You might also like
- Different Types of Electric MotorsDocument6 pagesDifferent Types of Electric MotorsJazzminNo ratings yet
- 1104 Troubleshooting PERKINS PDFDocument220 pages1104 Troubleshooting PERKINS PDFAhmed Gad100% (2)
- Peugeot 605 Wiring DiagramDocument372 pagesPeugeot 605 Wiring DiagramDiego Javier Muniagurria100% (1)
- Refrigerant Piping Design Guide Daikin AG 31-011 LRDocument78 pagesRefrigerant Piping Design Guide Daikin AG 31-011 LRRm Moh0% (1)
- Llustrated Arts Anual: RZT-L 42, 46, 50 & 54-Inch Cutting DecksDocument48 pagesLlustrated Arts Anual: RZT-L 42, 46, 50 & 54-Inch Cutting DecksNabucodonosor Rey BabilonioNo ratings yet
- Eaton VIS MotorDocument36 pagesEaton VIS MotorEysakaylovasNo ratings yet
- Boeing 737-800 Freighter Conversion Course Related AMM PagesDocument80 pagesBoeing 737-800 Freighter Conversion Course Related AMM Pagessomesh pandeyNo ratings yet
- 30XA WIRING 30xa-1w PDFDocument20 pages30XA WIRING 30xa-1w PDFKumar sssssNo ratings yet
- Electrical Machines Induction and Synchronous MachinesDocument42 pagesElectrical Machines Induction and Synchronous MachinesYoshua DylanNo ratings yet
- Perkins 4006 23TAG3A 800 KVADocument2 pagesPerkins 4006 23TAG3A 800 KVABudi S100% (1)
- TF500 22a - PV3 300 16Document6 pagesTF500 22a - PV3 300 16Jimmy HaddadNo ratings yet
- Chapter 3 Phase Induction MachinesDocument101 pagesChapter 3 Phase Induction Machineskelemyas ayalewNo ratings yet
- Ac and DC MotorDocument6 pagesAc and DC MotorKhairunnisa ZakiriNo ratings yet
- Chapter4 Synchronous MachinesDocument34 pagesChapter4 Synchronous Machinessatyakar_vvk100% (1)
- Group Number - 17: Prof. Saifullah PayamiDocument7 pagesGroup Number - 17: Prof. Saifullah PayamiMayank SinghNo ratings yet
- Motors and Loads: 3.1 Three Phase Asynchronous MotorsDocument1 pageMotors and Loads: 3.1 Three Phase Asynchronous MotorsHoon MiewJieNo ratings yet
- Lesson 3A - Synchronous Motor FundamentalsDocument14 pagesLesson 3A - Synchronous Motor FundamentalsJay LopezNo ratings yet
- Ee6703 Sem Small and Big NotesDocument107 pagesEe6703 Sem Small and Big NotesSANGEETHA JAYAMURUGANNo ratings yet
- Ee2403 (Special Electrical Machines Question BankDocument20 pagesEe2403 (Special Electrical Machines Question Bankkrish_skumar6302No ratings yet
- Term Paper: Subject: Ele 102Document20 pagesTerm Paper: Subject: Ele 102Rajesh VermaNo ratings yet
- Motors and Loads: 3.3 Synchronous Motors 3.4 Direct Current Motors Commonly Named DC MotorsDocument1 pageMotors and Loads: 3.3 Synchronous Motors 3.4 Direct Current Motors Commonly Named DC MotorsHoon MiewJieNo ratings yet
- AC Machines AC MachinesDocument43 pagesAC Machines AC MachinesGokul RajNo ratings yet
- Electric Motor Working PrincipleDocument17 pagesElectric Motor Working PrincipleJeovanie DiosesNo ratings yet
- Chapter 5 Machine 1Document44 pagesChapter 5 Machine 1martazemeduNo ratings yet
- AC and DC MotorDocument13 pagesAC and DC MotorrikechNo ratings yet
- Electric MotorsDocument10 pagesElectric Motorsmgongo88No ratings yet
- Asg-3-Motors-And-Loads 7Document1 pageAsg-3-Motors-And-Loads 7Hoon MiewJieNo ratings yet
- 19P205 Electrical MachinesDocument34 pages19P205 Electrical Machinessumanthlogn007No ratings yet
- Synchronous Motor & Its Applications & Power Factor ImprovementDocument4 pagesSynchronous Motor & Its Applications & Power Factor ImprovementYash BansalNo ratings yet
- DC MotorsDocument45 pagesDC Motorstristan jeff bautistaNo ratings yet
- SPECIAL ELECTRICAL MACHINES - Questions & AnswersDocument38 pagesSPECIAL ELECTRICAL MACHINES - Questions & AnswersMuhammad JunaidNo ratings yet
- Three-Phase Synchronous Machines Construction & Armature WindingsDocument10 pagesThree-Phase Synchronous Machines Construction & Armature WindingssuryafnspideyNo ratings yet
- Synchronous MotorDocument6 pagesSynchronous MotorSelvasundar KumarNo ratings yet
- Types of Ac GeneratorDocument10 pagesTypes of Ac GeneratorJherel BerinNo ratings yet
- A Synchronous Motor From A Hammond OrganDocument8 pagesA Synchronous Motor From A Hammond Organsiva prakashNo ratings yet
- 3 Phase Induction MotorDocument12 pages3 Phase Induction MotorNikesh MoreNo ratings yet
- DC MototorDocument19 pagesDC MototorAbhinav JainNo ratings yet
- Bahir Dar Institute OF Technology: Synchronous MachinesDocument18 pagesBahir Dar Institute OF Technology: Synchronous Machineskelemyas ayalewNo ratings yet
- Eletrical Machines-Iii Lecture Notes Unit-IDocument19 pagesEletrical Machines-Iii Lecture Notes Unit-IDIVYA PRASOONA CNo ratings yet
- Chapter 4 (Week 15) - Machines (AC Machines) - HMDocument23 pagesChapter 4 (Week 15) - Machines (AC Machines) - HMRoshan Jawad ZafirNo ratings yet
- Chapter-3 Induction Machines: I E M & P SDocument112 pagesChapter-3 Induction Machines: I E M & P SLim Kai XuanNo ratings yet
- Unit 1-Synchronous Reluctance MotorDocument2 pagesUnit 1-Synchronous Reluctance MotorAbenav SankarNo ratings yet
- Electric Motor: Types of MotorsDocument8 pagesElectric Motor: Types of MotorsPlutoNo ratings yet
- Powerpoint Presentation: Prasanta SarkarDocument22 pagesPowerpoint Presentation: Prasanta SarkarMazhar HaqNo ratings yet
- Synchronous Motor: AC Motor Rotor Alternating Current Rotating Magnetic FieldDocument5 pagesSynchronous Motor: AC Motor Rotor Alternating Current Rotating Magnetic FieldDeepak SekarNo ratings yet
- DC Motors and Stepper Motors PDFDocument8 pagesDC Motors and Stepper Motors PDFFrank AlvarezNo ratings yet
- DC Motor - Wikipedia, The Free EncyclopediaDocument2 pagesDC Motor - Wikipedia, The Free Encyclopediadonodoni0008No ratings yet
- Act 2 - 1 Gen Síncrono MaqEle - II 2023Document34 pagesAct 2 - 1 Gen Síncrono MaqEle - II 2023Héctor Manuel Bobadilla PimientaNo ratings yet
- 3&4 Synchronous MachinesDocument44 pages3&4 Synchronous MachinesMirkena kebedeNo ratings yet
- Synchronous Motor - Wikipedia, The Free EncyclopediaDocument10 pagesSynchronous Motor - Wikipedia, The Free EncyclopediaJoshua PohanNo ratings yet
- Week 3 B 2 Electric MotorsDocument59 pagesWeek 3 B 2 Electric MotorsCharlton S.InaoNo ratings yet
- Factors On Motor Selection & EffiencyDocument10 pagesFactors On Motor Selection & EffiencyRaushan Jha100% (1)
- Assignment 2 Ac DCDocument15 pagesAssignment 2 Ac DCVincoy JohnlloydNo ratings yet
- Single Phase Induction MotorDocument5 pagesSingle Phase Induction MotorDanny JaliusNo ratings yet
- Cadm 4Document27 pagesCadm 4kritiney sharmaNo ratings yet
- AC Commutator Motors Repulsion Series Motor UniversalDocument3 pagesAC Commutator Motors Repulsion Series Motor UniversalwhrferNo ratings yet
- Electrical Engineering - Engineering - DC Machines and Synchronous Machines - Synchronous Machines - NotesDocument73 pagesElectrical Engineering - Engineering - DC Machines and Synchronous Machines - Synchronous Machines - NotesT. VARMANo ratings yet
- Introduction To Synchronous MachinesDocument7 pagesIntroduction To Synchronous Machineshus khNo ratings yet
- Sec12 - Electric MotorsDocument12 pagesSec12 - Electric MotorsYusufNo ratings yet
- Synchronous MotorDocument6 pagesSynchronous MotorPraveen Ramesh KarnamNo ratings yet
- Unit-2: (This Unit Covers Criteria P3, P6, M3) Synchronous MotorDocument14 pagesUnit-2: (This Unit Covers Criteria P3, P6, M3) Synchronous MotorMuhja AljaserNo ratings yet
- DC MotorDocument3 pagesDC MotorAhmad AzizudinNo ratings yet
- AC Motors: Almocera, Richlyn Iza R. Mitra, Jervelyn Kae FDocument41 pagesAC Motors: Almocera, Richlyn Iza R. Mitra, Jervelyn Kae FIcon Byl P. VergaraNo ratings yet
- Unit 5 - 8 PDFDocument73 pagesUnit 5 - 8 PDFEmar OreaNo ratings yet
- Motors 3ph Jenneson Ch11Document35 pagesMotors 3ph Jenneson Ch11atashi baran mohantyNo ratings yet
- Motors and Transmission: Speed. It Is Rather A Function of Flux and Armature CurrentDocument4 pagesMotors and Transmission: Speed. It Is Rather A Function of Flux and Armature CurrentSulabh KumraNo ratings yet
- Taylor Pipe SupportsDocument3 pagesTaylor Pipe SupportsHoon MiewJieNo ratings yet
- 500 600 Ignition Temperature of Gas Surface Temperature of ApparatusDocument1 page500 600 Ignition Temperature of Gas Surface Temperature of ApparatusHoon MiewJieNo ratings yet
- Classification of Flammable Gases and Dusts in Groups: Europe/IEC North America Min. Ignition Energy ExamplesDocument1 pageClassification of Flammable Gases and Dusts in Groups: Europe/IEC North America Min. Ignition Energy ExamplesHoon MiewJieNo ratings yet
- Taylor Pipe SupportsDocument6 pagesTaylor Pipe SupportsHoon MiewJieNo ratings yet
- Extracted Pages From 2022 - ESAH - 3.1Document1 pageExtracted Pages From 2022 - ESAH - 3.1Hoon MiewJieNo ratings yet
- Ignition Temperature - Surface Temperature: Fuels ApparatusDocument1 pageIgnition Temperature - Surface Temperature: Fuels ApparatusHoon MiewJieNo ratings yet
- Classification of Flammable Gases, Vapors, Mists: Hot Surface SparksDocument1 pageClassification of Flammable Gases, Vapors, Mists: Hot Surface SparksHoon MiewJieNo ratings yet
- Equipment Classification According To ATEXDocument1 pageEquipment Classification According To ATEXHoon MiewJieNo ratings yet
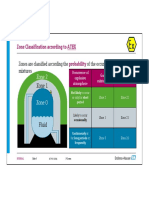
- Zone Classification According To ATEX ProbabilityDocument1 pageZone Classification According To ATEX ProbabilityHoon MiewJieNo ratings yet
- Equipment Group - ATEXDocument1 pageEquipment Group - ATEXHoon MiewJieNo ratings yet
- Equipment Classification According To IECDocument1 pageEquipment Classification According To IECHoon MiewJieNo ratings yet
- Ex-Linear Light Fitting With Metal Housing For Surface MountingDocument6 pagesEx-Linear Light Fitting With Metal Housing For Surface MountingHoon MiewJieNo ratings yet
- Equipment Designation To Zones: EPL Equipment Protection LevelDocument1 pageEquipment Designation To Zones: EPL Equipment Protection LevelHoon MiewJieNo ratings yet
- 1vap428831-Db SCBDocument4 pages1vap428831-Db SCBHoon MiewJieNo ratings yet
- Motors and Loads: 3.3 Synchronous Motors 3.4 Direct Current Motors Commonly Named DC MotorsDocument1 pageMotors and Loads: 3.3 Synchronous Motors 3.4 Direct Current Motors Commonly Named DC MotorsHoon MiewJieNo ratings yet
- Asg 3 Motors and Loads 9Document1 pageAsg 3 Motors and Loads 9Hoon MiewJieNo ratings yet
- Asg-3-Motors-And-Loads 9Document1 pageAsg-3-Motors-And-Loads 9Hoon MiewJieNo ratings yet
- Asg 3 Motors and Loads 8Document1 pageAsg 3 Motors and Loads 8Hoon MiewJieNo ratings yet
- Asg-3-Motors-And-Loads 7Document1 pageAsg-3-Motors-And-Loads 7Hoon MiewJieNo ratings yet
- Motors and Loads: 3.1 Three Phase Asynchronous MotorsDocument1 pageMotors and Loads: 3.1 Three Phase Asynchronous MotorsHoon MiewJieNo ratings yet
- Asg-3-Motors-And-Loads 1Document1 pageAsg-3-Motors-And-Loads 1Hoon MiewJieNo ratings yet
- Asg 3 Motors and Loads 2Document1 pageAsg 3 Motors and Loads 2Hoon MiewJieNo ratings yet
- Asg 3 Motors and Loads 2Document1 pageAsg 3 Motors and Loads 2Hoon MiewJieNo ratings yet
- Asg 3 Motors and Loads 9Document1 pageAsg 3 Motors and Loads 9Hoon MiewJieNo ratings yet
- Asg 3 Motors and Loads 8Document1 pageAsg 3 Motors and Loads 8Hoon MiewJieNo ratings yet
- Asg-3-Motors-And-Loads 1Document1 pageAsg-3-Motors-And-Loads 1Hoon MiewJieNo ratings yet
- Copy Part1Document1 pageCopy Part1Hoon MiewJieNo ratings yet
- TM1551 John Deere 7200 and 7400 2WD or MFWD Tractors Repair Technical ManualDocument9 pagesTM1551 John Deere 7200 and 7400 2WD or MFWD Tractors Repair Technical ManualtteelsarsNo ratings yet
- Sample of Electrical DesignDocument9 pagesSample of Electrical DesignAshik Rahman RifatNo ratings yet
- Compresion Del 3vzDocument2 pagesCompresion Del 3vzAlfredoMurilloPereiraNo ratings yet
- EES 612 Course OutlineDocument5 pagesEES 612 Course OutlineJoseph DNo ratings yet
- UNI 02 DesignofLeversDocument40 pagesUNI 02 DesignofLeversRoman HeelNo ratings yet
- Mid Diesel Engine Range: All The Power You NeedDocument12 pagesMid Diesel Engine Range: All The Power You Needegbert axelNo ratings yet
- DAutonomous Toggle Scissor JackDocument19 pagesDAutonomous Toggle Scissor JackAsad Ali100% (1)
- 1.epicyclic Gear TrainDocument3 pages1.epicyclic Gear TrainRishi ShuklaNo ratings yet
- Study and Operation of An Engine Lathe.: Course No: Ipe-108 Course Title: Workshop PracticeDocument9 pagesStudy and Operation of An Engine Lathe.: Course No: Ipe-108 Course Title: Workshop PracticeSazzadNo ratings yet
- Atb461 Isuzu 4l30-E Delays ForwardDocument1 pageAtb461 Isuzu 4l30-E Delays ForwardAleNo ratings yet
- 06 SafDocument67 pages06 SafOleksandr U.No ratings yet
- Heavy Two WheelerDocument22 pagesHeavy Two WheelersenthilnaveenNo ratings yet
- GF 400 2017Document351 pagesGF 400 2017ArlanNo ratings yet
- Sanyo Wall Mounted Multi Split System Indoor Units Sell SheetDocument2 pagesSanyo Wall Mounted Multi Split System Indoor Units Sell Sheete-ComfortUSANo ratings yet
- Understanding Motor Controls 3rd Edition Herman Test BankDocument4 pagesUnderstanding Motor Controls 3rd Edition Herman Test BankDebits100% (5)
- 5M iT4TractorDocument2 pages5M iT4TractorBogdan PopescuNo ratings yet
- Fuel InjectorsDocument2 pagesFuel InjectorsxLibelleNo ratings yet
- SP 168 DDocument8 pagesSP 168 DHarlinton descalziNo ratings yet
- Safety Precautions . . .. ..2 About U600 . .. . ..4Document32 pagesSafety Precautions . . .. ..2 About U600 . .. . ..4NablabsNo ratings yet
- Price List PDFDocument36 pagesPrice List PDFanon_758223626100% (1)
- HBK Webinar - Electric Motors 201 For NVH EngineersDocument41 pagesHBK Webinar - Electric Motors 201 For NVH EngineersMARIO ALBERTO MANILLA CORDOBANo ratings yet