pagesRegistration Confirmation: 315VC18331 Aug 24 2009 7:47PM Devashish Chourasiya 24/05/1989 Mechanical Ranchicalculatorfc101No ratings yet
- PHD Thesis - Dalong Zhao-ZnO TFT Thin Film Passivation - Noise Analysis, Hooge ParameterDocument169 pagesPHD Thesis - Dalong Zhao-ZnO TFT Thin Film Passivation - Noise Analysis, Hooge Parameterjiaxin zhangNo ratings yet
- ST5DB Skylake U Platform Block Diagram TitleDocument82 pagesST5DB Skylake U Platform Block Diagram TitleJOSE PAZNo ratings yet
- The Future of Power Systems: Challenges, Trends, and Upcoming ParadigmsDocument16 pagesThe Future of Power Systems: Challenges, Trends, and Upcoming ParadigmsAndres ZuñigaNo ratings yet
- ENGGBOQEstimation ReportDocument266 pagesENGGBOQEstimation ReportUTTAL RAYNo ratings yet
- Other Books NewDocument136 pagesOther Books NewYashRaj ChoudharyNo ratings yet
- Shimano 105 Gear Change ManualDocument1 pageShimano 105 Gear Change Manual1heUndertakerNo ratings yet
- Cegep Linear Algebra ProblemsDocument92 pagesCegep Linear Algebra Problemsham.karimNo ratings yet
- Net CallDocument2 pagesNet CallFerdinand Monte Jr.100% (2)
- VISAYAS STATE UNIVERSITY Soil Science Lab on Rocks and MineralsDocument5 pagesVISAYAS STATE UNIVERSITY Soil Science Lab on Rocks and MineralsAleah TyNo ratings yet
- Autonomy Necessity and Love by Harry FrankfurtDocument14 pagesAutonomy Necessity and Love by Harry FrankfurtjamesdigNo ratings yet
- Babylonian Mathematics (Also Known As Assyro-BabylonianDocument10 pagesBabylonian Mathematics (Also Known As Assyro-BabylonianNirmal BhowmickNo ratings yet
- Syllabus - EU Institutions and Comparative Political System - 2023springDocument10 pagesSyllabus - EU Institutions and Comparative Political System - 2023springreif annieNo ratings yet
- ENG302 Part 2Document7 pagesENG302 Part 2Oğuzhan DalkılıçNo ratings yet
- Lecture 8: Dynamics Characteristics of SCR: Dr. Aadesh Kumar AryaDocument9 pagesLecture 8: Dynamics Characteristics of SCR: Dr. Aadesh Kumar Aryaaadesh kumar aryaNo ratings yet
- Combination Meter: D1 (A), D2 (B)Document10 pagesCombination Meter: D1 (A), D2 (B)PeterNo ratings yet
- Official Statement On Public RelationsDocument1 pageOfficial Statement On Public RelationsAlexandra ZachiNo ratings yet
- Teaching Strategies in The New NormalDocument19 pagesTeaching Strategies in The New NormalEloisa Canlas - Quizon67% (3)
- Limit of Outside Usage Outside Egypt ENDocument1 pageLimit of Outside Usage Outside Egypt ENIbrahem EmamNo ratings yet
- Galvanic CorrosionDocument5 pagesGalvanic Corrosionsatheez3251No ratings yet
- Digital Banking in Vietnam: A Guide To MarketDocument20 pagesDigital Banking in Vietnam: A Guide To MarketTrang PhamNo ratings yet
- Liquid Ring Vacuum Pumps: LPH 75320, LPH 75330, LPH 75340Document10 pagesLiquid Ring Vacuum Pumps: LPH 75320, LPH 75330, LPH 75340pablodugalNo ratings yet
- Assignment 7Document1 pageAssignment 7sujit kcNo ratings yet
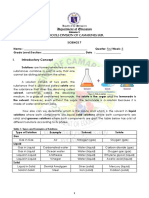
- SCI 7 Q1 WK5 Solutions A LEA TOMASDocument5 pagesSCI 7 Q1 WK5 Solutions A LEA TOMASJoyce CarilloNo ratings yet
- Quality OrientationDocument2 pagesQuality OrientationResearcherNo ratings yet
- Substation Automation HandbookDocument454 pagesSubstation Automation HandbookGiancarloEle100% (6)
- Time May Not Exist - Tim Folger in DiscoverDocument3 pagesTime May Not Exist - Tim Folger in DiscoverTrevor Allen100% (5)
- 10.6 Heat Conduction Through Composite WallsDocument35 pages10.6 Heat Conduction Through Composite WallsEngr Muhammad AqibNo ratings yet
- Driven by Passion. Eager To Grow. If That'S You, Join Bearingpoint!Document15 pagesDriven by Passion. Eager To Grow. If That'S You, Join Bearingpoint!Ana Maria PetreNo ratings yet
- Atma Bodha of Shri SankaracharyaDocument1 pageAtma Bodha of Shri SankaracharyaMerike TazaNo ratings yet