You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5810)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (843)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (346)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Service Entrance - Meralco StandardsDocument1 pageService Entrance - Meralco StandardsMark Tristan Vallesteros83% (18)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Winchester Model 1885 2Document13 pagesWinchester Model 1885 2carlosfanjul1No ratings yet
- Genius-Series - Operation Manual 3a - Gie-0309-Om3a - Scan1Document71 pagesGenius-Series - Operation Manual 3a - Gie-0309-Om3a - Scan1Centrifugal Separator0% (1)
- Dogs in The Vineyard NPC SheetDocument1 pageDogs in The Vineyard NPC SheetJérôme VerretNo ratings yet
- Water Jetting Guns: Dump & Dry Shut 10,000 - 15 - 20,000 PSIDocument1 pageWater Jetting Guns: Dump & Dry Shut 10,000 - 15 - 20,000 PSIFrederik CañabiNo ratings yet
- Accesorios StarlinkDocument8 pagesAccesorios StarlinkRoy rolando Choque chillitupaNo ratings yet
- Desmontaje Paquete de Embrague d7g2Document11 pagesDesmontaje Paquete de Embrague d7g2cristian chuquicondor torres100% (2)
- 052CDMDS20210326Document53 pages052CDMDS20210326mahmuda levianiNo ratings yet
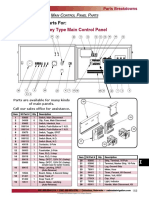
- p169 NI Main Control Panel PartsDocument1 pagep169 NI Main Control Panel PartsFRANCISCO JAVIER RUEDA LOPEZNo ratings yet
- VP28 Assembly Aid Rev - 1Document4 pagesVP28 Assembly Aid Rev - 1Lucas RossoNo ratings yet
- 169362d1439746672 Kdss Calibration Suspension Control Suspension Control System W Kdss Vehicle IDocument3 pages169362d1439746672 Kdss Calibration Suspension Control Suspension Control System W Kdss Vehicle IkkotarooNo ratings yet
- 900 Lb. FM-200 Cylinder: FeaturesDocument2 pages900 Lb. FM-200 Cylinder: FeaturesLogan Marquez AguayoNo ratings yet
- Sunstar KM-506, KM-530Document27 pagesSunstar KM-506, KM-530Einer HuilaNo ratings yet
- 3 Ton 36000 BTUs Split Air ConditionersDocument2 pages3 Ton 36000 BTUs Split Air ConditionersNayif MuhammedNo ratings yet
- MFO Series Current TransformersDocument3 pagesMFO Series Current TransformersEngineerOmarNo ratings yet
- HS 420Document1 pageHS 420sayed abotalibNo ratings yet
- Monessen Ambient Technologies BrochureDocument6 pagesMonessen Ambient Technologies BrochureAnonymous 9LSH5i2oAONo ratings yet
- Haier MRV5 Catalog 11.5.21Document3 pagesHaier MRV5 Catalog 11.5.21hnh92.gpNo ratings yet
- 95-8444-10.1 - U9500 CatalogoDocument50 pages95-8444-10.1 - U9500 CatalogoFelipe Perez EsquivelNo ratings yet
- Technical Specification: 1) Filter Feed Pump With Motor 1 NosDocument4 pagesTechnical Specification: 1) Filter Feed Pump With Motor 1 NosKamatchi NathanNo ratings yet
- Components of Electro-Pneumatic Circuit Schematic Symbols and FunctionsDocument2 pagesComponents of Electro-Pneumatic Circuit Schematic Symbols and FunctionsRobmarychris Agnes ValdezNo ratings yet
- EarthingDocument32 pagesEarthingRishabh Kumar100% (1)
- Catalogue 24 KV Switchgear - Simoprime A4 PDFDocument11 pagesCatalogue 24 KV Switchgear - Simoprime A4 PDFhermawanNo ratings yet
- Topaire Wall Mounted R32 Gas TWM/AG3 /catalogue 2023Document4 pagesTopaire Wall Mounted R32 Gas TWM/AG3 /catalogue 2023bitalohNo ratings yet
- Equi Portfolio (Capsule Filler) PDFDocument3 pagesEqui Portfolio (Capsule Filler) PDFHilmi Ζωή Δεν ΑγαπώNo ratings yet
- R8563C Kitz 204Document64 pagesR8563C Kitz 204Rinda_Rayna100% (1)
- Model 50 (TS) Series Soda Post-Mix Refrigeration Unit Parts List For ModelsDocument8 pagesModel 50 (TS) Series Soda Post-Mix Refrigeration Unit Parts List For ModelsAmauri RogérioNo ratings yet
- UM001 - Franke - CE-50 TE-50 CE-75 TE-75 TE-75S TE-125 TE-125BFDocument128 pagesUM001 - Franke - CE-50 TE-50 CE-75 TE-75 TE-75S TE-125 TE-125BFPioNo ratings yet
- Experiment #7: Slip Ring Motor: Alasala CollegesDocument5 pagesExperiment #7: Slip Ring Motor: Alasala CollegesabdullahNo ratings yet
- Complete BOP Stack SpaceoutDocument10 pagesComplete BOP Stack SpaceoutAderobaki GbengaNo ratings yet