You might also like
- Ymer 230109Document11 pagesYmer 230109Mohamed YagoubNo ratings yet
- Lightweight Fall Detection Algorithm Based On AlphDocument15 pagesLightweight Fall Detection Algorithm Based On AlphSơn Nguyễn HồngNo ratings yet
- Applsci 13 12977Document21 pagesApplsci 13 12977gopineedivigneshNo ratings yet
- Research On Application of Improved YOLO V3 Algorithm in Road Target DetectionDocument10 pagesResearch On Application of Improved YOLO V3 Algorithm in Road Target Detectionikhwancules46No ratings yet
- IJISAE 20 Divya+kumawat 3 1834Document10 pagesIJISAE 20 Divya+kumawat 3 1834Siddesh PingaleNo ratings yet
- Ding 2019 J. Phys. Conf. Ser. 1325 012084Document8 pagesDing 2019 J. Phys. Conf. Ser. 1325 012084MiracleNo ratings yet
- YOLO-ACN Focusing On Small Target and Occluded Object DetectionDocument16 pagesYOLO-ACN Focusing On Small Target and Occluded Object DetectionzugofnNo ratings yet
- Applsci 13 08161Document17 pagesApplsci 13 08161varsha gatlaNo ratings yet
- Processes: Object Detection Algorithm For Surface Defects Based On A Novel Yolov3 ModelDocument18 pagesProcesses: Object Detection Algorithm For Surface Defects Based On A Novel Yolov3 ModelEd swertNo ratings yet
- Object Detection Method Based On YOLOv3 Using - Deep Learning NetworksDocument4 pagesObject Detection Method Based On YOLOv3 Using - Deep Learning NetworksLauraCamilaDuqueNo ratings yet
- Fast YOLO: A Fast You Only Look Once System For Real-Time Embedded Object Detection in VideoDocument3 pagesFast YOLO: A Fast You Only Look Once System For Real-Time Embedded Object Detection in VideoMohd Nurfirdaus Mohd ShamsuriNo ratings yet
- Modified YOLO Module For Efficient Object Tracking in A VideoDocument10 pagesModified YOLO Module For Efficient Object Tracking in A VideoBennish MNo ratings yet
- 2 PDFDocument13 pages2 PDFHouda TàNo ratings yet
- Artificial Intelligence Based Missile Guidance System: Darshan Diwani, Archana Chougule, Debajyoti MukhopadhyayDocument6 pagesArtificial Intelligence Based Missile Guidance System: Darshan Diwani, Archana Chougule, Debajyoti Mukhopadhyayneitan HNo ratings yet
- Li 2023 J. Phys. Conf. Ser. 2560 012001Document8 pagesLi 2023 J. Phys. Conf. Ser. 2560 012001essamabdelhamiedNo ratings yet
- Yolo 5Document9 pagesYolo 5Julio RosalesNo ratings yet
- Improved Vision-Based Vehicle Detection and Classification by Optimized YOLOv4Document14 pagesImproved Vision-Based Vehicle Detection and Classification by Optimized YOLOv4ahammedijas2209118No ratings yet
- Ding 2018 IOP Conf. Ser. Mater. Sci. Eng. 322 062024Document6 pagesDing 2018 IOP Conf. Ser. Mater. Sci. Eng. 322 062024ikhwancules46No ratings yet
- Algorithms 14 00257 v2Document14 pagesAlgorithms 14 00257 v2Selcuk SelcukNo ratings yet
- P - YOLO:, Yolo 3: OLY Higher Speed More Precise Detection and Instance Segmentation For VDocument18 pagesP - YOLO:, Yolo 3: OLY Higher Speed More Precise Detection and Instance Segmentation For VbahiNo ratings yet
- Deep Learning Based Lightweight Radar Target Detection MethodDocument10 pagesDeep Learning Based Lightweight Radar Target Detection MethodhassamaliNo ratings yet
- Anchor-Based Vs Anchor-Free ObjectDocument8 pagesAnchor-Based Vs Anchor-Free Objectsobuz visualNo ratings yet
- Image Classification For Traffic Sign RecognitionDocument6 pagesImage Classification For Traffic Sign RecognitionInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- CR-YOLOv8 Multiscale Object Detection in Traffic Sign ImagesDocument10 pagesCR-YOLOv8 Multiscale Object Detection in Traffic Sign ImagesThe RoobanNo ratings yet
- Du 2019 J. Phys. Conf. Ser. 1314 012202Document7 pagesDu 2019 J. Phys. Conf. Ser. 1314 012202essamabdelhamiedNo ratings yet
- Defect Detection MDPIDocument16 pagesDefect Detection MDPIVladNo ratings yet
- A Literature Review of Object Detection Using YOLOv4 DetectorDocument7 pagesA Literature Review of Object Detection Using YOLOv4 DetectorIJRASETPublicationsNo ratings yet
- Sensors 23 03385Document20 pagesSensors 23 03385eslam foudaNo ratings yet
- MJEER-Volume 30-Issue 1 - Page 52-57Document6 pagesMJEER-Volume 30-Issue 1 - Page 52-57ikhwancules46No ratings yet
- Comparative Analysis of Deep Learning Image Detection AlgorithmsDocument27 pagesComparative Analysis of Deep Learning Image Detection AlgorithmsArin Cantika musiNo ratings yet
- UAV Target Detection Algorithm Based On Improved YOLOv8Document11 pagesUAV Target Detection Algorithm Based On Improved YOLOv8essamabdelhamiedNo ratings yet
- Application of Various YOLO Models For Computer ViDocument14 pagesApplication of Various YOLO Models For Computer ViTrung Trị LêNo ratings yet
- Performance Investigation of Two-Stage Detection Techniques Using Traffic Light Detection DatasetDocument11 pagesPerformance Investigation of Two-Stage Detection Techniques Using Traffic Light Detection DatasetIAES IJAINo ratings yet
- CPaper 12Document6 pagesCPaper 12Sai SidharthNo ratings yet
- Choi Gaussian YOLOv3 An Accurate and Fast Object Detector Using Localization ICCV 2019 PaperDocument10 pagesChoi Gaussian YOLOv3 An Accurate and Fast Object Detector Using Localization ICCV 2019 PaperGayatri KulkarniNo ratings yet
- Symmetry: Improved Yolov4 Marine Target Detection Combined With CbamDocument14 pagesSymmetry: Improved Yolov4 Marine Target Detection Combined With CbamVũ Tâm MinhNo ratings yet
- Real-Time Target Detection System For Animals Based On Self-Attention Improvement and Feature Extraction OptimizationDocument21 pagesReal-Time Target Detection System For Animals Based On Self-Attention Improvement and Feature Extraction OptimizationTeeseryy CoNo ratings yet
- Sensors 23 06423Document23 pagesSensors 23 06423tntautomation01No ratings yet
- Remotesensing 14 05063 v2Document25 pagesRemotesensing 14 05063 v2Yasmine GhazlaneNo ratings yet
- Self Attention Yolov3Document12 pagesSelf Attention Yolov3Anh Nguyễn LanNo ratings yet
- Electronics 12 03664Document21 pagesElectronics 12 036641903237473No ratings yet
- Image Detection and Segmentation Using YOLO v5 ForDocument6 pagesImage Detection and Segmentation Using YOLO v5 ForArin Cantika musiNo ratings yet
- MSFFA-YOLO Network Multiclass Object Detection For Traffic Investigations in Foggy WeatherDocument12 pagesMSFFA-YOLO Network Multiclass Object Detection For Traffic Investigations in Foggy WeatherNanda Azizah Mardotillah45No ratings yet
- 23 IEEE Lung - Nodule - Detection - in - Medical - Images - Based - On - Improved - YOLOv5sDocument17 pages23 IEEE Lung - Nodule - Detection - in - Medical - Images - Based - On - Improved - YOLOv5s20cs068No ratings yet
- Pedestrian Detection System Based On Deep LearningDocument5 pagesPedestrian Detection System Based On Deep LearningInternational Journal of Advances in Applied Sciences (IJAAS)No ratings yet
- Sensors: Deep Learning For Real-Time 3D Multi-Object Detection, Localisation, and Tracking: Application To Smart MobilityDocument15 pagesSensors: Deep Learning For Real-Time 3D Multi-Object Detection, Localisation, and Tracking: Application To Smart MobilityVeeresh AnnigeriNo ratings yet
- Sun 2022 J. Phys. Conf. Ser. 2215 012027Document6 pagesSun 2022 J. Phys. Conf. Ser. 2215 012027essamabdelhamiedNo ratings yet
- Multi-Stream Siamese and Faster Region-Based Neural Network For Real-Time Object TrackingDocument14 pagesMulti-Stream Siamese and Faster Region-Based Neural Network For Real-Time Object TrackingAnanya SinghNo ratings yet
- A Traffic Sign Recognition Method Under Complex Illumination ConditionsDocument12 pagesA Traffic Sign Recognition Method Under Complex Illumination ConditionsEZHILMANI SNo ratings yet
- Vehicle Detection For Accident PreventionDocument7 pagesVehicle Detection For Accident PreventionIJRASETPublicationsNo ratings yet
- Helmet Detection Using Yolo V3 TechniqueDocument4 pagesHelmet Detection Using Yolo V3 TechniqueEditor IJTSRDNo ratings yet
- Tinier YOLODocument10 pagesTinier YOLOMustafa AjiNo ratings yet
- Drones 07 00174 With CoverDocument21 pagesDrones 07 00174 With CovermeenakshiNo ratings yet
- Attention Mechanism Driven Yolov3 On Fpga Acceleration For Efficient Vision Based Defect InspectionDocument5 pagesAttention Mechanism Driven Yolov3 On Fpga Acceleration For Efficient Vision Based Defect InspectionDaniel SouzaNo ratings yet
- Comparison Between YOLO and SSD Mobile Net ForDocument5 pagesComparison Between YOLO and SSD Mobile Net Forweran54885No ratings yet
- Object Detection Algorithm Based On YOLODocument11 pagesObject Detection Algorithm Based On YOLOManny MerazinniNo ratings yet
- The Applications of Machine Learning and Computer Vision Algorithms To Aid People With Vision Impairment.Document16 pagesThe Applications of Machine Learning and Computer Vision Algorithms To Aid People With Vision Impairment.Siddhanth Kheria100% (1)
- Real Time Object Detection With Audio Feedback Using Yolo v3Document4 pagesReal Time Object Detection With Audio Feedback Using Yolo v3Editor IJTSRDNo ratings yet
- Rotational Invariant Object Detection With Yolov3Document9 pagesRotational Invariant Object Detection With Yolov3Mohana Murali DasariNo ratings yet
- Factors Affecting Online Buying BehaviorDocument17 pagesFactors Affecting Online Buying BehaviorJohn DoeNo ratings yet
- Pamphlet On Quality Assurance Planning PSC SleepersDocument6 pagesPamphlet On Quality Assurance Planning PSC SleepersDineshKMPNo ratings yet
- R21 Curriculum EN PDFDocument301 pagesR21 Curriculum EN PDFAdriano Lima da SilvaNo ratings yet
- Year Date Year Date Discharge (M /S) Gauge Height (M) Discharge (M /S) Gauge Height (M)Document3 pagesYear Date Year Date Discharge (M /S) Gauge Height (M) Discharge (M /S) Gauge Height (M)Rajib MaharjanNo ratings yet
- 2020-Biochem-Activity-17 Clinical ChemDocument24 pages2020-Biochem-Activity-17 Clinical ChemGabrielle John HernaezNo ratings yet
- A Social Psychological Study of A Rural Fishing VillageDocument28 pagesA Social Psychological Study of A Rural Fishing VillageΚΟΥΣΑΡΙΔΗΣ ΚΩΝΣΤΑΝΤΙΝΟΣNo ratings yet
- TUV SUD CE Certificate (1500V New Standard)Document3 pagesTUV SUD CE Certificate (1500V New Standard)iszlaitundeNo ratings yet
- D7250D7250M 30432Document7 pagesD7250D7250M 30432darebusi1No ratings yet
- Statement of Account: Date Narration Chq./Ref - No. Value DT Withdrawal Amt. Deposit Amt. Closing BalanceDocument2 pagesStatement of Account: Date Narration Chq./Ref - No. Value DT Withdrawal Amt. Deposit Amt. Closing BalanceLoan LoanNo ratings yet
- The Old Shop Houses As Part of Malaysian Urban Heritage The Current DilemmaDocument18 pagesThe Old Shop Houses As Part of Malaysian Urban Heritage The Current DilemmaBoon Kean100% (1)
- ACCA F9 December 2015 NotesDocument202 pagesACCA F9 December 2015 NotesopentuitionID100% (2)
- HD8Ee3 8x4 GBDocument4 pagesHD8Ee3 8x4 GBMaxim SafonikNo ratings yet
- QP - PDF Class XIth MathsDocument7 pagesQP - PDF Class XIth MathsSivakumar NairNo ratings yet
- Electrical Power Distribution & Utilization EE-359Document36 pagesElectrical Power Distribution & Utilization EE-359MarwaNo ratings yet
- HowToBuildAStockStrategy - Portfolio123Document36 pagesHowToBuildAStockStrategy - Portfolio123life_enjoy50% (2)
- Microwave Decontamination of ConcreteDocument8 pagesMicrowave Decontamination of ConcreteAndres ForeroNo ratings yet
- DM - Basic SPoken ENglishDocument4 pagesDM - Basic SPoken ENglishFeriyanto MuhammadNo ratings yet
- Tungo Sa Bayang Magiliw - 3: Ating Karapatan Sa Batas at Pananagutang PanlipunanDocument25 pagesTungo Sa Bayang Magiliw - 3: Ating Karapatan Sa Batas at Pananagutang PanlipunanAxel GalaNo ratings yet
- Renewable Energy For Sustainable Growth Assessment: EditorsDocument2 pagesRenewable Energy For Sustainable Growth Assessment: EditorsPradeep SinglaNo ratings yet
- Metallurgy, Properties, and Uses of FerrousDocument37 pagesMetallurgy, Properties, and Uses of FerrousAl DrinNo ratings yet
- Syllabus Statistiek 3 UMDocument65 pagesSyllabus Statistiek 3 UMyuripiosikNo ratings yet
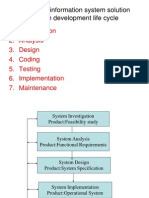
- Developing Information System SolutionDocument42 pagesDeveloping Information System SolutionAbhijeet Mahapatra71% (7)
- FreedomFiler Getting Started v3.1Document16 pagesFreedomFiler Getting Started v3.1pr1asd67% (3)
- Consumer Buying Behavior Toeards Milk ProductDocument54 pagesConsumer Buying Behavior Toeards Milk ProductsuyoganuNo ratings yet
- Legacy Idc Manual Variable Speed 18Document19 pagesLegacy Idc Manual Variable Speed 18TabishNo ratings yet
- Character Personality ClothesDocument3 pagesCharacter Personality ClothesMelania AnghelusNo ratings yet
- Ocean Climate Change EssayDocument2 pagesOcean Climate Change EssayRahmad RivaldiNo ratings yet
- Module 1Document14 pagesModule 1Sungha Jhun0% (1)
- Educational Tour Narrative ReportDocument3 pagesEducational Tour Narrative ReportYhan SombilonNo ratings yet
- Brown Field TNO 0019 RevDocument2 pagesBrown Field TNO 0019 RevDaniele GouveiaNo ratings yet
- Summary of Mustafa Suleyman's The Coming WaveFrom EverandSummary of Mustafa Suleyman's The Coming WaveRating: 5 out of 5 stars5/5 (1)
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldFrom EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldRating: 4.5 out of 5 stars4.5/5 (107)
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveFrom EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNo ratings yet
- Generative AI: The Insights You Need from Harvard Business ReviewFrom EverandGenerative AI: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (3)
- Working with AI: Real Stories of Human-Machine Collaboration (Management on the Cutting Edge)From EverandWorking with AI: Real Stories of Human-Machine Collaboration (Management on the Cutting Edge)Rating: 5 out of 5 stars5/5 (5)
- HBR's 10 Must Reads on AI, Analytics, and the New Machine AgeFrom EverandHBR's 10 Must Reads on AI, Analytics, and the New Machine AgeRating: 4.5 out of 5 stars4.5/5 (69)
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldFrom EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldRating: 4.5 out of 5 stars4.5/5 (55)
- The AI Advantage: How to Put the Artificial Intelligence Revolution to WorkFrom EverandThe AI Advantage: How to Put the Artificial Intelligence Revolution to WorkRating: 4 out of 5 stars4/5 (7)
- Artificial Intelligence & Generative AI for Beginners: The Complete GuideFrom EverandArtificial Intelligence & Generative AI for Beginners: The Complete GuideRating: 5 out of 5 stars5/5 (1)
- Artificial Intelligence: An Executive Guide to Make AI Work for Your BusinessFrom EverandArtificial Intelligence: An Executive Guide to Make AI Work for Your BusinessNo ratings yet
- System Design Interview: 300 Questions And Answers: Prepare And PassFrom EverandSystem Design Interview: 300 Questions And Answers: Prepare And PassNo ratings yet
- Artificial Intelligence: The Insights You Need from Harvard Business ReviewFrom EverandArtificial Intelligence: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (104)
- T-Minus AI: Humanity's Countdown to Artificial Intelligence and the New Pursuit of Global PowerFrom EverandT-Minus AI: Humanity's Countdown to Artificial Intelligence and the New Pursuit of Global PowerRating: 4 out of 5 stars4/5 (4)
- The Roadmap to AI Mastery: A Guide to Building and Scaling ProjectsFrom EverandThe Roadmap to AI Mastery: A Guide to Building and Scaling ProjectsNo ratings yet
- Your AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsFrom EverandYour AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsNo ratings yet
- Mastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)From EverandMastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)No ratings yet
- Artificial Intelligence: A Guide for Thinking HumansFrom EverandArtificial Intelligence: A Guide for Thinking HumansRating: 4.5 out of 5 stars4.5/5 (30)
- MidJourney Magnified: Crafting Visual Magic – The Novice to Pro PlaybookFrom EverandMidJourney Magnified: Crafting Visual Magic – The Novice to Pro PlaybookNo ratings yet
- Our Final Invention: Artificial Intelligence and the End of the Human EraFrom EverandOur Final Invention: Artificial Intelligence and the End of the Human EraRating: 4 out of 5 stars4/5 (82)
- Four Battlegrounds: Power in the Age of Artificial IntelligenceFrom EverandFour Battlegrounds: Power in the Age of Artificial IntelligenceRating: 5 out of 5 stars5/5 (5)
- ChatGPT 4 $10,000 per Month #1 Beginners Guide to Make Money Online Generated by Artificial IntelligenceFrom EverandChatGPT 4 $10,000 per Month #1 Beginners Guide to Make Money Online Generated by Artificial IntelligenceNo ratings yet
- THE FUSION ENERGY EQUATIONS: Unlocking Q40 with AI, Quantum Computing, and the New Energy EconomyFrom EverandTHE FUSION ENERGY EQUATIONS: Unlocking Q40 with AI, Quantum Computing, and the New Energy EconomyNo ratings yet
- Killer ChatGPT Prompts: Harness the Power of AI for Success and ProfitFrom EverandKiller ChatGPT Prompts: Harness the Power of AI for Success and ProfitRating: 2 out of 5 stars2/5 (1)
- Creating Online Courses with ChatGPT | A Step-by-Step Guide with Prompt TemplatesFrom EverandCreating Online Courses with ChatGPT | A Step-by-Step Guide with Prompt TemplatesRating: 4 out of 5 stars4/5 (4)