You might also like
- Energy Regeneration Hydraulic System Via A Relief ValveDocument15 pagesEnergy Regeneration Hydraulic System Via A Relief ValvenqnghiNo ratings yet
- Cavitation-Pump-Pipe-Skid CalcDocument56 pagesCavitation-Pump-Pipe-Skid CalcOltun KAYANo ratings yet
- A Centrifugal Pump Converts The Input Power To Kinetic Energy in The Liquid by Accelerating The Liquid by A Revolving DeviceDocument6 pagesA Centrifugal Pump Converts The Input Power To Kinetic Energy in The Liquid by Accelerating The Liquid by A Revolving DeviceAudrey Patrick KallaNo ratings yet
- A Review of Static Pressure Reset Control in Variable Air Volume Air Condition SystemDocument7 pagesA Review of Static Pressure Reset Control in Variable Air Volume Air Condition SystemAngga FirmansyahNo ratings yet
- Automatic Water Flow ControlDocument18 pagesAutomatic Water Flow ControlssgjmlimNo ratings yet
- Centrifugal Pumps BasicsDocument23 pagesCentrifugal Pumps BasicsalibahcesarayNo ratings yet
- Understanding Centrifugal PumpDocument7 pagesUnderstanding Centrifugal PumpjokishNo ratings yet
- Forging HydraulicDocument15 pagesForging HydraulicManibalanNo ratings yet
- Open Ended Lab Report (Wed G-4)Document9 pagesOpen Ended Lab Report (Wed G-4)Osama RaheelNo ratings yet
- Energy-Efficient Fluid Flow Systems 1Document77 pagesEnergy-Efficient Fluid Flow Systems 1Cristina IsabelNo ratings yet
- M 389 ContentDocument52 pagesM 389 ContentokahertaberNo ratings yet
- M389 Process Pumps, Valves, & Pipe Spreadsheet AnalysisDocument52 pagesM389 Process Pumps, Valves, & Pipe Spreadsheet AnalysisSaidFerdjallahNo ratings yet
- 1.0 Abstracts: Fluid Pressure Pumps TurbinesDocument11 pages1.0 Abstracts: Fluid Pressure Pumps TurbinesZahid ZakariaNo ratings yet
- Improving-Variable-Speed-Pumping-Control ASHRAE ArticleDocument8 pagesImproving-Variable-Speed-Pumping-Control ASHRAE Articlejohnb1978No ratings yet
- A Novel Pumped Hydro Combined With Compressed AirDocument45 pagesA Novel Pumped Hydro Combined With Compressed AirAndy Uc ChiNo ratings yet
- Centrifugal Pump Performance CharacteristicDocument7 pagesCentrifugal Pump Performance CharacteristicOrcraNo ratings yet
- Energy Conservationi N Pumps: M.V.Pande Dy - Director NPTI, NagpurDocument37 pagesEnergy Conservationi N Pumps: M.V.Pande Dy - Director NPTI, NagpurmvpngpNo ratings yet
- EXPERIMENT - 2: Centrifugal Compressor Working: Shaft 2 t2 1 t1 W Shaft 2 t2 1 t1 W 2 t2 1 t1Document2 pagesEXPERIMENT - 2: Centrifugal Compressor Working: Shaft 2 t2 1 t1 W Shaft 2 t2 1 t1 W 2 t2 1 t1Barbie JooNo ratings yet
- Vw1004 Control KosoDocument27 pagesVw1004 Control KosoAnup Mitra100% (1)
- Electricity Production With Zero Emission and Its Distribution To The GridDocument5 pagesElectricity Production With Zero Emission and Its Distribution To The Gridkresimir.mikoc9765No ratings yet
- Analyzing The Performance of Pump Networks Part 1 Basic Theory - CEP MagazineDocument8 pagesAnalyzing The Performance of Pump Networks Part 1 Basic Theory - CEP MagazineMuhammad ImranNo ratings yet
- Theory On The Kaplan Turbne Operation 1Document18 pagesTheory On The Kaplan Turbne Operation 1Anonymous 1VhXp1No ratings yet
- Table of ContentsDocument12 pagesTable of ContentsSyikin FauziNo ratings yet
- Hydraulic ControlDocument18 pagesHydraulic ControlYuhNo ratings yet
- 3 Exp 3. 1st Law Open System-SFEEDocument5 pages3 Exp 3. 1st Law Open System-SFEEinxludezNo ratings yet
- Desalination and Water TreatmentDocument10 pagesDesalination and Water TreatmentAbdou LazregNo ratings yet
- 2000 2 PDFDocument56 pages2000 2 PDFarisandiyusufNo ratings yet
- Pumps in Series and ParallelDocument6 pagesPumps in Series and ParallelSuhadahafiza Shafiee0% (1)
- Esl Ie 05 05 05Document11 pagesEsl Ie 05 05 05blindjaxxNo ratings yet
- VPT-Kalatjari (Sazeh Engineering Consultants)Document16 pagesVPT-Kalatjari (Sazeh Engineering Consultants)cristianNo ratings yet
- Centrifugal Pump Working Principle With DiagramDocument12 pagesCentrifugal Pump Working Principle With Diagramadeel ahmadNo ratings yet
- M 389 ContentDocument52 pagesM 389 ContentwaseemNo ratings yet
- Selection of Centrifugal Pumping EquipmentDocument11 pagesSelection of Centrifugal Pumping Equipmentshahzad32552372No ratings yet
- Comparison of 4 Different Flow Control Methods of Pumps - EEPDocument5 pagesComparison of 4 Different Flow Control Methods of Pumps - EEPnavigareeNo ratings yet
- 06 2014 2138 Man 03Document11 pages06 2014 2138 Man 03MahmoudMaherNo ratings yet
- Vw1004 Control KosoDocument27 pagesVw1004 Control KosolovelycatNo ratings yet
- Piping Excel SheetDocument52 pagesPiping Excel SheetSubrata Mukherjee100% (2)
- 06a PDFDocument27 pages06a PDFGaettan KatambaNo ratings yet
- ERT 205 Lab 5Document14 pagesERT 205 Lab 5Ang Kien HauNo ratings yet
- Chap 5 ThermodynamicsDocument24 pagesChap 5 ThermodynamicsAsmawi Mohd KhailaniNo ratings yet
- Air SysDocument11 pagesAir Syspbhat83No ratings yet
- Centrifugal Pump Affinity Law-BDHDocument14 pagesCentrifugal Pump Affinity Law-BDHMachineryengNo ratings yet
- Valve Model ExpansionDocument8 pagesValve Model Expansionsaeed65No ratings yet
- Flow - Pressure Control in PumpsDocument13 pagesFlow - Pressure Control in PumpssurjitvarmaNo ratings yet
- Pumping TerminologyDocument24 pagesPumping TerminologychandrasencciNo ratings yet
- Int. J. Low-Carbon Tech.-2016-Chen-1-7Document7 pagesInt. J. Low-Carbon Tech.-2016-Chen-1-7nasr305No ratings yet
- Pump SystemsDocument45 pagesPump SystemsJagdip ShethNo ratings yet
- Study of The Centrifugal Pump Efficiency at Throttling and Speed ControlDocument4 pagesStudy of The Centrifugal Pump Efficiency at Throttling and Speed ControlHassan SouleymanNo ratings yet
- Centrifugal PumpDocument9 pagesCentrifugal Pumpasfand12345100% (1)
- SPE 39041 Combined Artificial Lift System - An Innovative ApproachDocument8 pagesSPE 39041 Combined Artificial Lift System - An Innovative ApproachDiana Carolina Figueroa MendezNo ratings yet
- Pump Performance: Study of The Different Factors That Influence JetDocument1 pagePump Performance: Study of The Different Factors That Influence Jetsdsw02No ratings yet
- Centrifugal Pump Performance Characteristics For DDocument6 pagesCentrifugal Pump Performance Characteristics For DPinaki SankarNo ratings yet
- P1 Lab ReportDocument7 pagesP1 Lab ReportElyse Kymberly TeohNo ratings yet
- Diagnosis and Robust Control of Complex Building Central Chilling Systems for Enhanced Energy PerformanceFrom EverandDiagnosis and Robust Control of Complex Building Central Chilling Systems for Enhanced Energy PerformanceNo ratings yet
- How to Select the Right Centrifugal Pump: A Brief Survey of Centrifugal Pump Selection Best PracticesFrom EverandHow to Select the Right Centrifugal Pump: A Brief Survey of Centrifugal Pump Selection Best PracticesRating: 5 out of 5 stars5/5 (1)
- Hydraulics and Pneumatics: A Technician's and Engineer's GuideFrom EverandHydraulics and Pneumatics: A Technician's and Engineer's GuideRating: 4 out of 5 stars4/5 (8)
- Prevention of Actuator Emissions in the Oil and Gas IndustryFrom EverandPrevention of Actuator Emissions in the Oil and Gas IndustryNo ratings yet
- Steel Forgings, Carbon and Alloy, For Pinions, Gears and Shafts For Reduction GearsDocument4 pagesSteel Forgings, Carbon and Alloy, For Pinions, Gears and Shafts For Reduction GearsCarlos JavierNo ratings yet
- E51400 1 06 17 - MiniventileDocument37 pagesE51400 1 06 17 - MiniventilecontrolorNo ratings yet
- Chapter 5: Notes: Drafting and Design Presentation Standards Volume 3: Structural Drafting StandardsDocument25 pagesChapter 5: Notes: Drafting and Design Presentation Standards Volume 3: Structural Drafting StandardsRodrigo MachadoNo ratings yet
- Ansi-Agma 2004-C08-2008 PDFDocument76 pagesAnsi-Agma 2004-C08-2008 PDFDivoneiPaulo100% (3)
- Woodcock 1987Document37 pagesWoodcock 1987Rodrigo MachadoNo ratings yet
- Chapter 5: Notes: Drafting and Design Presentation Standards Volume 3: Structural Drafting StandardsDocument25 pagesChapter 5: Notes: Drafting and Design Presentation Standards Volume 3: Structural Drafting StandardsRodrigo MachadoNo ratings yet
- CF 420A Hammer Mill Instruction Manual: 1. Knowing Your MachineDocument8 pagesCF 420A Hammer Mill Instruction Manual: 1. Knowing Your MachineRodrigo MachadoNo ratings yet
- Petrinetmodellingofindustrialprocessesfroma PIDDocument7 pagesPetrinetmodellingofindustrialprocessesfroma PIDRodrigo MachadoNo ratings yet
- B Dep Piping and Instrument Diagram AppendixDocument69 pagesB Dep Piping and Instrument Diagram AppendixAKSHEYMEHTA87% (15)
- Hydraulic Cylinder Mill Type Series CDH1 / CGH1 / CSH1: RE 17332, Edition: 2021-07, Bosch Rexroth AGDocument84 pagesHydraulic Cylinder Mill Type Series CDH1 / CGH1 / CSH1: RE 17332, Edition: 2021-07, Bosch Rexroth AGRodrigo MachadoNo ratings yet
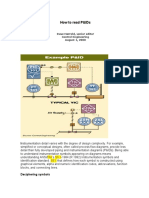
- How To Read P&Ids: Dave Harrold, Senior Editor Control Engineering August 1, 2000Document6 pagesHow To Read P&Ids: Dave Harrold, Senior Editor Control Engineering August 1, 2000Rodrigo MachadoNo ratings yet
- Electrical PN-HYD PDFDocument28 pagesElectrical PN-HYD PDFnoha azamaliNo ratings yet
- TN 87.2.11-1Document193 pagesTN 87.2.11-1Merouane AmraouiNo ratings yet
- Instrumentation Symbols - Con Legend Sheet PDFDocument31 pagesInstrumentation Symbols - Con Legend Sheet PDFdarkchess760% (1)
- Pr8843 - Drawing and Equipment Tag NumberingDocument32 pagesPr8843 - Drawing and Equipment Tag Numberinggalih santosoNo ratings yet
- Pid Legend PDFDocument1 pagePid Legend PDFSocMed Dtk UI0% (1)
- Pampid Instrumentation Documents CompressDocument32 pagesPampid Instrumentation Documents CompressRodrigo MachadoNo ratings yet
- Electrical PN-HYD PDFDocument28 pagesElectrical PN-HYD PDFnoha azamaliNo ratings yet
- Pid Legend PDFDocument1 pagePid Legend PDFSocMed Dtk UI0% (1)
- Re93100 2006-05Document16 pagesRe93100 2006-05Rodrigo MachadoNo ratings yet
- PFD&PID With AUtoCAD P&ID PDFDocument7 pagesPFD&PID With AUtoCAD P&ID PDFihllhmNo ratings yet
- Petrinetmodellingofindustrialprocessesfroma PIDDocument7 pagesPetrinetmodellingofindustrialprocessesfroma PIDRodrigo MachadoNo ratings yet
- DIN-3962-1 - Tolerances For Cylindrical Gear Teeth PDFDocument18 pagesDIN-3962-1 - Tolerances For Cylindrical Gear Teeth PDFjmpateiro1985100% (5)
- Instrumentation Symbols - Con Legend Sheet PDFDocument31 pagesInstrumentation Symbols - Con Legend Sheet PDFdarkchess760% (1)
- Desenho Integradora 3dDocument1 pageDesenho Integradora 3dRodrigo MachadoNo ratings yet
- Din 3961Document12 pagesDin 3961Rodrigo MachadoNo ratings yet
- FiltrosDocument18 pagesFiltrosJulio MezaNo ratings yet
- RE 15302-Wa - 2019-05 - ViewDocument68 pagesRE 15302-Wa - 2019-05 - ViewRodrigo Machado100% (1)
- Aws D14 4 PDFDocument169 pagesAws D14 4 PDFVõ Quang KiệtNo ratings yet
- Experiences of Students On Online LearningDocument24 pagesExperiences of Students On Online LearningcharmaineNo ratings yet
- Advantages and Disadvantages of Distance LearningDocument2 pagesAdvantages and Disadvantages of Distance LearningШвидка Вікторія ТарасівнаNo ratings yet
- Unit 8. New Ways To Learn: Part I. PhoneticsDocument14 pagesUnit 8. New Ways To Learn: Part I. PhoneticsPhạm Gia LợiNo ratings yet
- BTech CS 4th Year SyllabusDocument19 pagesBTech CS 4th Year SyllabusRahul Kumar SInhaNo ratings yet
- Ethical Hacking DissertationDocument5 pagesEthical Hacking DissertationWriteMyPapersUK100% (1)
- Catamsia 9.0 Cara InstallDocument2 pagesCatamsia 9.0 Cara InstalljohnsonNo ratings yet
- Biochips: Submitted byDocument17 pagesBiochips: Submitted byCharina Marie CaduaNo ratings yet
- SM ATF400G-6 - EN - Intern Use OnlyDocument1,767 pagesSM ATF400G-6 - EN - Intern Use OnlyReinaldo Zorrilla88% (8)
- EE314 Lab 1 FinalDocument19 pagesEE314 Lab 1 FinalCarlos BabuNo ratings yet
- Address Lines A0-A7 and Data Lines D0-D7 Are Multiplexed in 8088.Document35 pagesAddress Lines A0-A7 and Data Lines D0-D7 Are Multiplexed in 8088.Mike ThomsonNo ratings yet
- National University: Syllabus Subject: MathematicsDocument3 pagesNational University: Syllabus Subject: MathematicsFathmaakter JuiNo ratings yet
- TW Ebook Product Thinking Playbook Digital2pdfDocument172 pagesTW Ebook Product Thinking Playbook Digital2pdfgermtsNo ratings yet
- Flashattention: Fast and Memory-Efficient Exact Attention With Io-AwarenessDocument34 pagesFlashattention: Fast and Memory-Efficient Exact Attention With Io-AwarenessMarcos CostaNo ratings yet
- E Commerce A Solution To Pakistans Economic WoesDocument27 pagesE Commerce A Solution To Pakistans Economic WoesInciaNo ratings yet
- Schengen Visa Application 2021-11-26Document5 pagesSchengen Visa Application 2021-11-26Edivaldo NehoneNo ratings yet
- DRC-4720 Bridge SensorDocument3 pagesDRC-4720 Bridge SensortedysuNo ratings yet
- 247248-The Histiry and Culture of The Indian People, The Vedic Age Vol I - DjvuDocument620 pages247248-The Histiry and Culture of The Indian People, The Vedic Age Vol I - DjvuDeja ImagenationNo ratings yet
- Reliability and Its Application in TQMDocument15 pagesReliability and Its Application in TQMVijay Anand50% (2)
- Discrete Mathematics - Propositional LogicDocument8 pagesDiscrete Mathematics - Propositional LogicAldrich PanioNo ratings yet
- Tech M Service LetterDocument1 pageTech M Service LetterRahul upadhyayNo ratings yet
- Activity 6Document29 pagesActivity 6Kenneth Puguon0% (1)
- BM3 PlusDocument2 pagesBM3 Pluscicik wijayantiNo ratings yet
- Embase - Other - EmbaseScopusOverview Base de DatosDocument5 pagesEmbase - Other - EmbaseScopusOverview Base de DatosAditya GhoshNo ratings yet
- Lab 521Document8 pagesLab 521Shashitharan PonnambalanNo ratings yet
- Fs Project ReportDocument50 pagesFs Project Reportfizzy thingsNo ratings yet
- 4150 70-37-3 Requirement AnalysisDocument71 pages4150 70-37-3 Requirement AnalysisSreenath SreeNo ratings yet
- Factors Affecting System Complexity: CouplingDocument4 pagesFactors Affecting System Complexity: CouplingJaskirat KaurNo ratings yet
- Chapter 6 Review Questions MCF3M Winter '22Document4 pagesChapter 6 Review Questions MCF3M Winter '22Natalie StockwellNo ratings yet
- Sanam MathDocument13 pagesSanam MathAbrar Ahmed KhanNo ratings yet
- Acropolis Institute of Technology & Research, Indore: BT101 Engg ChemistryDocument6 pagesAcropolis Institute of Technology & Research, Indore: BT101 Engg ChemistryTanmay Jain100% (1)