You might also like
- Power Systems Modelling and Fault Analysis: Theory and PracticeFrom EverandPower Systems Modelling and Fault Analysis: Theory and PracticeRating: 2 out of 5 stars2/5 (1)
- PWM Inverter ThesisDocument5 pagesPWM Inverter Thesisfc33r464100% (2)
- Control of Voltage Source Inverters Using PWMDocument48 pagesControl of Voltage Source Inverters Using PWMManohar DakaNo ratings yet
- Automated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsFrom EverandAutomated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsNo ratings yet
- 01-RH124 Red Hat System Administration IIDocument4 pages01-RH124 Red Hat System Administration IIpimentel-diogo2056No ratings yet
- AS7004862734868671544020350905 Content 1Document7 pagesAS7004862734868671544020350905 Content 1Mylavarapu SriprithamNo ratings yet
- IJAS - Volume 12 - Issue 3 - Pages 484-489Document6 pagesIJAS - Volume 12 - Issue 3 - Pages 484-489aditya317crazyNo ratings yet
- Advanced Drive System For DC Motor Using Multilevel DC/DC Buck Converter CircuitDocument13 pagesAdvanced Drive System For DC Motor Using Multilevel DC/DC Buck Converter CircuitShivaram H GNo ratings yet
- Performance Enhancement of DCMLI Fed DTC-PMSM Drive in Electric VehicleDocument16 pagesPerformance Enhancement of DCMLI Fed DTC-PMSM Drive in Electric VehiclevawihNo ratings yet
- 2 15 1417426934 7.electrical IJEEER MATLABSIMULINKIMPLEMENTATIONAND KavitaNagarDocument13 pages2 15 1417426934 7.electrical IJEEER MATLABSIMULINKIMPLEMENTATIONAND KavitaNagarAbdullah Al MamunNo ratings yet
- An Investigation On The Performance of Random PWM Controlled ConvertersDocument10 pagesAn Investigation On The Performance of Random PWM Controlled ConvertersALiftsNo ratings yet
- Electric Vehicle Speed Control Using Three Phase Inverter Operated by DSP-based Space Vector Pulse Width Modulation TechniqueDocument8 pagesElectric Vehicle Speed Control Using Three Phase Inverter Operated by DSP-based Space Vector Pulse Width Modulation TechniqueCuriosityShopNo ratings yet
- A209 PDFDocument8 pagesA209 PDFCuriosityShopNo ratings yet
- AUPEC 2020 Shuvra FinalDocument7 pagesAUPEC 2020 Shuvra FinalAK KhanNo ratings yet
- Ieee 2012Document6 pagesIeee 2012sunnyNo ratings yet
- IEEE Um Artigo ExDocument9 pagesIEEE Um Artigo Exrod8silvaNo ratings yet
- Modeling and Simulation of 6-Pulse Rectifier Drives With PDFDocument6 pagesModeling and Simulation of 6-Pulse Rectifier Drives With PDFSunil KumarNo ratings yet
- Performance and Analysis of Four SwitchDocument4 pagesPerformance and Analysis of Four SwitchKajendranNo ratings yet
- Research Paper A Novel Method For Near State Pulse Width Modulation (NSPWM) Based Chopper DrivesDocument4 pagesResearch Paper A Novel Method For Near State Pulse Width Modulation (NSPWM) Based Chopper Drivesdivyamanikandan007No ratings yet
- Matrix ConvertersDocument14 pagesMatrix ConverterssuccesskandhanNo ratings yet
- Design and Simulation of Programmable AC-DC Converter Using Pulse Width Modulation (PWM) Techniques in MATLABDocument5 pagesDesign and Simulation of Programmable AC-DC Converter Using Pulse Width Modulation (PWM) Techniques in MATLABJeannot MpianaNo ratings yet
- A Review: Speed Control of Brushless DC Motor: December 2017Document7 pagesA Review: Speed Control of Brushless DC Motor: December 2017Gopu MayyalaNo ratings yet
- Solar PV Array Based Water Pumping by Using SRM Drive: A ReviewDocument7 pagesSolar PV Array Based Water Pumping by Using SRM Drive: A Reviewpushpit SuriNo ratings yet
- Engineering Science and Technology, An International JournalDocument11 pagesEngineering Science and Technology, An International JournalMuhammad RizkyNo ratings yet
- 12.quantitative Power QualityDocument10 pages12.quantitative Power QualitySanthosh GuduruNo ratings yet
- Hybrid Passive Filter Design - 2007Document6 pagesHybrid Passive Filter Design - 2007Rizqy Capten Tsubasa OzoraNo ratings yet
- Control of SRM Using 3-Level Neutral Point Diode Clamped Converter With PI and Fuzzy ControllerDocument7 pagesControl of SRM Using 3-Level Neutral Point Diode Clamped Converter With PI and Fuzzy ControllerHarsha VardhanNo ratings yet
- Performance - Comparison EV ApplnDocument15 pagesPerformance - Comparison EV Applnmanoish07No ratings yet
- Arduino Based V/F Drive For A Three Phase Induction Motor Using Single Phase SupplyDocument6 pagesArduino Based V/F Drive For A Three Phase Induction Motor Using Single Phase SupplyRai Nazer Hussain KharlNo ratings yet
- Power Quality Enhancement Using Current Injection Technique in A Zigzag Configured Autotransformer Based 12-Pulse RectifierDocument11 pagesPower Quality Enhancement Using Current Injection Technique in A Zigzag Configured Autotransformer Based 12-Pulse RectifierAbdul QayyumNo ratings yet
- Labview-Ni Elvis Ii Based Speed Control of DC MotorDocument4 pagesLabview-Ni Elvis Ii Based Speed Control of DC MotorDamir MiletaNo ratings yet
- Chapter 2 NewDocument11 pagesChapter 2 NewKyaw SoeNo ratings yet
- Modulation Techniques For Matrix ConvertersDocument7 pagesModulation Techniques For Matrix Convertersdheerajkumar02527289No ratings yet
- Ijert Ijert: Three Phase Parallel Multilevel Inverter Fed Induction Motor Using PD Modulation SchemeDocument4 pagesIjert Ijert: Three Phase Parallel Multilevel Inverter Fed Induction Motor Using PD Modulation SchemeR.SRIKANTHNo ratings yet
- Analysis and Implementation of Power Quality Improvement Using VSC Based DSTATCOM Distribution Static CompensatorDocument8 pagesAnalysis and Implementation of Power Quality Improvement Using VSC Based DSTATCOM Distribution Static CompensatorEditor IJTSRDNo ratings yet
- Technical Paper Presentation of FPGA Based SVM ControllerDocument5 pagesTechnical Paper Presentation of FPGA Based SVM ControllerShiva Prasad MNo ratings yet
- A Novel of LCL Filter Base Three Phase Inverter For Renewable Energy ApplicationsDocument4 pagesA Novel of LCL Filter Base Three Phase Inverter For Renewable Energy ApplicationsProf. Rajendra AparnathiNo ratings yet
- Ijiset V2 I12 03Document8 pagesIjiset V2 I12 03Likhitha YerraNo ratings yet
- Vs 2017Document10 pagesVs 2017martin.teruelNo ratings yet
- Paper 9Document5 pagesPaper 9SanthoshNo ratings yet
- JP 2Document17 pagesJP 2evansejegiNo ratings yet
- Four-Module Three-Phase PMSM Drive For Suppressing Vibration and Common-Mode CurrentDocument10 pagesFour-Module Three-Phase PMSM Drive For Suppressing Vibration and Common-Mode CurrentTushar NistaneNo ratings yet
- DC Motor Speed Control Using Microcontroller: AbstractDocument5 pagesDC Motor Speed Control Using Microcontroller: AbstractGabi CiobanuNo ratings yet
- Calculation of Total Current Harmonic Distortion by PWM Method For Permanent Magnet Synchronous MotorsDocument4 pagesCalculation of Total Current Harmonic Distortion by PWM Method For Permanent Magnet Synchronous MotorsShakeel RanaNo ratings yet
- Power Quality Improvement in Modified Solid State Transformer System Using StatcomDocument6 pagesPower Quality Improvement in Modified Solid State Transformer System Using StatcomdevchandarNo ratings yet
- Technical IntroDocument10 pagesTechnical IntroThesis IndiaNo ratings yet
- Design of Multi-Level Inverter and Its Application As Statcom To Compensate Voltage Sags Due To FaultsDocument6 pagesDesign of Multi-Level Inverter and Its Application As Statcom To Compensate Voltage Sags Due To FaultsManpreet SinghNo ratings yet
- Application Characteristics of Permanent Magnet Synchronous Motors (Case Study)Document6 pagesApplication Characteristics of Permanent Magnet Synchronous Motors (Case Study)RakeshconclaveNo ratings yet
- 53e9aeabb7602d97038d1360 0Document13 pages53e9aeabb7602d97038d1360 0Sung Ryoung LimNo ratings yet
- Application of SRF-PI Current Control in The Design of A Single-Phase Asymmetrical Inverter For Use in Weak Grid EnvironmentsDocument17 pagesApplication of SRF-PI Current Control in The Design of A Single-Phase Asymmetrical Inverter For Use in Weak Grid EnvironmentsResearch ParkNo ratings yet
- Prototyping Approach To Neuro-Fuzzy Speed Control of Trapezoidal Brushless DC MotorDocument6 pagesPrototyping Approach To Neuro-Fuzzy Speed Control of Trapezoidal Brushless DC MotorJournal of ComputingNo ratings yet
- Analysis and Design of A Low-Voltage Low-Power Double-Tail ComparatorDocument10 pagesAnalysis and Design of A Low-Voltage Low-Power Double-Tail ComparatorKiran KNo ratings yet
- Analysis and Design of Three-Phase AC-to-DC Converters With High Power Factor and Near-Optimum FeedforwardDocument10 pagesAnalysis and Design of Three-Phase AC-to-DC Converters With High Power Factor and Near-Optimum FeedforwardTalha SadiqNo ratings yet
- IJETR031989Document5 pagesIJETR031989erpublicationNo ratings yet
- Fan Yi, Student Member, IEEE, and Wen Cai, Student Member, IEEEDocument13 pagesFan Yi, Student Member, IEEE, and Wen Cai, Student Member, IEEEMarcelo Vinicius de PaulaNo ratings yet
- A Review Paper On Torque Ripple Reduction and Power Quality Improvement in Brushless DC Motor PDFDocument9 pagesA Review Paper On Torque Ripple Reduction and Power Quality Improvement in Brushless DC Motor PDFsethukumarkNo ratings yet
- 54 1514364856 - 27-12-2017 PDFDocument5 pages54 1514364856 - 27-12-2017 PDFAnonymous lPvvgiQjRNo ratings yet
- BLDC Motor Drive PDFDocument83 pagesBLDC Motor Drive PDFrijilpoothadi100% (1)
- Power Quality Improvement of PMSG Based DG Set Feeding Three-Phase LoadsDocument6 pagesPower Quality Improvement of PMSG Based DG Set Feeding Three-Phase LoadsHitesh JoshiNo ratings yet
- Power Systems-On-Chip: Practical Aspects of DesignFrom EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNo ratings yet
- CySA+ Study Guide PublicDocument61 pagesCySA+ Study Guide Publicmailbox4vivekNo ratings yet
- Printed Circuit Boards Designing and Its Fabrication MethodsDocument54 pagesPrinted Circuit Boards Designing and Its Fabrication MethodsZaryab QaziNo ratings yet
- M4a785td-M EvoDocument64 pagesM4a785td-M EvoBuba MaraNo ratings yet
- Senior Network Administrator at IT Infrastructure Department - Banka Kombetare Tregtare BKTDocument3 pagesSenior Network Administrator at IT Infrastructure Department - Banka Kombetare Tregtare BKTKledjan hariziNo ratings yet
- Information Security: Security Tools Presented By: Dr. F. N MusauDocument23 pagesInformation Security: Security Tools Presented By: Dr. F. N Musausteng5050No ratings yet
- Datasheet Copper SFPDocument5 pagesDatasheet Copper SFPaauniNo ratings yet
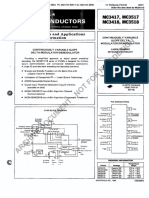
- IC - MC3417 - MC3418 - DatasheetsDocument20 pagesIC - MC3417 - MC3418 - Datasheetsmnolasco2009No ratings yet
- SLES4SAP Hana SR Guide PerfOpt 15 - Color - enDocument95 pagesSLES4SAP Hana SR Guide PerfOpt 15 - Color - enOscar Fabian Ortiz VelayarceNo ratings yet
- BME311 A - Laboratory Assignment 3Document6 pagesBME311 A - Laboratory Assignment 3Margret DequitoNo ratings yet
- Inverter Systems: For Gen 3 Drives of HEIDENHAIN ControlsDocument59 pagesInverter Systems: For Gen 3 Drives of HEIDENHAIN ControlsSir StigaNo ratings yet
- FSDL0365RN, FSDM0365RN: Green Mode Fairchild Power Switch (FPS)Document20 pagesFSDL0365RN, FSDM0365RN: Green Mode Fairchild Power Switch (FPS)Andi Awal JanwarNo ratings yet
- Midokura - Back End EngineerDocument3 pagesMidokura - Back End EngineerzentropiaNo ratings yet
- Ghost ErrDocument3 pagesGhost ErrMuhammad Armin IrawanNo ratings yet
- Digital Temperature Controllers: Model Number StructureDocument5 pagesDigital Temperature Controllers: Model Number StructureYandi HidayatNo ratings yet
- OCZ SSD v1.7 Firmware Update GuideDocument4 pagesOCZ SSD v1.7 Firmware Update GuideDarrol WernetNo ratings yet
- 10 - 1 PID ControllersDocument36 pages10 - 1 PID ControllersShilpya KurniasihNo ratings yet
- Creating A Splash Screen in Delphi ApplicationsDocument11 pagesCreating A Splash Screen in Delphi Applicationspaolo sandovalNo ratings yet
- 2223-1 Assignment 5 at KE17503Document5 pages2223-1 Assignment 5 at KE17503STACEYLEEN CYENTHIA LADIUN BK22110177No ratings yet
- Put Get s7-1200 enDocument14 pagesPut Get s7-1200 enRaul GonzalezNo ratings yet
- 30 M 305Document2 pages30 M 305vijaya shanthiNo ratings yet
- Lesson 1: Computer: Systems DesignDocument16 pagesLesson 1: Computer: Systems DesignChanchan LebumfacilNo ratings yet
- AccurioPro Flux Essential Output Management DATASHEET PDFDocument4 pagesAccurioPro Flux Essential Output Management DATASHEET PDFKarol WolańskiNo ratings yet
- CML To Cmos 2Document4 pagesCML To Cmos 2Zyad IskandarNo ratings yet
- BC0040 Computer Organization and Architecture Paper 2Document15 pagesBC0040 Computer Organization and Architecture Paper 2SeekEducationNo ratings yet
- Flex Reverb Users Manual 2023-1Document7 pagesFlex Reverb Users Manual 2023-1yaodongliang9No ratings yet
- FI01 en Kap03Document118 pagesFI01 en Kap03pvalverdea2014No ratings yet
- 10 EMI 04 The PIC Micro ControllerDocument20 pages10 EMI 04 The PIC Micro Controllerapi-3707706100% (1)
- Android Cts Manual r4Document16 pagesAndroid Cts Manual r4TeeJay O'ConnorNo ratings yet
- DS 0806 ProximVision USHRDocument4 pagesDS 0806 ProximVision USHRamilperNo ratings yet