You might also like
- Moja Wiedza TOB2Document44 pagesMoja Wiedza TOB2ZgodajazNo ratings yet
- Metoda GłuszkowaDocument4 pagesMetoda GłuszkowaJogobella ŁugowskaNo ratings yet
- Wykłady Z ChemiiDocument31 pagesWykłady Z ChemiijanwfiisNo ratings yet
- Maszyny Przep-YwoweDocument4 pagesMaszyny Przep-YwoweMateusz FitasNo ratings yet
- Cw2 Filtry Z Elementami PasywnymiDocument8 pagesCw2 Filtry Z Elementami PasywnymiWiktor ChmielewskiNo ratings yet
- Sciaga WiewioraDocument2 pagesSciaga WiewioraMateusz FitasNo ratings yet
- CW 2Document4 pagesCW 2noto gejNo ratings yet
- 4 Obliczenia) 213442Document34 pages4 Obliczenia) 213442BloodyyyNo ratings yet
- Numeryczne Badanie Przeplywow Taylora-Couetta Z Wymiana Ciepla Metoda SVVDocument24 pagesNumeryczne Badanie Przeplywow Taylora-Couetta Z Wymiana Ciepla Metoda SVV1112mikroekonomiaNo ratings yet
- Przetworniki CADocument28 pagesPrzetworniki CAasdadssNo ratings yet
- TOv 2Document9 pagesTOv 2Michał MNo ratings yet
- Ele2 1Document18 pagesEle2 1Jan KowalskiNo ratings yet
- PrzerzutnikiDocument30 pagesPrzerzutnikiapi-26356906100% (1)
- Zadania CW 3Document2 pagesZadania CW 3CS, EngineeringNo ratings yet
- Notatek PL Kinematyka Turbin WykladDocument5 pagesNotatek PL Kinematyka Turbin WykladMateusz FitasNo ratings yet
- 4.sygnały: ElektryczneDocument29 pages4.sygnały: ElektryczneJulia PrzybylskaNo ratings yet
- TablicetermoDocument8 pagesTablicetermoPaweł PawełNo ratings yet
- Ie w3 Is7 - Prąd Ac - 2hDocument29 pagesIe w3 Is7 - Prąd Ac - 2hlary007No ratings yet
- Wyklad STW 1Document19 pagesWyklad STW 1Witold RudzińskiNo ratings yet
- Ruchy Jednostajny ProstoliniowyDocument9 pagesRuchy Jednostajny ProstoliniowyGhostNo ratings yet
- Wzory Do Teorii Z Podstaw Termodynamiki Dla USMDocument3 pagesWzory Do Teorii Z Podstaw Termodynamiki Dla USMsensacjeNo ratings yet
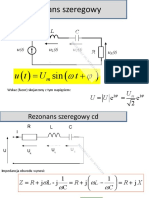
- Rezonans SzeregowyDocument19 pagesRezonans SzeregowyKamil SzNo ratings yet
- Transmitancja OperatorowaDocument9 pagesTransmitancja OperatorowaWeronika GerczewNo ratings yet
- Obliczenie Wciecia Wstecz Za Pomoca Symboli RachunkowychDocument1 pageObliczenie Wciecia Wstecz Za Pomoca Symboli RachunkowychTymek BorowieckiNo ratings yet
- EM - PrezDocument117 pagesEM - Prezkacperg0608No ratings yet
- Zestaw Pytan IA WWWDocument39 pagesZestaw Pytan IA WWWAdrián BuenfilNo ratings yet
- FORMULARIDocument1 pageFORMULARIAle Pineda GarzonNo ratings yet
- ĆW 8 ZwrotDocument6 pagesĆW 8 Zwrotpomava5474No ratings yet
- Iii2 Transformacja Lorentza Polozenia I CzasuDocument20 pagesIii2 Transformacja Lorentza Polozenia I CzasuidomNo ratings yet
- Prostowniki Sterowane PDFDocument10 pagesProstowniki Sterowane PDFKrzysztof LądNo ratings yet
- Lista4 ZadaniaKurvAndSurfInt PDFDocument4 pagesLista4 ZadaniaKurvAndSurfInt PDFAleksanderNo ratings yet
- Laboratorium Podstaw Fizyki SoczewkiDocument6 pagesLaboratorium Podstaw Fizyki SoczewkiJanNo ratings yet
- D Min Max SK AvDocument2 pagesD Min Max SK AvRafał NiedbałowskiNo ratings yet
- Inżynieria Chemiczna - IIDocument138 pagesInżynieria Chemiczna - IILeokadia ŻukowskaNo ratings yet
- Mechanika Płynów2Document10 pagesMechanika Płynów2Piotr MalinowskiNo ratings yet
- O Spadaniu KulDocument3 pagesO Spadaniu KulOliwier UrbańskiNo ratings yet
- 1Document1 page1Omar AhmedNo ratings yet
- LaplaceDocument1 pageLaplaceGabriel porrasNo ratings yet
- Pracadyplomowa WmitDocument3 pagesPracadyplomowa Wmitjustynaturowska57No ratings yet
- 2008.02.14 Egzamin PoprDocument2 pages2008.02.14 Egzamin PoprRafał NiedbałowskiNo ratings yet
- Elektrod 02Document130 pagesElektrod 02Max EisenhardtNo ratings yet
- Fizyka Zadania PredkoscDocument29 pagesFizyka Zadania PredkoscJakub HahnNo ratings yet
- Układy Elektroniczne-Z. Popr Ii 28.09.2007Document2 pagesUkłady Elektroniczne-Z. Popr Ii 28.09.2007Rafał NiedbałowskiNo ratings yet
- Wykresy Rownowagi FazowejDocument25 pagesWykresy Rownowagi Fazowejt.o.k.a.rNo ratings yet
- Węgiel I Jego Związki Z Wodorem KluczDocument2 pagesWęgiel I Jego Związki Z Wodorem Kluczkarina wawryka100% (1)
- Szeregowe - Polaczenie RLCDocument2 pagesSzeregowe - Polaczenie RLCLukipukiNo ratings yet
- Eit 2Document39 pagesEit 2chibricosicNo ratings yet
- Matematyka TabliceDocument4 pagesMatematyka TabliceMarcin BrudnickiNo ratings yet
- Komputerowa Symulacja Obwodow RLCDocument2 pagesKomputerowa Symulacja Obwodow RLCdasNo ratings yet
- Grafy Goniometrických FunkciíDocument1 pageGrafy Goniometrických FunkciíNika LikaNo ratings yet
- Kolokwium1 Obszerne NotatkiDocument24 pagesKolokwium1 Obszerne Notatkimagmatic624No ratings yet
- Kol 2010 RDocument2 pagesKol 2010 RМиљан КовачевићNo ratings yet
- Lista Formule GDif IDocument1 pageLista Formule GDif Ipaducel doinaNo ratings yet
- KisielewaDocument3 pagesKisielewajaneckihNo ratings yet
- Ćwiczenie 7. Własności Dynamiczne Przetworników Pierwszego Rzędu Cel ĆwiczeniaDocument7 pagesĆwiczenie 7. Własności Dynamiczne Przetworników Pierwszego Rzędu Cel Ćwiczeniapledzwon123No ratings yet
- s1 2015 GRBDocument1 pages1 2015 GRBPrzemysław KomosińskiNo ratings yet
- REAKTORY2012 W8 w12Document82 pagesREAKTORY2012 W8 w12Tomasz WasilewskiNo ratings yet
- Całki KrzywolinioweDocument14 pagesCałki KrzywolinioweOliwierNo ratings yet
- Labto cw1Document16 pagesLabto cw1kamilpekosNo ratings yet
- 2 - Model SilnikaDocument5 pages2 - Model Silnikakosa3No ratings yet
- Ściąga Automatyka I RobotykaDocument6 pagesŚciąga Automatyka I RobotykaDamian DudłoNo ratings yet
- Korbel LaboratoriumDocument133 pagesKorbel LaboratoriumrafalNo ratings yet
- Test DTDocument10 pagesTest DTMiłoszJaroszNo ratings yet
- Technika SA - Andrzej LeśnickiDocument875 pagesTechnika SA - Andrzej Leśnickibardzo niestrawnyNo ratings yet
- Cw.3 Dyskretne Sygnaly StochastyczneDocument21 pagesCw.3 Dyskretne Sygnaly StochastyczneArtur PodolskiNo ratings yet
- 2022 - AiR Przetworniki PomiaroweDocument493 pages2022 - AiR Przetworniki PomiaroweMichał JanickiNo ratings yet
- Rownania Dynamiczne MatlabDocument19 pagesRownania Dynamiczne MatlabMarcin CzochraNo ratings yet