You might also like
- Champions MindsetDocument48 pagesChampions MindsetDIRECTIA INVATAMINT HINCESTI100% (1)
- Wedding Planning GuideDocument159 pagesWedding Planning GuideRituparna Majumder0% (1)
- Design Thinking ReflectionDocument3 pagesDesign Thinking ReflectionNeil PerlasNo ratings yet
- Introduction To Major Crop FieldsDocument32 pagesIntroduction To Major Crop FieldsCHANDANINo ratings yet
- Complete HSE document kit for ISO 14001 & ISO 45001 certificationDocument8 pagesComplete HSE document kit for ISO 14001 & ISO 45001 certificationfaroz khanNo ratings yet
- New Product Development ProcessDocument29 pagesNew Product Development ProcessGAURAV SHARMA100% (1)
- C Programming in UnixDocument38 pagesC Programming in UnixWatsh Rajneesh80% (5)
- List of Dealers in NoidaDocument240 pagesList of Dealers in NoidaAparna Pande67% (3)
- Lab Guide 1: Instruction Level Parallelism and Matrix MultiplicationDocument3 pagesLab Guide 1: Instruction Level Parallelism and Matrix MultiplicationJoão LourençoNo ratings yet
- Master in High Performance Computing Advanced Parallel Programming LABSDocument2 pagesMaster in High Performance Computing Advanced Parallel Programming LABSnijota1No ratings yet
- Whole Genome ReportDocument16 pagesWhole Genome ReportnhbachNo ratings yet
- 17 Shared MemoryDocument73 pages17 Shared MemoryYuniel Armando González TorresNo ratings yet
- 22 R. A. Kendall Et Al.: 1.3.2 The Openmp ModelDocument4 pages22 R. A. Kendall Et Al.: 1.3.2 The Openmp ModellatinwolfNo ratings yet
- Lab 2: Brief Tutorial On Openmp Programming Model: Adrián Álvarez, Sergi Gil Par4207 2019/2020Document11 pagesLab 2: Brief Tutorial On Openmp Programming Model: Adrián Álvarez, Sergi Gil Par4207 2019/2020Adrián AlvarezNo ratings yet
- Basic C QuestionsDocument48 pagesBasic C QuestionsWilliam McconnellNo ratings yet
- Optimizing C++/Code Optimization/faster Operations: Structure Fields OrderDocument5 pagesOptimizing C++/Code Optimization/faster Operations: Structure Fields OrderTukang UsilNo ratings yet
- Begin Parallel Programming With OpenMP - CodeProjectDocument8 pagesBegin Parallel Programming With OpenMP - CodeProjectManojSudarshanNo ratings yet
- DVCon Europe 2015 TA5 1 PaperDocument7 pagesDVCon Europe 2015 TA5 1 PaperJon DCNo ratings yet
- 1 Parallel Programming Models 29: Fig. 1.16. "Norm of Vector Difference" Openmp Code With A ReductionDocument5 pages1 Parallel Programming Models 29: Fig. 1.16. "Norm of Vector Difference" Openmp Code With A ReductionlatinwolfNo ratings yet
- 18 R. A. Kendall Et Al.: Mpi PutDocument4 pages18 R. A. Kendall Et Al.: Mpi PutlatinwolfNo ratings yet
- Exploiting Loop-Level Parallelism For Simd Arrays Using: OpenmpDocument12 pagesExploiting Loop-Level Parallelism For Simd Arrays Using: OpenmpSpin FotonioNo ratings yet
- Advanced Computer Architecture 1Document14 pagesAdvanced Computer Architecture 1anilbittuNo ratings yet
- Cs4/Msc Parallel Architectures Practical 2 - Cache Coherence ProtocolsDocument5 pagesCs4/Msc Parallel Architectures Practical 2 - Cache Coherence Protocolsbobby123450No ratings yet
- Count 1 bits of parameter n using bitwise operationsDocument6 pagesCount 1 bits of parameter n using bitwise operationsAnkur RastogiNo ratings yet
- Improving Data Locality by ChunkingDocument15 pagesImproving Data Locality by ChunkingSalim MehenniNo ratings yet
- Modular Checking For Buffer Overflows in The LargeDocument10 pagesModular Checking For Buffer Overflows in The LargeRyan CookNo ratings yet
- Tristram FP 443Document6 pagesTristram FP 443sandokanaboliNo ratings yet
- Automatic C Library Wrapping-Ctypes From The TrenchesDocument7 pagesAutomatic C Library Wrapping-Ctypes From The TrenchesbacobacobacoNo ratings yet
- OpenMP1551363136163Document29 pagesOpenMP1551363136163rezaeem373373No ratings yet
- 1.1 Parallelism Is UbiquitousDocument3 pages1.1 Parallelism Is UbiquitousRajinder SanwalNo ratings yet
- HW4: Merge Sort: 1 Assignment GoalDocument6 pagesHW4: Merge Sort: 1 Assignment GoalRafael MendoncaNo ratings yet
- Lab 4Document18 pagesLab 4Vuong PhạmNo ratings yet
- Unit 4 Shared-Memory Parallel Programming With OpenmpDocument37 pagesUnit 4 Shared-Memory Parallel Programming With OpenmpSudha PalaniNo ratings yet
- A Tutorial On Parallel and Concurrent Programming in HaskellDocument40 pagesA Tutorial On Parallel and Concurrent Programming in HaskellNguyễn M.Đức TuânNo ratings yet
- Frequently Asked Questions - AVRDocument18 pagesFrequently Asked Questions - AVRSagar Gupta100% (2)
- Assignment 5: Raw Memory: Bits and BytesDocument6 pagesAssignment 5: Raw Memory: Bits and BytesnikNo ratings yet
- The Design of A Task Parallel Library: Daan Leijen, Wolfram Schulte, and Sebastian BurckhardtDocument15 pagesThe Design of A Task Parallel Library: Daan Leijen, Wolfram Schulte, and Sebastian BurckhardtBogdan NechitaNo ratings yet
- Assignment 1Document2 pagesAssignment 1Samira YomiNo ratings yet
- Models of Computation and Time Complexity: August 3, 2007Document4 pagesModels of Computation and Time Complexity: August 3, 2007vliviuNo ratings yet
- Parallel Regions: ComputeDocument8 pagesParallel Regions: Computepuskesmas sukaweningNo ratings yet
- Ex 3 (Openmp - Iii) : Int Alg - Matmul2d (Int M, Int N, Int P, Float A, Float B, Float C)Document3 pagesEx 3 (Openmp - Iii) : Int Alg - Matmul2d (Int M, Int N, Int P, Float A, Float B, Float C)rahul krishnaNo ratings yet
- Spring 2018 Lab Assignment #4: Understanding Cache Memories Assigned: Apr. 25 Deadline: May 9, 04:59:59 PMDocument10 pagesSpring 2018 Lab Assignment #4: Understanding Cache Memories Assigned: Apr. 25 Deadline: May 9, 04:59:59 PMSohaib ChoudharyNo ratings yet
- Ovn MainDocument54 pagesOvn MainAvenir BajraktariNo ratings yet
- Omp Hands On SC08Document153 pagesOmp Hands On SC08Sreeram KumarNo ratings yet
- Mid Sem QP&SolutionDocument7 pagesMid Sem QP&Solutionyadavsnair000No ratings yet
- CECS 526 - Exercises On Concurrent Processes & Synchronization MechanismsDocument3 pagesCECS 526 - Exercises On Concurrent Processes & Synchronization Mechanismsmurugan18No ratings yet
- Sheet 04Document3 pagesSheet 04eir.gnNo ratings yet
- K Means Clustering Using Openmp: Subject: Operating SystemsDocument12 pagesK Means Clustering Using Openmp: Subject: Operating SystemsThìn NguyễnNo ratings yet
- Parallel Computing Reduces Algorithm Calculation TimeDocument7 pagesParallel Computing Reduces Algorithm Calculation TimeGonzalo Peñaloza PlataNo ratings yet
- 9Document25 pages9Rishab ChoubeyNo ratings yet
- Lab 1Document6 pagesLab 1Phillip ChangNo ratings yet
- Answer:: Answer: The Two Models of Interprocess Communication Are Message-Passing Model andDocument7 pagesAnswer:: Answer: The Two Models of Interprocess Communication Are Message-Passing Model andCao HùngNo ratings yet
- Computer Architecture CT 2 Paper Solution: K M K M K M K M T T) S (MDocument12 pagesComputer Architecture CT 2 Paper Solution: K M K M K M K M T T) S (MNishant AgarwalNo ratings yet
- Why Assembly Language?Document74 pagesWhy Assembly Language?ShivamNo ratings yet
- A Multiway Partitioning Algorithm For Parallel Gate Level Verilog SimulationDocument8 pagesA Multiway Partitioning Algorithm For Parallel Gate Level Verilog SimulationVivek GowdaNo ratings yet
- Laboratory 1 Discrete and Continuous-Time SignalsDocument8 pagesLaboratory 1 Discrete and Continuous-Time SignalsYasitha Kanchana ManathungaNo ratings yet
- MPI, OpenMP and MATLAB Parallel Programming OverviewDocument15 pagesMPI, OpenMP and MATLAB Parallel Programming OverviewWeb devNo ratings yet
- Achieving Predictable Multicore Execution of Automotive Applications Using The LET ParadigmDocument11 pagesAchieving Predictable Multicore Execution of Automotive Applications Using The LET Paradigm天黑黑No ratings yet
- Instruction Costs and Code Optimization Techniques for Compiler DesignDocument6 pagesInstruction Costs and Code Optimization Techniques for Compiler DesignMikeSteveNo ratings yet
- Matlab Some Basics DataDocument4 pagesMatlab Some Basics DatagwodajeNo ratings yet
- Scimakelatex 30610 NoneDocument7 pagesScimakelatex 30610 NoneOne TWoNo ratings yet
- A Tutorial On Parallel and Concurrent Programming in HaskellDocument40 pagesA Tutorial On Parallel and Concurrent Programming in Haskelljase21No ratings yet
- Wrapping C FilesDocument10 pagesWrapping C FilesGabriel AntãoNo ratings yet
- CS2106 Lab 8Document3 pagesCS2106 Lab 8weitsangNo ratings yet
- CC5Document5 pagesCC5Sushant ThiteNo ratings yet
- Python Advanced Programming: The Guide to Learn Python Programming. Reference with Exercises and Samples About Dynamical Programming, Multithreading, Multiprocessing, Debugging, Testing and MoreFrom EverandPython Advanced Programming: The Guide to Learn Python Programming. Reference with Exercises and Samples About Dynamical Programming, Multithreading, Multiprocessing, Debugging, Testing and MoreNo ratings yet
- Au F, R: 4 Domain Decomposition Techniques 137Document4 pagesAu F, R: 4 Domain Decomposition Techniques 137latinwolfNo ratings yet
- 4 Domain Decomposition Techniques 143: A A A ADocument4 pages4 Domain Decomposition Techniques 143: A A A AlatinwolfNo ratings yet
- 4 Domain Decomposition Techniques Agglomeration Coarse OperatorDocument4 pages4 Domain Decomposition Techniques Agglomeration Coarse OperatorlatinwolfNo ratings yet
- 140 L. Formaggia Et Al.: Fig. 4.2. Example of Element-Oriented (Left) and Vertex-Oriented (Right) Decomposition in TheDocument4 pages140 L. Formaggia Et Al.: Fig. 4.2. Example of Element-Oriented (Left) and Vertex-Oriented (Right) Decomposition in ThelatinwolfNo ratings yet
- 152 L. Formaggia Et Al.: Fig. 4.4. Example of Two-Level Decomposition. First Level in Continuous Line, and Second LevelDocument4 pages152 L. Formaggia Et Al.: Fig. 4.4. Example of Two-Level Decomposition. First Level in Continuous Line, and Second LevellatinwolfNo ratings yet
- GPUs for Parallel ComputingDocument4 pagesGPUs for Parallel ComputinglatinwolfNo ratings yet
- Aand B, Which Gets Called Via The GUI, Reads As FollowsDocument5 pagesAand B, Which Gets Called Via The GUI, Reads As FollowslatinwolfNo ratings yet
- Vertex Tests: 124 M. Rumpf and R. StrzodkaDocument4 pagesVertex Tests: 124 M. Rumpf and R. StrzodkalatinwolfNo ratings yet
- 4.3 The Schur Complement System Used As A Preconditioner: × N A by Writing P P IDocument4 pages4.3 The Schur Complement System Used As A Preconditioner: × N A by Writing P P IlatinwolfNo ratings yet
- A 34Document4 pagesA 34latinwolfNo ratings yet
- Finite Element PDE Discretization for Image ProcessingDocument4 pagesFinite Element PDE Discretization for Image ProcessinglatinwolfNo ratings yet
- Table 3.2. The Number of Supported Instructions in The VP and FP For The Different ShaderDocument4 pagesTable 3.2. The Number of Supported Instructions in The VP and FP For The Different ShaderlatinwolfNo ratings yet
- Aand B, Which Gets Called Via The GUI, Reads As FollowsDocument5 pagesAand B, Which Gets Called Via The GUI, Reads As FollowslatinwolfNo ratings yet
- 3 Graphics Processor Units: New Prospects For Parallel Computing 115Document4 pages3 Graphics Processor Units: New Prospects For Parallel Computing 115latinwolfNo ratings yet
- On-The - y Product: Compute Entries of A For Each A V ApplicationDocument4 pagesOn-The - y Product: Compute Entries of A For Each A V ApplicationlatinwolfNo ratings yet
- Pelegrin/scotch/: CotchDocument5 pagesPelegrin/scotch/: CotchlatinwolfNo ratings yet
- Shared Logically Data Object: 1 Parallel Programming Models 41Document5 pagesShared Logically Data Object: 1 Parallel Programming Models 41latinwolfNo ratings yet
- Developer Tools: 118 M. Rumpf and R. StrzodkaDocument4 pagesDeveloper Tools: 118 M. Rumpf and R. StrzodkalatinwolfNo ratings yet
- 1.6 Final Thoughts: 1 Parallel Programming Models 49Document5 pages1.6 Final Thoughts: 1 Parallel Programming Models 49latinwolfNo ratings yet
- A 12Document5 pagesA 12latinwolfNo ratings yet
- Partitioning and Dynamic Load Balancing ReferencesDocument5 pagesPartitioning and Dynamic Load Balancing ReferenceslatinwolfNo ratings yet
- Table 1.3. General Sentinel Syntax of Openmp Directives.: C Code Fragment Fortran Code FragmentDocument4 pagesTable 1.3. General Sentinel Syntax of Openmp Directives.: C Code Fragment Fortran Code FragmentlatinwolfNo ratings yet
- Transparent Operating System Technology - Language-Supported Infrastructure - Variable/array/object-Based LibrariesDocument5 pagesTransparent Operating System Technology - Language-Supported Infrastructure - Variable/array/object-Based LibrarieslatinwolfNo ratings yet
- 1 Parallel Programming Models 29: Fig. 1.16. "Norm of Vector Difference" Openmp Code With A ReductionDocument5 pages1 Parallel Programming Models 29: Fig. 1.16. "Norm of Vector Difference" Openmp Code With A ReductionlatinwolfNo ratings yet
- 18 R. A. Kendall Et Al.: Mpi PutDocument4 pages18 R. A. Kendall Et Al.: Mpi PutlatinwolfNo ratings yet
- Point-to-Point Communication: MPI Send MPI RecvDocument4 pagesPoint-to-Point Communication: MPI Send MPI RecvlatinwolfNo ratings yet
- 2 Partitioning and Dynamic Load Balancing 61: 2.2.1 Geometric MethodsDocument5 pages2 Partitioning and Dynamic Load Balancing 61: 2.2.1 Geometric MethodslatinwolfNo ratings yet
- A 4Document4 pagesA 4latinwolfNo ratings yet
- Excellent Hex Key Wrench: English VersionDocument54 pagesExcellent Hex Key Wrench: English Versionmg pyaeNo ratings yet
- Nimt Institute of Method & Law, Greater Noida: "Legal Bases and Issues in Scrapping Article 370"Document12 pagesNimt Institute of Method & Law, Greater Noida: "Legal Bases and Issues in Scrapping Article 370"Preetish Sahu100% (1)
- Em8 1session2.2Document25 pagesEm8 1session2.2DreamCodmNo ratings yet
- C++ Module 2Document58 pagesC++ Module 2Kaye CariñoNo ratings yet
- Mechanical Seminar ListDocument9 pagesMechanical Seminar ListalokbdasNo ratings yet
- Police Report Hearing RightsDocument7 pagesPolice Report Hearing RightsYatn BangadNo ratings yet
- TD2Document4 pagesTD2Terry ChoiNo ratings yet
- Stenhoj ST40 ST50 ST60 Wiring Diagram T53065 ST40 60 230 400V 50HzDocument21 pagesStenhoj ST40 ST50 ST60 Wiring Diagram T53065 ST40 60 230 400V 50HzLucyan IonescuNo ratings yet
- Artificial IntelligenceDocument4 pagesArtificial IntelligencePrax DNo ratings yet
- Rotating EquipmentDocument3 pagesRotating EquipmentSathish DesignNo ratings yet
- Importance of Communication by ThiruvalluvarDocument7 pagesImportance of Communication by ThiruvalluvarRamavallabhanNo ratings yet
- Equalization of Lithium-Ion Battery Pack Based On Fuzzy Logic Control in Electric VehicleDocument10 pagesEqualization of Lithium-Ion Battery Pack Based On Fuzzy Logic Control in Electric VehicleSureshNo ratings yet
- Crestron Teams HardeningDocument20 pagesCrestron Teams HardeningmanishNo ratings yet
- Nody D 23 01248 PDFDocument70 pagesNody D 23 01248 PDFLegis FloyenNo ratings yet
- Tech Note FormatDocument2 pagesTech Note FormatUgonna OhiriNo ratings yet
- LuisRFlores (lf6225) UTRESUMEDocument3 pagesLuisRFlores (lf6225) UTRESUMELuis Rene FloresNo ratings yet
- Parent DC Promo Ui LogDocument193 pagesParent DC Promo Ui LogRachell SmithNo ratings yet
- Bài tập Toán Cao Cấp - Tập 2 - Nguyễn Đình TríDocument272 pagesBài tập Toán Cao Cấp - Tập 2 - Nguyễn Đình TríMai Anh NguyễnNo ratings yet
- Total Standards: - Total Sub-Standards: - Total ESR StandardsDocument8 pagesTotal Standards: - Total Sub-Standards: - Total ESR StandardsHCX dghhqNo ratings yet
- Instructions To Employee For Submitting Online Application For Transfer Under Rule - 38 of Postal Manual Vol.-IVDocument6 pagesInstructions To Employee For Submitting Online Application For Transfer Under Rule - 38 of Postal Manual Vol.-IVSankarMathi VaigundhamNo ratings yet
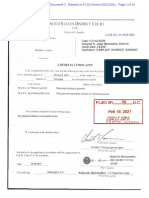
- Lentz Criminal ComplaintDocument16 pagesLentz Criminal ComplaintKristen Faith SchneiderNo ratings yet
- Trimapanel® Brochure PDFDocument36 pagesTrimapanel® Brochure PDFyasserNo ratings yet
- SRX835 Spec Sheet - 11 - 11 - 19Document4 pagesSRX835 Spec Sheet - 11 - 11 - 19Eric PageNo ratings yet