You might also like
- Taylor Pipe SupportsDocument3 pagesTaylor Pipe SupportsHoon MiewJieNo ratings yet
- 500 600 Ignition Temperature of Gas Surface Temperature of ApparatusDocument1 page500 600 Ignition Temperature of Gas Surface Temperature of ApparatusHoon MiewJieNo ratings yet
- Classification of Flammable Gases and Dusts in Groups: Europe/IEC North America Min. Ignition Energy ExamplesDocument1 pageClassification of Flammable Gases and Dusts in Groups: Europe/IEC North America Min. Ignition Energy ExamplesHoon MiewJieNo ratings yet
- Taylor Pipe SupportsDocument6 pagesTaylor Pipe SupportsHoon MiewJieNo ratings yet
- Extracted Pages From 2022 - ESAH - 3.1Document1 pageExtracted Pages From 2022 - ESAH - 3.1Hoon MiewJieNo ratings yet
- Ignition Temperature - Surface Temperature: Fuels ApparatusDocument1 pageIgnition Temperature - Surface Temperature: Fuels ApparatusHoon MiewJieNo ratings yet
- Classification of Flammable Gases, Vapors, Mists: Hot Surface SparksDocument1 pageClassification of Flammable Gases, Vapors, Mists: Hot Surface SparksHoon MiewJieNo ratings yet
- Equipment Classification According To ATEXDocument1 pageEquipment Classification According To ATEXHoon MiewJieNo ratings yet
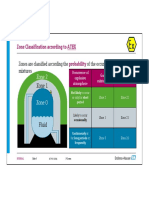
- Zone Classification According To ATEX ProbabilityDocument1 pageZone Classification According To ATEX ProbabilityHoon MiewJieNo ratings yet
- Equipment Group - ATEXDocument1 pageEquipment Group - ATEXHoon MiewJieNo ratings yet
- Equipment Classification According To IECDocument1 pageEquipment Classification According To IECHoon MiewJieNo ratings yet
- Ex-Linear Light Fitting With Metal Housing For Surface MountingDocument6 pagesEx-Linear Light Fitting With Metal Housing For Surface MountingHoon MiewJieNo ratings yet
- Equipment Designation To Zones: EPL Equipment Protection LevelDocument1 pageEquipment Designation To Zones: EPL Equipment Protection LevelHoon MiewJieNo ratings yet
- 1vap428831-Db SCBDocument4 pages1vap428831-Db SCBHoon MiewJieNo ratings yet
- Motors and Loads: 3.3 Synchronous Motors 3.4 Direct Current Motors Commonly Named DC MotorsDocument1 pageMotors and Loads: 3.3 Synchronous Motors 3.4 Direct Current Motors Commonly Named DC MotorsHoon MiewJieNo ratings yet
- Asg 3 Motors and Loads 9Document1 pageAsg 3 Motors and Loads 9Hoon MiewJieNo ratings yet
- Asg-3-Motors-And-Loads 8Document1 pageAsg-3-Motors-And-Loads 8Hoon MiewJieNo ratings yet
- Asg 3 Motors and Loads 8Document1 pageAsg 3 Motors and Loads 8Hoon MiewJieNo ratings yet
- Asg-3-Motors-And-Loads 7Document1 pageAsg-3-Motors-And-Loads 7Hoon MiewJieNo ratings yet
- Motors and Loads: 3.1 Three Phase Asynchronous MotorsDocument1 pageMotors and Loads: 3.1 Three Phase Asynchronous MotorsHoon MiewJieNo ratings yet
- Motors and Loads: 3.1 Three Phase Asynchronous MotorsDocument1 pageMotors and Loads: 3.1 Three Phase Asynchronous MotorsHoon MiewJieNo ratings yet
- Asg-3-Motors-And-Loads 1Document1 pageAsg-3-Motors-And-Loads 1Hoon MiewJieNo ratings yet
- Asg 3 Motors and Loads 2Document1 pageAsg 3 Motors and Loads 2Hoon MiewJieNo ratings yet
- Asg 3 Motors and Loads 2Document1 pageAsg 3 Motors and Loads 2Hoon MiewJieNo ratings yet
- Asg 3 Motors and Loads 9Document1 pageAsg 3 Motors and Loads 9Hoon MiewJieNo ratings yet
- Asg 3 Motors and Loads 8Document1 pageAsg 3 Motors and Loads 8Hoon MiewJieNo ratings yet
- Motors and Loads: 3.1 Three Phase Asynchronous MotorsDocument1 pageMotors and Loads: 3.1 Three Phase Asynchronous MotorsHoon MiewJieNo ratings yet
- Asg-3-Motors-And-Loads 1Document1 pageAsg-3-Motors-And-Loads 1Hoon MiewJieNo ratings yet
- Copy Part1Document1 pageCopy Part1Hoon MiewJieNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- 777rsec3 PDFDocument36 pages777rsec3 PDFAlexander Ponce VelardeNo ratings yet
- 3.3 Cell MembraneDocument19 pages3.3 Cell MembraneHanaa WazzanNo ratings yet
- NS-3 With Ndnsim Patch - TutorialDocument8 pagesNS-3 With Ndnsim Patch - TutorialAli NawazNo ratings yet
- NEBULIZATIONDocument2 pagesNEBULIZATIONMae ValenzuelaNo ratings yet
- PNAPDocument79 pagesPNAPYu chung yinNo ratings yet
- AP Physics 1 Practice Test 2 Answer ExplanationsDocument14 pagesAP Physics 1 Practice Test 2 Answer Explanations장준오No ratings yet
- Applications & Tools: Prevention of Overload Using "CPU - RT"Document22 pagesApplications & Tools: Prevention of Overload Using "CPU - RT"Jeronimo JeronimoNo ratings yet
- INST240 Sec4Document127 pagesINST240 Sec4bhanu6212No ratings yet
- 50 Studies Every Anesthesiologist Shoud Know 2019Document305 pages50 Studies Every Anesthesiologist Shoud Know 2019pcut100% (2)
- A New Approach To Air Quality in Hospitals: Www.p3italy - ItDocument19 pagesA New Approach To Air Quality in Hospitals: Www.p3italy - ItMuneer Ahmed ShaikNo ratings yet
- Fraction Selection BrochureDocument2 pagesFraction Selection Brochureapi-186663124No ratings yet
- CV KM Roy Supit 01 April 2019Document3 pagesCV KM Roy Supit 01 April 2019Ephanama TehnikNo ratings yet
- VISTA LAND AND LIFESCAPES INC FinalDocument9 pagesVISTA LAND AND LIFESCAPES INC Finalmarie crisNo ratings yet
- 2010 ATRA Technical SeminarDocument35 pages2010 ATRA Technical Seminartambache69100% (1)
- Customised Effective Resumes: Content & ChronologyDocument10 pagesCustomised Effective Resumes: Content & ChronologyRishi JhaNo ratings yet
- Sokkia MagnetDocument9 pagesSokkia Magnetbbutros_317684077No ratings yet
- Ten Questions Concerning Hybrid Computational Physical Mod - 2016 - Building andDocument10 pagesTen Questions Concerning Hybrid Computational Physical Mod - 2016 - Building andQU DAUPNo ratings yet
- Effects of Brainstorming On Students' Achievement in Senior Secondary ChemistryDocument8 pagesEffects of Brainstorming On Students' Achievement in Senior Secondary ChemistryzerufasNo ratings yet
- Avila-Flores Etal 2017 - The Use of The DPSIR Framework To Estimate Impacts of Urbanization On Mangroves of La Paz BCSDocument13 pagesAvila-Flores Etal 2017 - The Use of The DPSIR Framework To Estimate Impacts of Urbanization On Mangroves of La Paz BCSKriistian Rene QuintanaNo ratings yet
- The Impact On Digital Marketing During Pandemic Outbreak COVID-19 On Business DevelopmentDocument5 pagesThe Impact On Digital Marketing During Pandemic Outbreak COVID-19 On Business DevelopmentInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Microtronics Technologies: GSM Based Vehicle Theft Detection SystemDocument3 pagesMicrotronics Technologies: GSM Based Vehicle Theft Detection Systemابراهيم الثوبريNo ratings yet
- Cv1000 Tim WinDocument202 pagesCv1000 Tim WinAshraf SaeedNo ratings yet
- Breeding Corydoras MelanotaeniaDocument3 pagesBreeding Corydoras MelanotaeniayudispriyambodoNo ratings yet
- What Is Your Future Plan EssayDocument3 pagesWhat Is Your Future Plan Essayafhbexrci100% (2)
- Rexroth 4we10 Data Sheet PDFDocument10 pagesRexroth 4we10 Data Sheet PDFSIVARAMANJAGANATHANNo ratings yet
- TDBFP - Gear Pump API 676 PDFDocument42 pagesTDBFP - Gear Pump API 676 PDFRamon A. Ruiz O.No ratings yet
- SQL Server ManagementDocument185 pagesSQL Server ManagementnalinagcNo ratings yet
- FINAS A8 Riippumattomuuden Arv Finasin Toimperiaatteet enDocument2 pagesFINAS A8 Riippumattomuuden Arv Finasin Toimperiaatteet enMariam KhanNo ratings yet
- Gears DifferentialDocument13 pagesGears Differentialpulkitymcaust_112907100% (1)
- CRC Ace Far 1ST PBDocument9 pagesCRC Ace Far 1ST PBJohn Philip Castro100% (1)