You might also like
- Ernst and Young: Quest For TelematicsDocument32 pagesErnst and Young: Quest For TelematicsBlahNo ratings yet
- Mobility Trends Whats Ahead For Automotive SemiconductorsDocument11 pagesMobility Trends Whats Ahead For Automotive SemiconductorsLarryNo ratings yet
- MDM9206 Data Features Overview: 80-P8101-7 Rev. CDocument52 pagesMDM9206 Data Features Overview: 80-P8101-7 Rev. CprakashnpkNo ratings yet
- Covid 19 Key Risks Arising From A PandemicDocument12 pagesCovid 19 Key Risks Arising From A PandemicPasinduNo ratings yet
- MTech Automotive ElectronicsDocument29 pagesMTech Automotive ElectronicsInafar RaFINo ratings yet
- Connected Vehicle Market - 01 Mar 2021Document15 pagesConnected Vehicle Market - 01 Mar 2021SUBHADEEP CHAKRABORTYNo ratings yet
- The Connected TruckDocument11 pagesThe Connected TruckUltimo GuerreroNo ratings yet
- Self DrivingVehiclesReportDocument32 pagesSelf DrivingVehiclesReportarvind guptaNo ratings yet
- Diagnostic in Adaptive AUTOSAR HPC Diagnostics: 05 June 2019 Höhenkirchen, GermanyDocument19 pagesDiagnostic in Adaptive AUTOSAR HPC Diagnostics: 05 June 2019 Höhenkirchen, Germanysaika_1982No ratings yet
- E Book - India & Australia: Strengthening International Cooperation Through The Indo-Pacific Oceans InitiativeDocument141 pagesE Book - India & Australia: Strengthening International Cooperation Through The Indo-Pacific Oceans InitiativeCppr IndiaNo ratings yet
- Introduction To TelematicsDocument3 pagesIntroduction To TelematicsRivegel BaclayNo ratings yet
- Future of Mobility PDFDocument176 pagesFuture of Mobility PDFjuanse200868No ratings yet
- The Future of Automotive Mobility - NewDocument33 pagesThe Future of Automotive Mobility - Newtola jcNo ratings yet
- 10.1 3110007 ES Smart CitiesDocument267 pages10.1 3110007 ES Smart CitiesSakshiNo ratings yet
- Long-Distance Freight Trucking in Canada Industry ReportDocument35 pagesLong-Distance Freight Trucking in Canada Industry ReportBill LeeNo ratings yet
- Antitrust Law and Digital Markets: A Guide To The European Competition Law Experience in The Digital EconomyDocument25 pagesAntitrust Law and Digital Markets: A Guide To The European Competition Law Experience in The Digital EconomyDaman Deep Singh ArnejaNo ratings yet
- Contenido 1Document48 pagesContenido 1elmaingNo ratings yet
- Auteco Mobility Profile 2021Document42 pagesAuteco Mobility Profile 2021Jose.SuarezNo ratings yet
- Esg 11Document31 pagesEsg 11AlexNo ratings yet
- Connected Cars BrochureDocument6 pagesConnected Cars BrochurestanyuanNo ratings yet
- Enabling The Connected Vehicle-White Paper V5Document12 pagesEnabling The Connected Vehicle-White Paper V5Abhishek Verma100% (1)
- Project44 Final PaperDocument22 pagesProject44 Final PaperPrachit BhandariNo ratings yet
- Autonomous Vehicles and Embedded Artificial Intelligence: The Challenges of Framing Machine Driving DecisionsDocument27 pagesAutonomous Vehicles and Embedded Artificial Intelligence: The Challenges of Framing Machine Driving Decisionssor ronNo ratings yet
- Notes On Electric VehiclesDocument60 pagesNotes On Electric VehiclesSiadendaNo ratings yet
- Smart Automotive Telematics ReportDocument26 pagesSmart Automotive Telematics ReportJishnoop JayaprakashNo ratings yet
- Top Five Mobility and Automotive Trends in 2021Document16 pagesTop Five Mobility and Automotive Trends in 2021Thảo LâmNo ratings yet
- Infineon Automotive - Application - Guide ABR v00 - 00 EN PDFDocument60 pagesInfineon Automotive - Application - Guide ABR v00 - 00 EN PDFArvind NangareNo ratings yet
- Driver Behavior ProfilingDocument10 pagesDriver Behavior ProfilingFernando GaxiolaNo ratings yet
- Improving Automobile Insurance Ratemaking Using Telematics: Incorporating Mileage and Driver Behaviour DataDocument23 pagesImproving Automobile Insurance Ratemaking Using Telematics: Incorporating Mileage and Driver Behaviour DataAdriana TirisNo ratings yet
- Intelligent Vehicle Control Using Wireless Embedded System in Transportation System Based On GSM and GPS TechnologyDocument15 pagesIntelligent Vehicle Control Using Wireless Embedded System in Transportation System Based On GSM and GPS TechnologyJubin JainNo ratings yet
- Accident Prevention For Two Wheeler by Using Emerging TechnologiesDocument4 pagesAccident Prevention For Two Wheeler by Using Emerging TechnologiesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- 10 Vendors Providing Telematic Solutions: Moneysupermarket'Document3 pages10 Vendors Providing Telematic Solutions: Moneysupermarket'Abhishek MalhotraNo ratings yet
- IEEE BigData 2023 MM TrafficRiskDocument10 pagesIEEE BigData 2023 MM TrafficRiskcloudserviceuitNo ratings yet
- Almirah Mohammed: Name Netid Group Number: Website Link: Tutorial Details Time Spent On AssignmentDocument9 pagesAlmirah Mohammed: Name Netid Group Number: Website Link: Tutorial Details Time Spent On AssignmentalmirahmohNo ratings yet
- Vehicle Monitoring, Tracking and Accident Rescue System Using IOTDocument4 pagesVehicle Monitoring, Tracking and Accident Rescue System Using IOTSamuel LumbanrajaNo ratings yet
- DrowsinessDocument19 pagesDrowsiness4si21cv008No ratings yet
- Literature Survey 1Document7 pagesLiterature Survey 1raghul balaNo ratings yet
- MobilityDocument2 pagesMobilityRahulTiwariNo ratings yet
- Risks 10 00019Document13 pagesRisks 10 00019khalid khanNo ratings yet
- Accident Reporting and Notification System For Incidents Involving Motor VehiclesDocument25 pagesAccident Reporting and Notification System For Incidents Involving Motor VehiclesCentral Asian StudiesNo ratings yet
- EAI Endorsed Transactions: Surveillance and Black Box For CarDocument8 pagesEAI Endorsed Transactions: Surveillance and Black Box For CarDe PratamaNo ratings yet
- Driving Behavior Analysis For Smartphone-Based InsDocument7 pagesDriving Behavior Analysis For Smartphone-Based InsNit GossyNo ratings yet
- IJCRT2305006Document6 pagesIJCRT2305006Gayathri ANo ratings yet
- Smart Vehicle Service Management System Using IoTDocument9 pagesSmart Vehicle Service Management System Using IoTIJRASETPublicationsNo ratings yet
- Baron Telematics White PaperDocument7 pagesBaron Telematics White PaperArie SuryantokoNo ratings yet
- Feasibility Analysis of Driverless Car Using Vanets: 1.2 Google Driver Less CarDocument3 pagesFeasibility Analysis of Driverless Car Using Vanets: 1.2 Google Driver Less CarhrishikeshNo ratings yet
- 1 s2.0 S2665917423000570 MainDocument8 pages1 s2.0 S2665917423000570 MainnazalnavazNo ratings yet
- An Automated Approach To Driving Assistance and Accident DetectionDocument3 pagesAn Automated Approach To Driving Assistance and Accident DetectionInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Improved Crash Detection Algorithm For Vehicle Crash DetectionDocument7 pagesImproved Crash Detection Algorithm For Vehicle Crash Detection文升No ratings yet
- Using Smartphones To Detect Car Accidents and Provide Situational Awareness To Emergency RespondersDocument14 pagesUsing Smartphones To Detect Car Accidents and Provide Situational Awareness To Emergency RespondersSanthana KrishnanNo ratings yet
- Tomorrows Telematics For The Insurance IndustryDocument14 pagesTomorrows Telematics For The Insurance IndustryAdriana TirisNo ratings yet
- Application of Micro Controller in Vehicle Monitoring and Security SystemDocument6 pagesApplication of Micro Controller in Vehicle Monitoring and Security SystemEditor IJTSRDNo ratings yet
- Smart HelmetDocument27 pagesSmart Helmetguru prasadNo ratings yet
- A Novel Architecture For Authentication and Secure Communication in VANETDocument4 pagesA Novel Architecture For Authentication and Secure Communication in VANETseventhsensegroupNo ratings yet
- Acceptability of An Improvised Motorcycle Anti-Theft Security System With SMS and Call NotificationDocument9 pagesAcceptability of An Improvised Motorcycle Anti-Theft Security System With SMS and Call NotificationPsychology and Education: A Multidisciplinary JournalNo ratings yet
- Smart Vehicle Security System Using Fingerprint & GSM TechnologyDocument5 pagesSmart Vehicle Security System Using Fingerprint & GSM TechnologyBrightworld ProjectsNo ratings yet
- Violation Detection Method For Vehicular Ad HocDocument7 pagesViolation Detection Method For Vehicular Ad HocThuThao NguyenNo ratings yet
- B3. Helmet Drowsy DetectDocument86 pagesB3. Helmet Drowsy DetectRohith BanalaNo ratings yet
- Team 15 ProposalDocument9 pagesTeam 15 ProposalRozin CeausescuNo ratings yet
- IJRPR23443Document5 pagesIJRPR23443gorofa9108No ratings yet
- A New Leader in AI ResearchDocument2 pagesA New Leader in AI ResearchnitinrajinfyNo ratings yet
- The Industries in Which Artificial Intelligence Start-Ups Are Being FundedDocument2 pagesThe Industries in Which Artificial Intelligence Start-Ups Are Being Fundedabhishek nigamNo ratings yet
- Harnessing Artificial Intelligence: We Need New Rules To Avert Serious RisksDocument3 pagesHarnessing Artificial Intelligence: We Need New Rules To Avert Serious RisksnitinrajinfyNo ratings yet
- Machine Learning Methods Outperform GLMs in Pricing OptimizationDocument22 pagesMachine Learning Methods Outperform GLMs in Pricing OptimizationnitinrajinfyNo ratings yet
- Machine Learning Methods Outperform GLMs in Pricing OptimizationDocument22 pagesMachine Learning Methods Outperform GLMs in Pricing OptimizationnitinrajinfyNo ratings yet
- # Name Description 1 International JournalDocument6 pages# Name Description 1 International JournalnitinrajinfyNo ratings yet
- Ombudsman With Reference To in IdaDocument8 pagesOmbudsman With Reference To in IdanitinrajinfyNo ratings yet
- Court Invalidates Mortgage Due to Bank's Lack of DiligenceDocument10 pagesCourt Invalidates Mortgage Due to Bank's Lack of DiligenceTokie TokiNo ratings yet
- Director Infrastructure Technology Data Center in Atlanta GA Resume Thiron BarrDocument4 pagesDirector Infrastructure Technology Data Center in Atlanta GA Resume Thiron BarrThironBarrNo ratings yet
- CV (Muhammad Irfan Khan)Document3 pagesCV (Muhammad Irfan Khan)Niazi_sabNo ratings yet
- The 2012 FedEx Ketchum Social Business StudyDocument40 pagesThe 2012 FedEx Ketchum Social Business StudyEric PrenenNo ratings yet
- Bài tập Toán Cao Cấp - Tập 2 - Nguyễn Đình TríDocument272 pagesBài tập Toán Cao Cấp - Tập 2 - Nguyễn Đình TríMai Anh NguyễnNo ratings yet
- Nursing Grand Rounds Reviewer PDFDocument17 pagesNursing Grand Rounds Reviewer PDFAlyssa Jade GolezNo ratings yet
- Importance of Communication by ThiruvalluvarDocument7 pagesImportance of Communication by ThiruvalluvarRamavallabhanNo ratings yet
- Total Standards: - Total Sub-Standards: - Total ESR StandardsDocument8 pagesTotal Standards: - Total Sub-Standards: - Total ESR StandardsHCX dghhqNo ratings yet
- Personal Styling Service-Contract - No WatermarkDocument5 pagesPersonal Styling Service-Contract - No WatermarkLexine Emille100% (1)
- Contradictions That Drive Toyota's SuccessDocument7 pagesContradictions That Drive Toyota's SuccesskidurexNo ratings yet
- Part 1 LEA 4 Law Enforcement Operations and Planning With Crime MappingDocument94 pagesPart 1 LEA 4 Law Enforcement Operations and Planning With Crime Mappingyomaeko CinkoNo ratings yet
- Tipster Job AdvertDocument3 pagesTipster Job AdvertDatateq ConsultancyNo ratings yet
- Upliftment of Recto AveDocument6 pagesUpliftment of Recto AveFrance CortezanoNo ratings yet
- TD102 Conductor - Standard ConductorsDocument2 pagesTD102 Conductor - Standard ConductorsHFandino1No ratings yet
- HACCP Plan With Flow Chart-1Document23 pagesHACCP Plan With Flow Chart-1Anonymous aZA07k8TXfNo ratings yet
- PKG Materials Standards IIP A A JoshiDocument45 pagesPKG Materials Standards IIP A A JoshiDeepak VermaNo ratings yet
- Dhaka Epz Factory List & List of Inspected Factories by EIMS For AllianceDocument12 pagesDhaka Epz Factory List & List of Inspected Factories by EIMS For Alliancearman chowdhury100% (4)
- Binders For: Architectural CoatingsDocument8 pagesBinders For: Architectural CoatingsAPEX SON100% (1)
- Analysis and Design of BeamsDocument12 pagesAnalysis and Design of BeamsHasanain AlmusawiNo ratings yet
- Template Research ProjectDocument13 pagesTemplate Research ProjectTuấn Anh Đoàn CôngNo ratings yet
- Houghton Mifflin Harcourt Sap Document of UnderstandingDocument10 pagesHoughton Mifflin Harcourt Sap Document of UnderstandingSunil KumarNo ratings yet
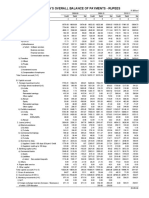
- Table 141: India'S Overall Balance of Payments - RupeesDocument2 pagesTable 141: India'S Overall Balance of Payments - Rupeesmahbobullah rahmaniNo ratings yet
- Ligot v. MathayDocument1 pageLigot v. MathayJoyce BaylonNo ratings yet
- Crestron Teams HardeningDocument20 pagesCrestron Teams HardeningmanishNo ratings yet
- B.Tech Digital Principles and System Design Exam Question BankDocument24 pagesB.Tech Digital Principles and System Design Exam Question Bankdigital1206No ratings yet
- DSRD Ar05Document132 pagesDSRD Ar05djon888No ratings yet
- Written Report Maneco FinalDocument31 pagesWritten Report Maneco FinalKymicah DesiertoNo ratings yet
- Theory of Planned Behaviour (TPB)Document18 pagesTheory of Planned Behaviour (TPB)Afiq Wahyu AjiNo ratings yet
- High-Energy Fuels For Cruise MissilesDocument4 pagesHigh-Energy Fuels For Cruise Missilesgrindormh53No ratings yet
- Elite Physics G10 T2 SLA1Document7 pagesElite Physics G10 T2 SLA1thecubeg0No ratings yet