You might also like
- Optimal Trading Without Optimal ControlDocument23 pagesOptimal Trading Without Optimal ControlEdwin DiazNo ratings yet
- T T T T T T T T TDocument18 pagesT T T T T T T T TLuca PilottiNo ratings yet
- Stock Market Analysis Using Multidimensional Scaling: Ravee MallaDocument5 pagesStock Market Analysis Using Multidimensional Scaling: Ravee MallarajritesNo ratings yet
- Optimal High-Frequency Market Making StrategyDocument19 pagesOptimal High-Frequency Market Making StrategyJose Antonio Dos Ramos100% (3)
- Reinforcement Learning For High Frequency Market MakingDocument6 pagesReinforcement Learning For High Frequency Market MakingJose Antonio Dos RamosNo ratings yet
- Kumar - Deep Recurrent Q-Networks For Market Making PDFDocument10 pagesKumar - Deep Recurrent Q-Networks For Market Making PDFStephane MysonaNo ratings yet
- A Hybrid Combinatorial Approach To A Two-Stage Stochastic Portfolio Optimization Model With Uncertain Asset PricesDocument17 pagesA Hybrid Combinatorial Approach To A Two-Stage Stochastic Portfolio Optimization Model With Uncertain Asset PricesPFE FSJESTeNo ratings yet
- A Mean-VaR Based Deep Reinforcement Learning Framework For Practical Algorithmic TradingDocument14 pagesA Mean-VaR Based Deep Reinforcement Learning Framework For Practical Algorithmic TradingYang FeiNo ratings yet
- DeepMRC AAAI20Document8 pagesDeepMRC AAAI20Chua Yong Sheng DarrenNo ratings yet
- Numerical Approximation of A Cash-Constrained Firm Value With Investment OpportunitiesDocument39 pagesNumerical Approximation of A Cash-Constrained Firm Value With Investment OpportunitiesRudi PurwanaNo ratings yet
- Rebalancing An Investment Portfolio in The Presence of Transaction CostsDocument19 pagesRebalancing An Investment Portfolio in The Presence of Transaction CostsprintmathNo ratings yet
- Determining Successful Negotiation Strategies: An Evolutionary ApproachDocument8 pagesDetermining Successful Negotiation Strategies: An Evolutionary ApproachAnderson Muniz SantosNo ratings yet
- No 76Document44 pagesNo 76eeeeewwwwwwwwNo ratings yet
- Estimation of Risk-Neutral Density SurfacesDocument35 pagesEstimation of Risk-Neutral Density SurfacesdfdosreisNo ratings yet
- Dynamic Surplus OptimizationDocument31 pagesDynamic Surplus OptimizationdeepNo ratings yet
- Learning To Trade With Deep Actor Critic MethodsDocument6 pagesLearning To Trade With Deep Actor Critic MethodsNewton LinchenNo ratings yet
- Neurips 2018Document7 pagesNeurips 2018thyagosmesmeNo ratings yet
- Optimal Trading in Automatic Market Makers With Deep LearningDocument14 pagesOptimal Trading in Automatic Market Makers With Deep LearningJason ZongNo ratings yet
- Axonify: Budget For Rapid Growth Case StudyDocument10 pagesAxonify: Budget For Rapid Growth Case StudysahityaNo ratings yet
- Deep Reinforcement Learning For Trading: Correspondence To: Zihao ZhangDocument16 pagesDeep Reinforcement Learning For Trading: Correspondence To: Zihao ZhangcarlicusNo ratings yet
- (BAO, 2014) A Simulation-Based Portfolio Optimization Approach With Least Squares LearningDocument6 pages(BAO, 2014) A Simulation-Based Portfolio Optimization Approach With Least Squares LearningarnaudNo ratings yet
- Bouchard, Dang, Lehalle - Optimal Control of Trading Algorithms - A General Impulse Control ApproachDocument30 pagesBouchard, Dang, Lehalle - Optimal Control of Trading Algorithms - A General Impulse Control ApproachnguyenhoangnguyenntNo ratings yet
- Dynamic Portfolio Selection With Market Impact CostsDocument8 pagesDynamic Portfolio Selection With Market Impact CostsHassan AlJishiNo ratings yet
- RTP Ritter WebDocument6 pagesRTP Ritter WebdavidinmexicoNo ratings yet
- The 'Ratchet Principle' and Performance IncentivesDocument8 pagesThe 'Ratchet Principle' and Performance IncentivesMaria Paula Robles BulaNo ratings yet
- Carassus Rásonyi2020 Article Risk NeutralPricingForArbitragDocument16 pagesCarassus Rásonyi2020 Article Risk NeutralPricingForArbitragAnshul GoelNo ratings yet
- TradeDocument6 pagesTradekyleleefakeNo ratings yet
- Open Loginov13aDocument8 pagesOpen Loginov13aDebaditya ChatterjeeNo ratings yet
- ECN346 Exam Paper - May 2021-22Document5 pagesECN346 Exam Paper - May 2021-22reddepedoNo ratings yet
- The University of Chicago Press The Journal of BusinessDocument24 pagesThe University of Chicago Press The Journal of BusinessmcyNo ratings yet
- Leverage EfficiencyDocument24 pagesLeverage EfficiencyyeonglohNo ratings yet
- Deep Reinforcement Learning For Automated Stock Trading - An Ensemble StrategyDocument9 pagesDeep Reinforcement Learning For Automated Stock Trading - An Ensemble StrategySean CheongNo ratings yet
- Kolm 1969Document15 pagesKolm 1969hamelat benachourNo ratings yet
- Market Equilibrium For CES Exchange Economies: Existence, Multiplicity, and ComputationDocument12 pagesMarket Equilibrium For CES Exchange Economies: Existence, Multiplicity, and Computationtestuser123xvNo ratings yet
- SSRN Id4264823Document48 pagesSSRN Id4264823fermetabouvheNo ratings yet
- Investment Risk Appraisal: Department of Economics and Finance and Finance, Brunel University, Uxbridge, UB8 3PH, UKDocument25 pagesInvestment Risk Appraisal: Department of Economics and Finance and Finance, Brunel University, Uxbridge, UB8 3PH, UKAlvaro StebanNo ratings yet
- The Matching of Assets With Liabilities by Goal ProgrammingDocument4 pagesThe Matching of Assets With Liabilities by Goal ProgrammingBaraa SbaihNo ratings yet
- Money in Utility Model Macro Problem SetDocument3 pagesMoney in Utility Model Macro Problem Set伍大開No ratings yet
- 9 Consumption-Based Models: 9.1 Assumptions and NotationDocument6 pages9 Consumption-Based Models: 9.1 Assumptions and NotationFaizul Hyun JeaNo ratings yet
- A Mathematical Analysis of Technical AnalysisDocument30 pagesA Mathematical Analysis of Technical AnalysisAlan GoodridgeNo ratings yet
- No-Armageddon Measure for Credit Index OptionsDocument21 pagesNo-Armageddon Measure for Credit Index OptionsSapiensNo ratings yet
- Heat Kernel Framework For Asset Pricing in Finite TimeDocument34 pagesHeat Kernel Framework For Asset Pricing in Finite Timeoiskandardinata1No ratings yet
- Predicting Daily Trading Volume via Various Hidden StatesDocument14 pagesPredicting Daily Trading Volume via Various Hidden StateskarepanmanNo ratings yet
- Incorporating Liquidity Risk into VaR ModelsDocument12 pagesIncorporating Liquidity Risk into VaR ModelsTin Yu LamNo ratings yet
- Anomalous Price Impact and The Critical Nature of Liquidity in Financial MarketsDocument16 pagesAnomalous Price Impact and The Critical Nature of Liquidity in Financial MarketsnalyatNo ratings yet
- Introduction to Production-Possibility frontier in EconomicsDocument17 pagesIntroduction to Production-Possibility frontier in EconomicsYasir ArainNo ratings yet
- Deep HedgingDocument21 pagesDeep HedgingRaju KaliperumalNo ratings yet
- Simulated Annealing For Complex Portfolio Selection ProblemsDocument26 pagesSimulated Annealing For Complex Portfolio Selection Problemsveeken77No ratings yet
- Monte Carlo Methods in Finance An Introductory TutDocument10 pagesMonte Carlo Methods in Finance An Introductory TutNicolas LeãoNo ratings yet
- Hedging and Portfolio Optimization in Financial Markets With A Large TraderDocument24 pagesHedging and Portfolio Optimization in Financial Markets With A Large TraderJohn DoesNo ratings yet
- Swiss Finance Institute: Research Paper Series N°19-80Document14 pagesSwiss Finance Institute: Research Paper Series N°19-80zzzvtNo ratings yet
- Improving Technical Trading Systems by Using A New MATLAB Based Genetic Algorithm ProcedureDocument6 pagesImproving Technical Trading Systems by Using A New MATLAB Based Genetic Algorithm ProceduremohitbguptaNo ratings yet
- A Linear Programming Approach To Solving Stochastic Dynamic ProgramsDocument39 pagesA Linear Programming Approach To Solving Stochastic Dynamic ProgramskcvaraNo ratings yet
- A General Framework For Portfolio Theory-Part I THDocument43 pagesA General Framework For Portfolio Theory-Part I THishikakeswani4No ratings yet
- Optimal Investment With Intermediate Consumption and Random EndowmentDocument20 pagesOptimal Investment With Intermediate Consumption and Random Endowmentquew3No ratings yet
- A Boosting Approach For Automated TradingDocument10 pagesA Boosting Approach For Automated TradingmerlinakisNo ratings yet
- VNT - Step 3 - Group - 212032 - 31 CopiladoDocument14 pagesVNT - Step 3 - Group - 212032 - 31 Copiladocarlos andres salgado restrepoNo ratings yet
- A Pairs Trading Strategy For GOOG:GOOGL Using Machine LearningDocument5 pagesA Pairs Trading Strategy For GOOG:GOOGL Using Machine Learningalexa_sherpyNo ratings yet
- High-frequency trading in a limit order book strategyDocument13 pagesHigh-frequency trading in a limit order book strategyKwok Chung ChuNo ratings yet
- Principles of Operating Systems: Lecture 4 - Process Synchronization Ardalan Amiri SaniDocument78 pagesPrinciples of Operating Systems: Lecture 4 - Process Synchronization Ardalan Amiri SaniAnnie FreebiesNo ratings yet
- Special Member FunctionsDocument87 pagesSpecial Member FunctionsAnnie FreebiesNo ratings yet
- Poker HandsDocument13 pagesPoker HandsAnnie FreebiesNo ratings yet
- Robust Market Making Via Adversarial Reinforcement LearningDocument7 pagesRobust Market Making Via Adversarial Reinforcement LearningAnnie FreebiesNo ratings yet
- Soft HardDocument11 pagesSoft HardAnnie FreebiesNo ratings yet
- Unix Programming ToolsDocument16 pagesUnix Programming ToolsMichel Marcos García BadilloNo ratings yet
- Post GR Esq L Notes For ProfessionalsDocument73 pagesPost GR Esq L Notes For ProfessionalsFede ConteNo ratings yet
- Pandas 0 11 0Document488 pagesPandas 0 11 0Annie FreebiesNo ratings yet
- PandasDocument398 pagesPandasAnnie FreebiesNo ratings yet
- Pycon 2010Document19 pagesPycon 2010Abd Rahman HidayatNo ratings yet
- Pandas 0 11 0 DevDocument464 pagesPandas 0 11 0 DevAnnie FreebiesNo ratings yet
- A Collection of Dice Problems: With Solutions and Useful AppendicesDocument97 pagesA Collection of Dice Problems: With Solutions and Useful AppendicesMsNo ratings yet
- Writing WellDocument24 pagesWriting WellAnnie FreebiesNo ratings yet
- Happier Day - Market Segmentation Beachhead and TAM PDFDocument3 pagesHappier Day - Market Segmentation Beachhead and TAM PDFAnnie FreebiesNo ratings yet
- HomeSoft Business PlanDocument30 pagesHomeSoft Business PlanMarvin SisNo ratings yet
- Anti DerivativesDocument8 pagesAnti DerivativesKeenan KonNo ratings yet
- The Pragmatic Programmer 5Document1 pageThe Pragmatic Programmer 5Annie FreebiesNo ratings yet
- The Pragmatic Programmer 3Document1 pageThe Pragmatic Programmer 3Annie FreebiesNo ratings yet
- Easyviz Documentation: A Unified Interface for Scientific Visualization and Plotting in PythonDocument68 pagesEasyviz Documentation: A Unified Interface for Scientific Visualization and Plotting in PythonAnnie FreebiesNo ratings yet
- The Pragmatic Programmer 4Document1 pageThe Pragmatic Programmer 4Annie FreebiesNo ratings yet
- Opt 2Document1 pageOpt 2Annie FreebiesNo ratings yet
- Modeling Population Growth with Exponential FunctionsDocument16 pagesModeling Population Growth with Exponential FunctionsAnnie FreebiesNo ratings yet
- Exponential FunctionsDocument4 pagesExponential FunctionsAnnie FreebiesNo ratings yet
- The Natural Exponential FunctionDocument4 pagesThe Natural Exponential Functionnewengland6No ratings yet
- Logarithmic FunctionsDocument2 pagesLogarithmic FunctionsAnnie FreebiesNo ratings yet
- Modeling Population Growth with Exponential FunctionsDocument16 pagesModeling Population Growth with Exponential FunctionsAnnie FreebiesNo ratings yet
- Laws of LogarithmsDocument3 pagesLaws of LogarithmsAnnie FreebiesNo ratings yet
- IAL Mathematics Sample Assessment MaterialDocument460 pagesIAL Mathematics Sample Assessment MaterialMohamed Naaif100% (3)
- A Revolutionary Look at Sky CreaturesDocument197 pagesA Revolutionary Look at Sky Creaturesocryptid100% (4)
- 22Document50 pages22physicsdocs87% (15)
- Renewable and Non-Renewable Natural Resources ModuleDocument9 pagesRenewable and Non-Renewable Natural Resources ModuleEnzuNo ratings yet
- Physics Lab Critical Angle IADocument4 pagesPhysics Lab Critical Angle IALaquando YoungNo ratings yet
- Lesson Plan Ohms LawDocument4 pagesLesson Plan Ohms Lawjoice samonte100% (1)
- SPE 15493 A Combined Condensing/Vaporizing Mechanism in The Displacement of Oil by Enriched GasesDocument11 pagesSPE 15493 A Combined Condensing/Vaporizing Mechanism in The Displacement of Oil by Enriched GasesMuhammad Umair AliNo ratings yet
- Be A 41 Oc Exp4Document3 pagesBe A 41 Oc Exp4Drunk Driver DetectionNo ratings yet
- Student Exploration: WavesDocument10 pagesStudent Exploration: Wavesamber jenkinsNo ratings yet
- Slip-Line Field Theory for Metal FormingDocument14 pagesSlip-Line Field Theory for Metal FormingSri RamNo ratings yet
- Numerical and Experimental Performance Investigation of A Heat ExchangerDocument12 pagesNumerical and Experimental Performance Investigation of A Heat ExchangerGuilherme RighetoNo ratings yet
- Dim Dos DontsDocument3 pagesDim Dos DontsJake Polo SantiagoNo ratings yet
- Fluid MechanicsDocument27 pagesFluid MechanicsKarl Radison AbreaNo ratings yet
- Sast3884 01Document1 pageSast3884 01Jan JanNo ratings yet
- Unit 1 - How To Access The Portal: Assignment 0Document6 pagesUnit 1 - How To Access The Portal: Assignment 0Arslan HassanNo ratings yet
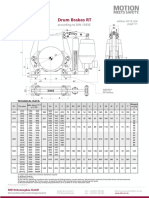
- Drum Brakes RT: According To DIN 15435Document1 pageDrum Brakes RT: According To DIN 15435LukaNo ratings yet
- Cross Flow Heat ExchangerDocument1 pageCross Flow Heat ExchangeramrimuhamadNo ratings yet
- Small-Signal Stability Analysis of A DFIG-Based Wind Power System Under Different Modes of OperationDocument11 pagesSmall-Signal Stability Analysis of A DFIG-Based Wind Power System Under Different Modes of OperationAhmed WestministerNo ratings yet
- Perhitungan Struktur Baja Kuda-Kuda Baja RinganDocument76 pagesPerhitungan Struktur Baja Kuda-Kuda Baja RinganAnnisaSenjakala100% (3)
- DiodeDocument32 pagesDiodejit_72No ratings yet
- Delta ASDA-A2 Series Servo Drive & Motor GuideDocument72 pagesDelta ASDA-A2 Series Servo Drive & Motor Guidefreud007No ratings yet
- Magnetism and Electromagnetism ProblemsDocument9 pagesMagnetism and Electromagnetism ProblemsRabi KhanNo ratings yet
- Active and Passive Cooling Technologies For Thermal Management of AvionicsDocument10 pagesActive and Passive Cooling Technologies For Thermal Management of AvionicsdavidNo ratings yet
- Chapter 1Document22 pagesChapter 1TanishqNo ratings yet
- Gordon, Sementsov-Ogievskii - A Course in Descriptive Geometry - Mir - 1980Document387 pagesGordon, Sementsov-Ogievskii - A Course in Descriptive Geometry - Mir - 1980spicybinga100% (1)
- 2021spring Chemistry 111 StefikDocument10 pages2021spring Chemistry 111 StefikMorgan GalushaNo ratings yet
- Math 2260 Written HW #3 SolutionsDocument4 pagesMath 2260 Written HW #3 SolutionsSan RiaNo ratings yet
- Steel Bridge Design Handbook (US DT FHA)Document1,974 pagesSteel Bridge Design Handbook (US DT FHA)Ulissipo1955No ratings yet
- Inner Vessel Check Shell Thickness For Internal PressureDocument6 pagesInner Vessel Check Shell Thickness For Internal PressureSAMER OSMANNo ratings yet
- The Vapor Pressure and Enthalpy of WaterDocument13 pagesThe Vapor Pressure and Enthalpy of WaterJoseph GulerNo ratings yet
- 3D Modelling For Mechanized Tunnelling in Soft Ground-Influence of The Constitutive ModelDocument13 pages3D Modelling For Mechanized Tunnelling in Soft Ground-Influence of The Constitutive ModelDidaBouchNo ratings yet