You might also like
- Deimos-2 - Satellite Missions - EoPortal DirectoryDocument22 pagesDeimos-2 - Satellite Missions - EoPortal Directorynab05No ratings yet
- Planning and replanning agile Earth observation satellitesDocument8 pagesPlanning and replanning agile Earth observation satellitesFra LazzoNo ratings yet
- Derivation of Mean Orbital Altitude of A Spacecraft by Use of Optical Imaging TechniquesDocument8 pagesDerivation of Mean Orbital Altitude of A Spacecraft by Use of Optical Imaging TechniquesDunareanu AvraamNo ratings yet
- Image Processing For Near Earth Object Optical Guidance SystemsDocument16 pagesImage Processing For Near Earth Object Optical Guidance SystemsNamith DevadigaNo ratings yet
- 1067.pdf Eighth International Conference On Mars (2014) : Telescope Characteristics. A Trade-Off Exists BeDocument2 pages1067.pdf Eighth International Conference On Mars (2014) : Telescope Characteristics. A Trade-Off Exists BeJunior MirandaNo ratings yet
- Achieving High-Precision Pointing On Exoplanetsat: Initial Feasibility AnalysisDocument16 pagesAchieving High-Precision Pointing On Exoplanetsat: Initial Feasibility AnalysisMatias LipskerNo ratings yet
- Optical Flow Paper181finalDocument7 pagesOptical Flow Paper181finaljohndenningsNo ratings yet
- Cubesat Deformable Mirror Demonstration: CitationDocument12 pagesCubesat Deformable Mirror Demonstration: CitationjonNo ratings yet
- Multidisciplinary Modeling and Design of A Space SystemDocument4 pagesMultidisciplinary Modeling and Design of A Space SystemjtflagNo ratings yet
- Satellite Photogrammetry: Presented By-Sumit Singh (20520010) Sourav Sangam (20520008) Parth Solanki (20520004)Document46 pagesSatellite Photogrammetry: Presented By-Sumit Singh (20520010) Sourav Sangam (20520008) Parth Solanki (20520004)Sourav SangamNo ratings yet
- 2015 MbbazsirsmgcpDocument5 pages2015 MbbazsirsmgcpUsns AbaeNo ratings yet
- Investigation of Malaysian Low Earth Orbits For ReDocument10 pagesInvestigation of Malaysian Low Earth Orbits For Remaudira aNo ratings yet
- Super-Resolution Algorithm For Captured Images by All-Sky SystemDocument9 pagesSuper-Resolution Algorithm For Captured Images by All-Sky SystemInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Autonomous Navigation and Control of A Mars RoverDocument4 pagesAutonomous Navigation and Control of A Mars RoverAfiat KhanNo ratings yet
- Alternative To Feature Matching - High Precision Relative LocalizationDocument7 pagesAlternative To Feature Matching - High Precision Relative LocalizationGaurav VermaNo ratings yet
- PANGU: VIRTUAL SPACECRAFT IMAGE GENERATIONDocument6 pagesPANGU: VIRTUAL SPACECRAFT IMAGE GENERATIONperrot louisNo ratings yet
- Quadcopter With Camera Visual Tracking: March 2015Document3 pagesQuadcopter With Camera Visual Tracking: March 2015Yovi Herlin SaputraNo ratings yet
- Processing CCD Images To Detect Transits of Earth-Sized Planets: Maximizing Sensitivity While Achieving Reasonable Downlink RequirementsDocument12 pagesProcessing CCD Images To Detect Transits of Earth-Sized Planets: Maximizing Sensitivity While Achieving Reasonable Downlink RequirementsSatyam AgrahariNo ratings yet
- Deep Learning for Autonomous Lunar LandingDocument22 pagesDeep Learning for Autonomous Lunar LandingJoel JacobNo ratings yet
- Scalable Trajectory Optimization Based On Bézier CurvesDocument10 pagesScalable Trajectory Optimization Based On Bézier CurvesAnonymous jGOFh2V0hNo ratings yet
- About Team AnantDocument5 pagesAbout Team AnantSANSKRITI JINDALNo ratings yet
- SENSORS FOR SPACE APPLICATIONSDocument6 pagesSENSORS FOR SPACE APPLICATIONSamiriut97No ratings yet
- Obstacle Detection Progress for UGVsDocument14 pagesObstacle Detection Progress for UGVsPrasenjit SahaNo ratings yet
- Analysis of Rigorous Orientation Models For Pushbroom Sensors. Applications With QuickbirdDocument6 pagesAnalysis of Rigorous Orientation Models For Pushbroom Sensors. Applications With QuickbirdJuan MachadoNo ratings yet
- PROBA-3 FORMATION FLYING DEMONSTRATION MISSION DESIGNDocument8 pagesPROBA-3 FORMATION FLYING DEMONSTRATION MISSION DESIGNperrot louisNo ratings yet
- 12 Determination Orbite PDFDocument8 pages12 Determination Orbite PDFjjaavvmmNo ratings yet
- Autonomous Landing of An Unmanned Helicopter Based On Vision and Inertial SensingDocument11 pagesAutonomous Landing of An Unmanned Helicopter Based On Vision and Inertial SensingKarthik NiyanthaNo ratings yet
- Satellite Photogrammetry (NEW)Document54 pagesSatellite Photogrammetry (NEW)Vishal MishraNo ratings yet
- Expert System for satellite stationkeepingDocument12 pagesExpert System for satellite stationkeepingAjakaiye FolorunshoNo ratings yet
- CCE 2018 Paper 60Document6 pagesCCE 2018 Paper 60JLuis LuNaNo ratings yet
- Bul119 Chap8Document5 pagesBul119 Chap8hjhjhj ghhjhNo ratings yet
- Mars Curiosity Rover CamerasDocument17 pagesMars Curiosity Rover CamerasAviation/Space History LibraryNo ratings yet
- Remotesensing 13 03467 v3Document19 pagesRemotesensing 13 03467 v3kaminlinuxNo ratings yet
- 3.toward A Mobile AutonomousDocument8 pages3.toward A Mobile AutonomoussandeeppothugantiNo ratings yet
- Formation Flying: A Subject Being Fast Unfolding in Space: Wang Xiang, John Leif JorgensenDocument5 pagesFormation Flying: A Subject Being Fast Unfolding in Space: Wang Xiang, John Leif JorgensenebookscribdNo ratings yet
- Vision-Aided Inertial Navigation For PPLDocument8 pagesVision-Aided Inertial Navigation For PPLmeng775928yuNo ratings yet
- Satellite-Based PositioningDocument11 pagesSatellite-Based Positioningarchana palNo ratings yet
- Swarm Exploration of Unknown Areas On Mars Using SLAMDocument7 pagesSwarm Exploration of Unknown Areas On Mars Using SLAMhbhbhb hbhbhbNo ratings yet
- Horus - A Cubesat-Based Multi-Angle and Multi-Spectral Earth Observation (Eo) SystemDocument5 pagesHorus - A Cubesat-Based Multi-Angle and Multi-Spectral Earth Observation (Eo) SystemFahim MunawarNo ratings yet
- A Stratospheric Balloon GNSS-R Experiment: The Cat-2 Project in DLR/SNSB BexusDocument4 pagesA Stratospheric Balloon GNSS-R Experiment: The Cat-2 Project in DLR/SNSB BexusamruthanarayananNo ratings yet
- Isprsarchives XL 2 W2 93 2013Document6 pagesIsprsarchives XL 2 W2 93 2013hamdi muhumedNo ratings yet
- A Sensor Fusion Algorithm For Cooperative LocalizationDocument8 pagesA Sensor Fusion Algorithm For Cooperative LocalizationVijaya YajnanarayanaNo ratings yet
- UAV and laser scanner for architectural surveysDocument6 pagesUAV and laser scanner for architectural surveysYakoub ChekimaNo ratings yet
- Nano Satellite OverviewDocument8 pagesNano Satellite Overviewssiddiqi6No ratings yet
- Automated Detection of Orbital Debris in Digital Video Data From A Telescope, HebertDocument7 pagesAutomated Detection of Orbital Debris in Digital Video Data From A Telescope, HebertcluetusNo ratings yet
- Staring Imaging Real Time Optimal Control Based On Neural NetworkDocument14 pagesStaring Imaging Real Time Optimal Control Based On Neural NetworksabreurNo ratings yet
- Kalman 3. Robot PaltillDocument9 pagesKalman 3. Robot PaltillTrung KiênNo ratings yet
- ITU Radio Regulation & Space Traffic ManagementDocument19 pagesITU Radio Regulation & Space Traffic ManagementSaeed JamshidiNo ratings yet
- Ubicomm 2015 5 10 10080Document7 pagesUbicomm 2015 5 10 10080Norbi SzántóNo ratings yet
- Space Robotics Applications and ChallengesDocument31 pagesSpace Robotics Applications and Challengessnobbcheater100% (1)
- Attitude Estimation PDFDocument9 pagesAttitude Estimation PDFbendisudhakar3536No ratings yet
- GeologyDocument7 pagesGeologyAbdur RaufNo ratings yet
- PROBA-3 HIGH PRECISION FORMATION FLYING CONTROL SYSTEMDocument11 pagesPROBA-3 HIGH PRECISION FORMATION FLYING CONTROL SYSTEMperrot louisNo ratings yet
- Multi Satellites Scheduling Algorithm BaDocument14 pagesMulti Satellites Scheduling Algorithm BaKhalil KafrouniNo ratings yet
- Odometry Fusion IMU - 1.5066524Document9 pagesOdometry Fusion IMU - 1.5066524flv_91No ratings yet
- 91473T PDFDocument7 pages91473T PDFHORAXCIOUSNo ratings yet
- Current-Based Slippage Detection and Odometry Correction For Mobile Robots and Planetary RoversDocument13 pagesCurrent-Based Slippage Detection and Odometry Correction For Mobile Robots and Planetary RoversKerry SunNo ratings yet
- Camera Calibration From A Single Night Sky ImageDocument7 pagesCamera Calibration From A Single Night Sky ImageZikang XieNo ratings yet
- PyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1From EverandPyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1No ratings yet
- Spacecraft Dynamics and Control: The Embedded Model Control ApproachFrom EverandSpacecraft Dynamics and Control: The Embedded Model Control ApproachRating: 5 out of 5 stars5/5 (1)
- Multi-Stereo 3D Object Reconstruction: Figure 1. Visual Hull Construction by Cone In-TersectionDocument8 pagesMulti-Stereo 3D Object Reconstruction: Figure 1. Visual Hull Construction by Cone In-TersectionwangjianpingsdNo ratings yet
- Structured Light-Based Hazard Detection For Planetary Surface NavigationDocument7 pagesStructured Light-Based Hazard Detection For Planetary Surface NavigationwangjianpingsdNo ratings yet
- Investigating Habitability With An Integrated Rock-Climbing Robot and Astrobiology Instrument SuiteDocument23 pagesInvestigating Habitability With An Integrated Rock-Climbing Robot and Astrobiology Instrument SuitewangjianpingsdNo ratings yet
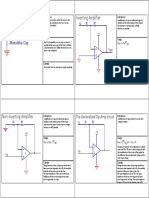
- Bypass Capacitor Inverting Amplifier: The Generalized Op Amp CircuitDocument4 pagesBypass Capacitor Inverting Amplifier: The Generalized Op Amp CircuitwangjianpingsdNo ratings yet
- A Point Cloud Data Reduction Method Based On CurvatureDocument5 pagesA Point Cloud Data Reduction Method Based On CurvaturewangjianpingsdNo ratings yet
- The Deng Xiaoping EraDocument12 pagesThe Deng Xiaoping ErawangjianpingsdNo ratings yet
- MATLAB Tutorial 2013Document43 pagesMATLAB Tutorial 2013vinaysammNo ratings yet
- A Stereo Perception Framework For Autonomous VehiclesDocument6 pagesA Stereo Perception Framework For Autonomous Vehicles4728Vishakha KambleNo ratings yet
- Stereo Vision Applying Opencv and Raspberry Pi: Commission IIDocument5 pagesStereo Vision Applying Opencv and Raspberry Pi: Commission IISouvik DattaNo ratings yet
- Computer Vision Projective Geometry and Calibration: Professor HagerDocument67 pagesComputer Vision Projective Geometry and Calibration: Professor Hagersab108No ratings yet
- C280 Computer Vision Stereo LectureDocument131 pagesC280 Computer Vision Stereo LectureUdaranga WickramasingheNo ratings yet
- ENVI Tutorial: Orthorectifying Aerial PhotographsDocument12 pagesENVI Tutorial: Orthorectifying Aerial PhotographsPartha GhoshNo ratings yet
- Computer Vision Toolbox (Matlab)Document10 pagesComputer Vision Toolbox (Matlab)Hotland SitorusNo ratings yet
- Single-View Geometry of A Rectangle With Application To Whiteboard Image RectificationDocument7 pagesSingle-View Geometry of A Rectangle With Application To Whiteboard Image RectificationRazvan PistoleaNo ratings yet
- Cylindrical Rectification PDFDocument7 pagesCylindrical Rectification PDFShi LiliNo ratings yet
- Epipolar Geometry 2Document50 pagesEpipolar Geometry 2David LichaaNo ratings yet
- Photo Plan ManualDocument327 pagesPhoto Plan ManualTareas Hacemos Sus TareasNo ratings yet
- Stereo Vision-Estimation of Disparity: Advanced Computer Vision Course MEC - 301/2Document29 pagesStereo Vision-Estimation of Disparity: Advanced Computer Vision Course MEC - 301/2Rekha JayaprakashNo ratings yet
- Epipolar GeometryDocument14 pagesEpipolar GeometryphysicsnewblolNo ratings yet
- Programming Assignment 3 3D Reconstruction: InstructionsDocument15 pagesProgramming Assignment 3 3D Reconstruction: InstructionsHilbert JeffNo ratings yet
- Photogrammetric Applications For Cultural HeritageDocument128 pagesPhotogrammetric Applications For Cultural HeritageKathy JancesNo ratings yet
- Lab 1Document14 pagesLab 1HudaNo ratings yet
- Computer Vision System ToolboxDocument10 pagesComputer Vision System ToolboxClaudia Angélica Rivera RomeroNo ratings yet
- Stereovision Based Hand Gesture RecognitionDocument30 pagesStereovision Based Hand Gesture RecognitionVikram Shenoy HandiruNo ratings yet
- Automatic Rectification of Perspective Distortion From A Single Image Using Plane Homography PDFDocument12 pagesAutomatic Rectification of Perspective Distortion From A Single Image Using Plane Homography PDFAnonymous lVQ83F8mCNo ratings yet
- GSE 189 Lab 4Document15 pagesGSE 189 Lab 4Jasper MollenoNo ratings yet
- The Technology of Image Processing Used in Automatic Target-Scoring SystemDocument4 pagesThe Technology of Image Processing Used in Automatic Target-Scoring SystemDedy LoebisNo ratings yet
- 15 April 2020 - Session1 - Digital Image Enhancement - Mrs Minikashi KumarDocument40 pages15 April 2020 - Session1 - Digital Image Enhancement - Mrs Minikashi KumarAnita Sofia KeyserNo ratings yet