You might also like
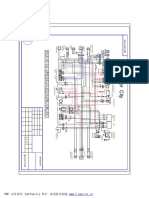
- Cpi Oliver City EldiagramDocument1 pageCpi Oliver City EldiagramHenry BraunNo ratings yet
- RNP ApproachesDocument69 pagesRNP Approachesvetsa73783% (6)
- CLC CCIE Security v6.0 Practice Lab v3.0Document86 pagesCLC CCIE Security v6.0 Practice Lab v3.0R1100% (1)
- 997 Technical ManualDocument209 pages997 Technical Manualemmanuel geurtsNo ratings yet
- Cooling Water Treatment PDFDocument2 pagesCooling Water Treatment PDFvjNo ratings yet
- Case Control StudyDocument6 pagesCase Control StudyAndre ChundawanNo ratings yet
- Engineering Specification: ESFU5A-8079-AADocument5 pagesEngineering Specification: ESFU5A-8079-AAjavier ortizNo ratings yet
- 08RNP Approach PBN V1 - 2Document29 pages08RNP Approach PBN V1 - 2R. AstridNo ratings yet
- 12ChartingPBN V1 - 2Document55 pages12ChartingPBN V1 - 2R. AstridNo ratings yet
- Departure Criteria: Beijing Dec 2007 - Performance Based Navigation CourseDocument39 pagesDeparture Criteria: Beijing Dec 2007 - Performance Based Navigation CourseR. AstridNo ratings yet
- Avionics: Beijing December 2007Document53 pagesAvionics: Beijing December 2007R. AstridNo ratings yet
- Avionics: Beijing December 2007Document53 pagesAvionics: Beijing December 2007R. AstridNo ratings yet
- PBN ConceptDocument39 pagesPBN ConceptKha Trấn ÁcNo ratings yet
- 04 PBN GNSS ICAO SARPS and DOCs On NAV Infra To Support PBN - SubmitDocument25 pages04 PBN GNSS ICAO SARPS and DOCs On NAV Infra To Support PBN - SubmitMargaret MeporoNo ratings yet
- Introduction To PBN and RNP Eurocontrol PDFDocument31 pagesIntroduction To PBN and RNP Eurocontrol PDFLuiz Barcellos100% (5)
- PBN Operations BAT2021-2022Document4 pagesPBN Operations BAT2021-2022Kimbigi225No ratings yet
- B. What Is PBN Greg PerrisDocument41 pagesB. What Is PBN Greg PerrisDiego Alborch GarciaNo ratings yet
- Fast R-CNN (2015) - GirshickDocument9 pagesFast R-CNN (2015) - GirshickBartoszSowulNo ratings yet
- Performance Based Navigation: RNP and RNP Ar Approaches: Matthias MaederDocument5 pagesPerformance Based Navigation: RNP and RNP Ar Approaches: Matthias MaederJerome Cardenas TablacNo ratings yet
- 5G Transport SolutionDocument35 pages5G Transport SolutionMD. SHEFAUL KARIMNo ratings yet
- Single Site Verification ReportDocument24 pagesSingle Site Verification ReportVũ Quốc OaiNo ratings yet
- Atr 600 STD 2Document4 pagesAtr 600 STD 2rlarruyNo ratings yet
- EURO - Guidance Material For RNAV DesignDocument217 pagesEURO - Guidance Material For RNAV DesignmusaharahmadNo ratings yet
- P-Rnav ChecklistDocument1 pageP-Rnav ChecklistVito GentileNo ratings yet
- RECLOSERDocument39 pagesRECLOSER22142283No ratings yet
- CANopen TelemecaniqueDocument61 pagesCANopen Telemecaniquefgesbert.atomsNo ratings yet
- VSP Seismic OkDocument11 pagesVSP Seismic OkAlfi CahyaNo ratings yet
- HCIE Knowledge PointsDocument147 pagesHCIE Knowledge Pointslotfi jemliNo ratings yet
- 2013 Introducing PBN A RNP PDFDocument20 pages2013 Introducing PBN A RNP PDFChristiano SantosNo ratings yet
- 3.RNAV-Visual Procedures-Egypt PDFDocument17 pages3.RNAV-Visual Procedures-Egypt PDFAlex KashulNo ratings yet
- Case Study 2gDocument15 pagesCase Study 2gRAMPRASATHNo ratings yet
- LI BB Sensitivity & Satability Test Report Rev NEW FORMDocument5 pagesLI BB Sensitivity & Satability Test Report Rev NEW FORMRK KNo ratings yet
- Dwacth2 PDFDocument10 pagesDwacth2 PDFEdgar DespiNo ratings yet
- UE GNB UE GNB AMF: User Plane Protocol Stack Control Plane Protocol StackDocument10 pagesUE GNB UE GNB AMF: User Plane Protocol Stack Control Plane Protocol StackVishal VenkataNo ratings yet
- 5G QoS ConceptDocument10 pages5G QoS ConceptSourub KushwahNo ratings yet
- Aic-A 26-20 20200813Document9 pagesAic-A 26-20 20200813Alessandro Ale BrandaoNo ratings yet
- Performance Based Navigation - PBN: Course OutlinesDocument14 pagesPerformance Based Navigation - PBN: Course OutlinesguineasorinNo ratings yet
- A 3Document43 pagesA 3BFBGFDNo ratings yet
- How Is RNP (Or PBN - Performance Based Navigation) Is Different From RNAV (Area Navigation) - Aviation ThrustDocument3 pagesHow Is RNP (Or PBN - Performance Based Navigation) Is Different From RNAV (Area Navigation) - Aviation ThrustZenglei LiNo ratings yet
- Performance Based Navigation: The ICAO PBN ProgrammeDocument35 pagesPerformance Based Navigation: The ICAO PBN ProgrammeDawood waheedNo ratings yet
- Large-Scale Semiconductor Process Fault Detection Using A Fast Pattern Recognition-Based MethodDocument7 pagesLarge-Scale Semiconductor Process Fault Detection Using A Fast Pattern Recognition-Based MethodRoslin LuNo ratings yet
- 05 Introduction To PBNDocument60 pages05 Introduction To PBNAgastia imranNo ratings yet
- Quantum Espresso TutorialDocument23 pagesQuantum Espresso TutorialCarla Vieira SoaresNo ratings yet
- Factsheet RNP ApproachesDocument2 pagesFactsheet RNP ApproachesAbdulmalekNo ratings yet
- Welcome To Future Air Navigation System: PBN/RNPDocument35 pagesWelcome To Future Air Navigation System: PBN/RNPAuliya NurullahNo ratings yet
- Global Navigation Requires Global StandardsDocument28 pagesGlobal Navigation Requires Global StandardsThư MinhNo ratings yet
- Performance Based Navigation1Document5 pagesPerformance Based Navigation1Konstantinos GlynisNo ratings yet
- 5g Nsa Access Trouble ShootingDocument10 pages5g Nsa Access Trouble ShootingPsi Factors100% (1)
- P122 87B2 B Test Report Rev 1Document9 pagesP122 87B2 B Test Report Rev 1sherub wangdiNo ratings yet
- This Document Is Downloaded From DR-NTU, Nanyang Technological University Library, SingaporeDocument10 pagesThis Document Is Downloaded From DR-NTU, Nanyang Technological University Library, SingaporeRavinder KumarNo ratings yet
- Department of Electronics and Communication Engineering: Subject: Vlsi Signal ProcessingDocument8 pagesDepartment of Electronics and Communication Engineering: Subject: Vlsi Signal ProcessingRaja PirianNo ratings yet
- RNP Aproach: Types of ApproachesDocument8 pagesRNP Aproach: Types of ApproachesVibhore Kumar SainiNo ratings yet
- Solve Cavitating Flow Around A 2D Hydrofoil With Inter Phase Change FoamDocument13 pagesSolve Cavitating Flow Around A 2D Hydrofoil With Inter Phase Change FoamAghajaniNo ratings yet
- CCNP ROUTE (Version 7)Document36 pagesCCNP ROUTE (Version 7)iandomsNo ratings yet
- WEST - QURNA-2 - GTPP - PHASE - 2 - LC-3 - LC-4 - Prot Coord Report - 20230922 - 024801Document13 pagesWEST - QURNA-2 - GTPP - PHASE - 2 - LC-3 - LC-4 - Prot Coord Report - 20230922 - 024801kohgilozadehkazemNo ratings yet
- On Pilot Symbol Assisted Carrier SynchroDocument8 pagesOn Pilot Symbol Assisted Carrier Synchrohemantgarg2001No ratings yet
- 02-MPAR. Symposium. PresentationDocument22 pages02-MPAR. Symposium. PresentationManasvi MehtaNo ratings yet
- Cisco 5G TransportDocument30 pagesCisco 5G TransportDaniel CafuNo ratings yet
- E.inspector SARADocument8 pagesE.inspector SARAMilad VaheduNo ratings yet
- 5G Air Interface Non-Standalone OperationDocument6 pages5G Air Interface Non-Standalone OperationSoumyaranjan BeheraNo ratings yet
- Flexi-Binning Vs Prestack Interpolation, Sinha, 2008Document6 pagesFlexi-Binning Vs Prestack Interpolation, Sinha, 2008Al-Javibi BiNo ratings yet
- Computer Programs for ChemistryFrom EverandComputer Programs for ChemistryDeLos DeTarNo ratings yet
- Seabed Seismic Techniques: QC and Data Processing KeysFrom EverandSeabed Seismic Techniques: QC and Data Processing KeysRating: 5 out of 5 stars5/5 (2)
- 12ChartingPBN V1 - 2Document55 pages12ChartingPBN V1 - 2R. AstridNo ratings yet
- Avionics: Beijing December 2007Document53 pagesAvionics: Beijing December 2007R. AstridNo ratings yet
- Departure Criteria: Beijing Dec 2007 - Performance Based Navigation CourseDocument39 pagesDeparture Criteria: Beijing Dec 2007 - Performance Based Navigation CourseR. AstridNo ratings yet
- 08RNP Approach PBN V1 - 2Document29 pages08RNP Approach PBN V1 - 2R. AstridNo ratings yet
- Avionics: Beijing December 2007Document53 pagesAvionics: Beijing December 2007R. AstridNo ratings yet
- Modelling Issues in Vision Based Aircraft Navigation During LandingDocument8 pagesModelling Issues in Vision Based Aircraft Navigation During LandingR. AstridNo ratings yet
- Instruction Manual AVTM246100B For Battery Ground Fault TracerDocument44 pagesInstruction Manual AVTM246100B For Battery Ground Fault TracerRovi ElecNo ratings yet
- Herbicide and Formulation PDFDocument760 pagesHerbicide and Formulation PDFajengNo ratings yet
- Bromus Inermis: Jump To Navigationjump To Search BromusDocument3 pagesBromus Inermis: Jump To Navigationjump To Search BromusKevin VillanuevaNo ratings yet
- Transit System Guide MapDocument2 pagesTransit System Guide Mapzhu xdNo ratings yet
- RoboticsbasicDocument52 pagesRoboticsbasicdanvicNo ratings yet
- Oxygen Concentrator 7F-5 User's ManualDocument9 pagesOxygen Concentrator 7F-5 User's ManualJunx TripoliNo ratings yet
- PDF A Gentle Course in Local Class Field Theory Local Number Fields Brauer Groups Galois Cohomology 1St Edition Pierre Guillot Ebook Full ChapterDocument54 pagesPDF A Gentle Course in Local Class Field Theory Local Number Fields Brauer Groups Galois Cohomology 1St Edition Pierre Guillot Ebook Full Chapterdaphne.szymanski787100% (6)
- Case of Paper BoatDocument11 pagesCase of Paper BoatAshiqnavaz ShaikhNo ratings yet
- AEC Parameters For CRDocument4 pagesAEC Parameters For CRLuis Alberto Díaz OlmedoNo ratings yet
- CH 5 MatlabDocument77 pagesCH 5 MatlabAqib AliNo ratings yet
- WB - Soft Drinks in 2021 - New WellbeingDocument18 pagesWB - Soft Drinks in 2021 - New WellbeingalexmgbNo ratings yet
- Module 2. Classification and Selection of InstrumentsDocument5 pagesModule 2. Classification and Selection of InstrumentsAmit Kr GodaraNo ratings yet
- Atex Directive in A NutshellDocument4 pagesAtex Directive in A NutshellAnonymous 96SYLheENo ratings yet
- Severe Erythroderma Secondary To Permanent Pacemaker AllergyDocument23 pagesSevere Erythroderma Secondary To Permanent Pacemaker AllergyJulian LeeNo ratings yet
- Ime56350g 2 Felcom15Document51 pagesIme56350g 2 Felcom15SergeyNo ratings yet
- Capítulo 11 SerdevDocument19 pagesCapítulo 11 SerdevErik BrooksNo ratings yet
- The Thai Spirit House: by Marisa Cranfill YoungDocument2 pagesThe Thai Spirit House: by Marisa Cranfill Youngsian017No ratings yet
- BS en 01793-3-1998 PDFDocument6 pagesBS en 01793-3-1998 PDFNayan jainNo ratings yet
- Jsa For Inst. of TSF & Laydown AreaDocument23 pagesJsa For Inst. of TSF & Laydown AreaAshir RIZNo ratings yet
- Intech Brachytherapy Shielding Materials Guide 2021-01Document3 pagesIntech Brachytherapy Shielding Materials Guide 2021-01Kevin DrummNo ratings yet
- Chapters 1, 2 & 6Document95 pagesChapters 1, 2 & 6Mwizukanji NakambaNo ratings yet
- Ermias TamiruDocument119 pagesErmias TamiruAli HassenNo ratings yet
- DIC Based Stress AnalysisDocument17 pagesDIC Based Stress AnalysisAdarsh PNo ratings yet
- FlexScan UserGuide FS200-00-1000Document51 pagesFlexScan UserGuide FS200-00-1000GreciaNo ratings yet
- GCXGC PaperDocument11 pagesGCXGC PaperCristian Daniel Quiroz MorenoNo ratings yet