You might also like
- Cummins Power Hour - ParallelingTopologies - Uptime InstituteDocument42 pagesCummins Power Hour - ParallelingTopologies - Uptime InstituteasuhuaneNo ratings yet
- Supersonic ReviewerDocument36 pagesSupersonic ReviewerBerns Dulam100% (1)
- Curso MBE4000 PDFDocument33 pagesCurso MBE4000 PDFElmer Tintaya Mamani100% (1)
- A Parametric Study of Spur Gear Dynamics PDFDocument88 pagesA Parametric Study of Spur Gear Dynamics PDFCan CemreNo ratings yet
- CUBX Parts Manual y PlanosDocument224 pagesCUBX Parts Manual y Planosalex2gustavo2cuevas2100% (1)
- Universal Soft Pneumatic Robotic Gripper With Variable Effective LengthDocument6 pagesUniversal Soft Pneumatic Robotic Gripper With Variable Effective Lengthflv_91No ratings yet
- Flight Controls Flaps and Trim ManualDocument45 pagesFlight Controls Flaps and Trim ManualRa Gon Gar Ragongar100% (2)
- Design and Comparison of Mufflers Having Different Arrangements For Diesel EngineDocument8 pagesDesign and Comparison of Mufflers Having Different Arrangements For Diesel EngineWaruna PasanNo ratings yet
- Chapter 02Document3 pagesChapter 02Robert Kerwick100% (2)
- Design of Mechanical GripperDocument64 pagesDesign of Mechanical GripperOtavio12350% (4)
- Pipe Flow Friction Factor CalculationsDocument11 pagesPipe Flow Friction Factor CalculationsVictor ValenciaNo ratings yet
- Chem3002-3-Stage and Continuous Gas Liquid Separation ProcessesDocument116 pagesChem3002-3-Stage and Continuous Gas Liquid Separation Processesthvindren anandarajahNo ratings yet
- Ponsse H73Document43 pagesPonsse H73Juan Cea Ferreira100% (1)
- L1 11.2.2 Airframe Structures - Construction Concepts A-1Document7 pagesL1 11.2.2 Airframe Structures - Construction Concepts A-1mohan reddyNo ratings yet
- Soft RoboticsDocument11 pagesSoft RoboticsNando93No ratings yet
- Boq Pekerjaan MepDocument57 pagesBoq Pekerjaan MepAnan Nurdin100% (1)
- Universal Robotic Gripper: (Based On Jamming of Granular Materials)Document23 pagesUniversal Robotic Gripper: (Based On Jamming of Granular Materials)Ankita Dashora0% (1)
- From (Soft Robotic Grippers) : DefintionDocument5 pagesFrom (Soft Robotic Grippers) : Defintionيوسف الأحمديNo ratings yet
- Universal Robotic Gripper Based On The Jamming of Granular MaterialDocument6 pagesUniversal Robotic Gripper Based On The Jamming of Granular MaterialMengyu ChenNo ratings yet
- Multifinger Robotic HandDocument9 pagesMultifinger Robotic Handujjwal_arora5No ratings yet
- 2018-Jun Shintake-Soft Robotic GrippersDocument33 pages2018-Jun Shintake-Soft Robotic Grippersitm.ggwpNo ratings yet
- Model-Based Online Learning and Adaptive Control For A Human-Wearable Soft Robot'' Integrated SystemDocument21 pagesModel-Based Online Learning and Adaptive Control For A Human-Wearable Soft Robot'' Integrated SystemAlemeNo ratings yet
- Sensors: Comparison of Different Technologies For Soft Robotics GrippersDocument18 pagesSensors: Comparison of Different Technologies For Soft Robotics GrippersIsh ShilpNo ratings yet
- Sahala 1Document13 pagesSahala 1Sahala HydroseNo ratings yet
- Design of A Soft Robotic Gripper For Improved Grasping With Suction CupsDocument6 pagesDesign of A Soft Robotic Gripper For Improved Grasping With Suction CupsAl 4343No ratings yet
- Applsci 12 06306 v2Document17 pagesApplsci 12 06306 v2XhoniNo ratings yet
- Research Proposal Plan - FinalDocument8 pagesResearch Proposal Plan - FinalAnupama GovindNo ratings yet
- Shantilal Shah Engineering College BhavnagarDocument18 pagesShantilal Shah Engineering College BhavnagarAshwin BuddharajuNo ratings yet
- Actuation Technologies For Soft Robot Grippers and Manipulators: A ReviewDocument15 pagesActuation Technologies For Soft Robot Grippers and Manipulators: A ReviewXhoniNo ratings yet
- 2020 A Hybrid, Soft Exoskeleton Glove Equipped With A TelescopicDocument7 pages2020 A Hybrid, Soft Exoskeleton Glove Equipped With A TelescopicANSHUMAAN P BHAGATNo ratings yet
- Design and Optimization of A Dextrous Robotic FingDocument9 pagesDesign and Optimization of A Dextrous Robotic Fingamir pagoliNo ratings yet
- Gripper StudyDocument15 pagesGripper StudyCamille CarvalhoNo ratings yet
- A Compliant Adaptive Gripper and Its Intrinsic Force Sensing MethodDocument20 pagesA Compliant Adaptive Gripper and Its Intrinsic Force Sensing MethodmikelaxnNo ratings yet
- Robot End EffectorDocument7 pagesRobot End EffectorAnonymous Hy5Ir9QXNo ratings yet
- Hussain 2019 DesignDocument6 pagesHussain 2019 DesignWilberFabiánNo ratings yet
- Gripper Design GuidelinesDocument11 pagesGripper Design Guidelinesengr_faheemNo ratings yet
- A Rigid-Flexible Coupling Three-Finger Soft Gripper For Fruit PickingDocument5 pagesA Rigid-Flexible Coupling Three-Finger Soft Gripper For Fruit PickingLeonardoGrandiniAdamiNo ratings yet
- A Topology-Optimized 3D Printed Compliant Finger With Flex Sensor For Adaptive Grasping of Unknown ObjectsDocument6 pagesA Topology-Optimized 3D Printed Compliant Finger With Flex Sensor For Adaptive Grasping of Unknown ObjectsRenato NoalNo ratings yet
- 2013 - Polygerinos - Towards A Soft Pneumatic Glove For Hand RehabilitationDocument7 pages2013 - Polygerinos - Towards A Soft Pneumatic Glove For Hand RehabilitationEbrahim AwadNo ratings yet
- Grasping With Kirigami Shells: Science Robotics May 2021Document11 pagesGrasping With Kirigami Shells: Science Robotics May 2021Randhir SwarnkarNo ratings yet
- Evolving Jamming GrippersDocument9 pagesEvolving Jamming Grippersblrrrgh333No ratings yet
- ME424 201516 Unit2Document29 pagesME424 201516 Unit2harsha100% (1)
- End EffectorsDocument34 pagesEnd EffectorsJunix Jhenvo A Cuevas100% (1)
- Proceedings2023toh - Shortpaperstoh 3274584 PPDocument6 pagesProceedings2023toh - Shortpaperstoh 3274584 PPcharlesleclerc9999No ratings yet
- Actuators 10 00299 v2Document33 pagesActuators 10 00299 v2Hong Phuoc DoanNo ratings yet
- A 3D Printed Soft Prosthetic Hand With Embedded Actuation and Soft Sensing Capabilities For Directly and Seamlessly Switching Between Various Hand GesturesDocument6 pagesA 3D Printed Soft Prosthetic Hand With Embedded Actuation and Soft Sensing Capabilities For Directly and Seamlessly Switching Between Various Hand GesturesLikhithsgowdaNo ratings yet
- 基于滚轮的物体抓取与定位灵巧手的设计Document7 pages基于滚轮的物体抓取与定位灵巧手的设计文龙No ratings yet
- GelSight High-Resolution Robot Tactile Sensors For Estimating Geometry and ForceDocument21 pagesGelSight High-Resolution Robot Tactile Sensors For Estimating Geometry and ForcewsfNo ratings yet
- Charbel 2022 - A 3D Printed Modular Soft Gripper Integrated With Metamaterials For Conformal GraspingDocument13 pagesCharbel 2022 - A 3D Printed Modular Soft Gripper Integrated With Metamaterials For Conformal GraspingemailpergiochionlineNo ratings yet
- Gripper Mechanism: Department of Mechanical EngineeringDocument16 pagesGripper Mechanism: Department of Mechanical EngineeringSoumik DasNo ratings yet
- Review: The Re-Configurable Robotic Gripper Design, Dynamics, and ControlDocument20 pagesReview: The Re-Configurable Robotic Gripper Design, Dynamics, and ControlTJPRC PublicationsNo ratings yet
- Abstract WritingDocument11 pagesAbstract WritingHưng LêNo ratings yet
- Paper 04 A - Brief - Review - On - Robotic - Grippers - ClassificationsDocument4 pagesPaper 04 A - Brief - Review - On - Robotic - Grippers - ClassificationsJiggaNo ratings yet
- 11.5.5 Articulating Fingers: 11.6 Grasping Modes, Forces, and StabilityDocument3 pages11.5.5 Articulating Fingers: 11.6 Grasping Modes, Forces, and StabilityMako TyrellNo ratings yet
- Sensors: Estimating Human Wrist Stiffness During A Tooling TaskDocument14 pagesSensors: Estimating Human Wrist Stiffness During A Tooling TaskAdi CrişanNo ratings yet
- Gripper: Types of GripsDocument6 pagesGripper: Types of GripsRajandra VermaNo ratings yet
- Design and Development of Compactly Folding Parallel Open-Close Gripper With Wide StrokeDocument7 pagesDesign and Development of Compactly Folding Parallel Open-Close Gripper With Wide Strokenil deNo ratings yet
- Swarming, Swirling and Stasis in Sequestered Bristle-Bots: Keywords: Swarming, Collective Behavior, RobotsDocument21 pagesSwarming, Swirling and Stasis in Sequestered Bristle-Bots: Keywords: Swarming, Collective Behavior, Robotsjsmithy456No ratings yet
- A Review of Jamming Actuation in Soft RoboticsDocument31 pagesA Review of Jamming Actuation in Soft Roboticsjennifer yipNo ratings yet
- Applsci 13 07042Document16 pagesApplsci 13 07042wtw24399No ratings yet
- Guidelines For The Design of Robotic Gripping System - Doc PDFDocument24 pagesGuidelines For The Design of Robotic Gripping System - Doc PDFriade88No ratings yet
- Unit1-Work Envelope, Workspaceand FullDocument13 pagesUnit1-Work Envelope, Workspaceand FullBarvinNo ratings yet
- Electronics 11 04180Document12 pagesElectronics 11 04180Moises PinedaNo ratings yet
- Charbel 2019 - Fully - 3D - Printed - Monolithic - Soft - Gripper - With - High - Conformal - Grasping - CapabilityDocument6 pagesCharbel 2019 - Fully - 3D - Printed - Monolithic - Soft - Gripper - With - High - Conformal - Grasping - CapabilityemailpergiochionlineNo ratings yet
- 61 Ijmperddec201861Document10 pages61 Ijmperddec201861TJPRC PublicationsNo ratings yet
- Exoglove Research PaperDocument8 pagesExoglove Research Papersanket jainNo ratings yet
- A Survey On Magnetic Wall-Climbing Robots For Inspection: Jaise Jose, D. Dinakaran, M. M. Ramya & D. G. Harris SamuelDocument10 pagesA Survey On Magnetic Wall-Climbing Robots For Inspection: Jaise Jose, D. Dinakaran, M. M. Ramya & D. G. Harris SamuelTJPRC PublicationsNo ratings yet
- Robotics 12 00005 v2Document33 pagesRobotics 12 00005 v2Duc AnhNo ratings yet
- A Practical 3d-Printed Soft Robotic Prosthetic Hand With Multi-Articulating CapabilitiesDocument23 pagesA Practical 3d-Printed Soft Robotic Prosthetic Hand With Multi-Articulating Capabilitiesmaryamsaleem430No ratings yet
- Sampling-Based Finger Gaits Planning For Multifingered Robotic HandDocument18 pagesSampling-Based Finger Gaits Planning For Multifingered Robotic HandAlioune Badara DioufNo ratings yet
- JYTHISEMINARDocument13 pagesJYTHISEMINARHima BindhuNo ratings yet
- Ubh 3 A Biologically Inspired Robotic HaDocument7 pagesUbh 3 A Biologically Inspired Robotic HaKhan AyanNo ratings yet
- From (Soft Robotic Grippers) : DefintionDocument5 pagesFrom (Soft Robotic Grippers) : Defintionيوسف الأحمديNo ratings yet
- 2عاطف collectionDocument2 pages2عاطف collectionيوسف الأحمديNo ratings yet
- Differential Equations Electrical Mechanical Systems.: 1 Chapter 2BDocument47 pagesDifferential Equations Electrical Mechanical Systems.: 1 Chapter 2Bيوسف الأحمديNo ratings yet
- Chapter 3A SlidesDocument26 pagesChapter 3A Slidesيوسف الأحمديNo ratings yet
- System Modeling: 1 Chapter 2ADocument16 pagesSystem Modeling: 1 Chapter 2Aيوسف الأحمديNo ratings yet
- Chapter 1 Slides S 2021Document59 pagesChapter 1 Slides S 2021يوسف الأحمديNo ratings yet
- Chapter 3C-MATLAB SlidesDocument17 pagesChapter 3C-MATLAB Slidesيوسف الأحمديNo ratings yet
- System Modeling: 1 Chapter 2ADocument16 pagesSystem Modeling: 1 Chapter 2Aيوسف الأحمديNo ratings yet
- Chapter 3B SlidesDocument23 pagesChapter 3B Slidesيوسف الأحمديNo ratings yet
- Mxu 500-00-02Document58 pagesMxu 500-00-02alexander ortizNo ratings yet
- Tolerances For Pressure VesselsDocument2 pagesTolerances For Pressure VesselsolekNo ratings yet
- Water Pump Manual 1Document12 pagesWater Pump Manual 1Baharudin BujangNo ratings yet
- Manual Bomba de Aceite 1701053Document9 pagesManual Bomba de Aceite 1701053ventas freyreNo ratings yet
- Fractional Kilowatt MotorsDocument37 pagesFractional Kilowatt MotorsPavan Kumar100% (1)
- 74 IgnitionDocument19 pages74 Ignitionmohammad qaruishNo ratings yet
- RepairDocument3 pagesRepairTriumph Air Repair-Engineer staff100% (2)
- Thermal Physics IIIDocument4 pagesThermal Physics IIITilak K CNo ratings yet
- Electrical Tools Details (Jindal Centre & Hostel)Document10 pagesElectrical Tools Details (Jindal Centre & Hostel)RITENDRA GHOSHNo ratings yet
- Burger 1949Document3 pagesBurger 1949Miroljub MaksimovicNo ratings yet
- Group 4 - Ideal Gas Vs Real Gas Experiment PDFDocument5 pagesGroup 4 - Ideal Gas Vs Real Gas Experiment PDFHumaira NabilaNo ratings yet
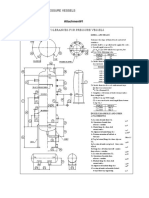
- Attachment A: Omv (Pakistan) GMBH Miano-17 (Nfo-01) Wellhead Development ProjectDocument2 pagesAttachment A: Omv (Pakistan) GMBH Miano-17 (Nfo-01) Wellhead Development Projectnas_mech8208No ratings yet
- PCP Study Case Fullarticle GMC15-150Document18 pagesPCP Study Case Fullarticle GMC15-150Gunjesh kumarNo ratings yet
- Kil Exb Series Junction BoxesDocument4 pagesKil Exb Series Junction Boxesalexis oliveraNo ratings yet
- Me6502 HMT Mech Vs Au Unit VDocument12 pagesMe6502 HMT Mech Vs Au Unit VnahlashkeifeNo ratings yet
- Close-Coupled Pumps: - Fixed Speed - Variable Speed - Pneumatic Models - Continuous Tubing - Loadsure ElementsDocument8 pagesClose-Coupled Pumps: - Fixed Speed - Variable Speed - Pneumatic Models - Continuous Tubing - Loadsure ElementsVruno Velasquez LNo ratings yet
- Apache RTR 180Document60 pagesApache RTR 180Luis FelipeNo ratings yet