You might also like
- PhasechangesseDocument5 pagesPhasechangesseapi-30969951177% (57)
- Overhead and Gantry CranesDocument3 pagesOverhead and Gantry CranesCesar NietoNo ratings yet
- Asme Section Ii A Sa-426 PDFDocument6 pagesAsme Section Ii A Sa-426 PDFAnonymous GhPzn1xNo ratings yet
- L'AMBIANCE PLAZA COLLAPSE CAUSES REMAIN UNCLEARDocument27 pagesL'AMBIANCE PLAZA COLLAPSE CAUSES REMAIN UNCLEARMirza Sajjad HussainNo ratings yet
- OIE 751 ROBOTICS Unit 2 Class 3 (03-9-2020)Document12 pagesOIE 751 ROBOTICS Unit 2 Class 3 (03-9-2020)MICHEL RAJNo ratings yet
- End EffectersDocument4 pagesEnd EffectersSindhu BhaskarNo ratings yet
- Types of End Effectors Rajesh MallelaDocument36 pagesTypes of End Effectors Rajesh MallelaHussain YousifNo ratings yet
- Rohini 90748460674Document9 pagesRohini 90748460674Suthin .vNo ratings yet
- Understanding End EffectorsDocument18 pagesUnderstanding End EffectorsAshwin BuddharajuNo ratings yet
- End Effectors: Presented by S.K.Nitharshana JuvalaDocument22 pagesEnd Effectors: Presented by S.K.Nitharshana JuvalaNitharshana JuvalaNo ratings yet
- Gripper Mechanism: Department of Mechanical EngineeringDocument16 pagesGripper Mechanism: Department of Mechanical EngineeringSoumik DasNo ratings yet
- Automated Forest Maintenance ManeuverDocument7 pagesAutomated Forest Maintenance Maneuveravik0381No ratings yet
- Mech End EffectorsDocument5 pagesMech End EffectorsBhavya RawalNo ratings yet
- Unit1-Work Envelope, Workspaceand FullDocument13 pagesUnit1-Work Envelope, Workspaceand FullBarvinNo ratings yet
- End EffectorDocument28 pagesEnd EffectorROHIT SRIVASTAVNo ratings yet
- Robo 2Document10 pagesRobo 2mitulshah18No ratings yet
- 8 Robotic GrippersDocument25 pages8 Robotic GrippersAdam MahmoodNo ratings yet
- Electronics 11 04180Document12 pagesElectronics 11 04180Moises PinedaNo ratings yet
- Robot End Effectors: DR V S KrushnasamyDocument48 pagesRobot End Effectors: DR V S KrushnasamyKrushnasamy SuramaniyanNo ratings yet
- Gripper StudyDocument15 pagesGripper StudyCamille CarvalhoNo ratings yet
- Final Project PrintDocument31 pagesFinal Project PrintDIPAK ALHATENo ratings yet
- Applsci 13 07042Document16 pagesApplsci 13 07042wtw24399No ratings yet
- Nitin AssignmentDocument6 pagesNitin AssignmentNitin TantuwayNo ratings yet
- Unit 2Document7 pagesUnit 2MANTHAN GHOSHNo ratings yet
- ME424 201516 Unit2Document29 pagesME424 201516 Unit2harsha100% (1)
- Me3403-Robotics and Machine Vision SystemDocument19 pagesMe3403-Robotics and Machine Vision SystemSengottaiyan MalaisamyNo ratings yet
- Dhairya RoboticDocument8 pagesDhairya Roboticmitulshah18No ratings yet
- Sensors: Comparison of Different Technologies For Soft Robotics GrippersDocument18 pagesSensors: Comparison of Different Technologies For Soft Robotics GrippersIsh ShilpNo ratings yet
- Design of Mechanical GripperDocument64 pagesDesign of Mechanical GripperOtavio12367% (3)
- Chapter One: Pneumatic Assempling Robotic ArmDocument13 pagesChapter One: Pneumatic Assempling Robotic ArmMahmoud AbdulAzizNo ratings yet
- Robotic End Effector NotesDocument24 pagesRobotic End Effector NotesTibebu MerideNo ratings yet
- Robotics and Vision System - TMTE 503 (Unit 1)Document14 pagesRobotics and Vision System - TMTE 503 (Unit 1)Raunak GuptaNo ratings yet
- Robotics 2023Document3 pagesRobotics 2023samu.barman04No ratings yet
- Paper 04 A - Brief - Review - On - Robotic - Grippers - ClassificationsDocument4 pagesPaper 04 A - Brief - Review - On - Robotic - Grippers - ClassificationsJiggaNo ratings yet
- EC8074 Unit 3Document5 pagesEC8074 Unit 3lvrevathiNo ratings yet
- Design of a gripping system for automated assembly of large building modulesDocument8 pagesDesign of a gripping system for automated assembly of large building modulesVeronicaNistorNo ratings yet
- Report 1Document25 pagesReport 1electrical engineeringNo ratings yet
- A Review On Grasping Principle and Robotic GrippersDocument6 pagesA Review On Grasping Principle and Robotic GrippersNima panahiNo ratings yet
- ECE315-T15 - AT1 - (Cat2&Cat3) Name: Catamora, ER Denice D. Year and Course: ECE03Document2 pagesECE315-T15 - AT1 - (Cat2&Cat3) Name: Catamora, ER Denice D. Year and Course: ECE03er denice catamoraNo ratings yet
- Gripper: Types of GripsDocument6 pagesGripper: Types of GripsRajandra VermaNo ratings yet
- Design and Analysis of Magnetorheological GripperDocument6 pagesDesign and Analysis of Magnetorheological Gripperengr_faheemNo ratings yet
- Fabrication & Controling of A Manipulator With Specific Coloured Object DetectionDocument18 pagesFabrication & Controling of A Manipulator With Specific Coloured Object DetectionTusher Saha50% (8)
- Application of Robots in Radioactive Environment: A Review: March 2014Document6 pagesApplication of Robots in Radioactive Environment: A Review: March 2014shintoNo ratings yet
- A Review of Jamming Actuation in Soft RoboticsDocument31 pagesA Review of Jamming Actuation in Soft Roboticsjennifer yipNo ratings yet
- SeminarDocument18 pagesSeminarAnonymous Ia9LPzNo ratings yet
- Basic Parts or Elements of A RobotDocument3 pagesBasic Parts or Elements of A RobotRenjith RajendraprasadNo ratings yet
- Universal Robotic Gripper: (Based On Jamming of Granular Materials)Document23 pagesUniversal Robotic Gripper: (Based On Jamming of Granular Materials)Ankita Dashora0% (1)
- SR211122201836Document6 pagesSR211122201836Shailesh RanawareNo ratings yet
- Actuators: Robotics Is The Branch ofDocument6 pagesActuators: Robotics Is The Branch ofNicoleSantosNo ratings yet
- Space Robotics Full ReportDocument29 pagesSpace Robotics Full ReportMahesh AkNo ratings yet
- Josh ReportDocument29 pagesJosh ReportJ.CNo ratings yet
- Robotics 12 00005 v2Document33 pagesRobotics 12 00005 v2Duc AnhNo ratings yet
- Robot End Effectors GuideDocument34 pagesRobot End Effectors GuideJunix Jhenvo A Cuevas100% (1)
- Robots at Space ExplorationDocument19 pagesRobots at Space ExplorationmohammedNo ratings yet
- Project SynopsisDocument8 pagesProject Synopsistaran jot100% (1)
- Space Robot: Miss. Shweta Kale, Miss. Gayatri Patole, Miss. Mohoni MohurleDocument8 pagesSpace Robot: Miss. Shweta Kale, Miss. Gayatri Patole, Miss. Mohoni MohurleInternational Journal of Engineering Inventions (IJEI)No ratings yet
- Direct & Inverse KinematicsDocument50 pagesDirect & Inverse KinematicsBilal BilalNo ratings yet
- Ch1 Introduction, Joints, ConfigurationsDocument12 pagesCh1 Introduction, Joints, ConfigurationsMelkamu SimenehNo ratings yet
- Vibration Control of Flexible Structures Using Semi-Active Mount: Experimental InvestigationDocument16 pagesVibration Control of Flexible Structures Using Semi-Active Mount: Experimental InvestigationElvis CarneiroNo ratings yet
- Soft Copy On RoboticsDocument18 pagesSoft Copy On RoboticsRaghavendra RaghavNo ratings yet
- New Microsoft Word DocumentDocument6 pagesNew Microsoft Word DocumentNikhil AshokNo ratings yet
- Robotic End Effector Using 4-ReportDocument39 pagesRobotic End Effector Using 4-Reportkarthikds91100% (3)
- Robotic Soldering ArmDocument53 pagesRobotic Soldering Armnihalmullaa100% (4)
- 1 s2.0 S0144860903000293 MainDocument20 pages1 s2.0 S0144860903000293 MainAnonymous Hy5Ir9QXNo ratings yet
- Application of Validated Mathematical Model of ComDocument8 pagesApplication of Validated Mathematical Model of ComAnonymous Hy5Ir9QXNo ratings yet
- Organic Horticulture HandbookDocument108 pagesOrganic Horticulture HandbookRO-AM-BDNo ratings yet
- Bioconversion of Organic Residues For Rural CommunitiesDocument1 pageBioconversion of Organic Residues For Rural CommunitiesAnonymous Hy5Ir9QXNo ratings yet
- Application of A Dynamic Model To The Simulation of The Composting ProcessDocument10 pagesApplication of A Dynamic Model To The Simulation of The Composting ProcessAnonymous Hy5Ir9QXNo ratings yet
- Acs Est 6b06281Document10 pagesAcs Est 6b06281Md. Rashedul IslamNo ratings yet
- Kinetics of The Cao/Ca (Oh) Hydration/Dehydration Reaction For Thermochemical Energy Storage ApplicationsDocument33 pagesKinetics of The Cao/Ca (Oh) Hydration/Dehydration Reaction For Thermochemical Energy Storage ApplicationsAnonymous Hy5Ir9QXNo ratings yet
- Modelianje Emulgatora PDFDocument84 pagesModelianje Emulgatora PDFAnonymous Hy5Ir9QXNo ratings yet
- A Fuzzy Composting Process Model PDFDocument17 pagesA Fuzzy Composting Process Model PDFAnonymous Hy5Ir9QXNo ratings yet
- Lime Slakers: 8485 Parkhill Drive Milton, Ontario Canada L9T 5E9Document4 pagesLime Slakers: 8485 Parkhill Drive Milton, Ontario Canada L9T 5E9Anonymous Hy5Ir9QXNo ratings yet
- 2-1 Complete Recausticizing - Principles and PracticeDocument30 pages2-1 Complete Recausticizing - Principles and PracticeWiNo ratings yet
- Omega Series 41 Detention Slakers PDFDocument2 pagesOmega Series 41 Detention Slakers PDFsoumyarm942No ratings yet
- A Fuzzy Composting Process Model PDFDocument17 pagesA Fuzzy Composting Process Model PDFAnonymous Hy5Ir9QXNo ratings yet
- Detention Lime Slaker: Series 85Document2 pagesDetention Lime Slaker: Series 85Marcelo GuarachiNo ratings yet
- Heat Recovery From Composting A Comprehensive Review of System Design Recovery Rate and UtilizationDocument13 pagesHeat Recovery From Composting A Comprehensive Review of System Design Recovery Rate and UtilizationAnonymous Hy5Ir9QXNo ratings yet
- IM ModelingDocument27 pagesIM ModelingIrfan QureshiNo ratings yet
- Autoclave 1Document8 pagesAutoclave 1Ava RanpoNo ratings yet
- Modeling An Industrial Lime Slaking Process MatzDocument6 pagesModeling An Industrial Lime Slaking Process MatzAnonymous Hy5Ir9QXNo ratings yet
- Adaptive ControllerDocument15 pagesAdaptive Controllerasd dsaNo ratings yet
- Javascript Notes For ProfessionalsDocument490 pagesJavascript Notes For ProfessionalsDragos Stefan NeaguNo ratings yet
- A514229 PDFDocument116 pagesA514229 PDFAnonymous Hy5Ir9QXNo ratings yet
- Akarmak Autoclaves PDFDocument28 pagesAkarmak Autoclaves PDFAnonymous Hy5Ir9QXNo ratings yet
- Din 1045-1 Manual PDFDocument70 pagesDin 1045-1 Manual PDFAnonymous Hy5Ir9QXNo ratings yet
- Pressure Chamber PDFDocument1 pagePressure Chamber PDFAnonymous Hy5Ir9QXNo ratings yet
- Autoclave 1Document8 pagesAutoclave 1Ava RanpoNo ratings yet
- Equipment SizingDocument9 pagesEquipment SizingAnonymous Hy5Ir9QXNo ratings yet
- Computing With Fortran by Haselbacher PDFDocument202 pagesComputing With Fortran by Haselbacher PDFAnonymous Hy5Ir9QXNo ratings yet
- Robotics Dynamics and Equations of MotionDocument77 pagesRobotics Dynamics and Equations of MotionAnonymous Hy5Ir9QXNo ratings yet
- 2005 - Advanced Robotic Manipulation - OussamaKhatibDocument136 pages2005 - Advanced Robotic Manipulation - OussamaKhatibnachoflores214793No ratings yet
- Chain Pull CalculationsDocument39 pagesChain Pull Calculationsmech_abhi100% (2)
- Characteristics OF SEWAGEDocument10 pagesCharacteristics OF SEWAGEBalanlan PenalesNo ratings yet
- Mark DarcoDocument48 pagesMark DarcoMohammad QasimNo ratings yet
- Parts List - KTZ411-61Document4 pagesParts List - KTZ411-61Mahmoud ElboraeNo ratings yet
- LNG R&D For The Liquefaction and Regasification Processes: 1.theme DescriptionDocument9 pagesLNG R&D For The Liquefaction and Regasification Processes: 1.theme DescriptionVikas PatelNo ratings yet
- Bridge Deck BehaviourDocument327 pagesBridge Deck BehaviourJunwhan KimNo ratings yet
- Chapter4 Transceiver ArchitecturesDocument137 pagesChapter4 Transceiver ArchitecturesNikunj Shah100% (1)
- 878 Question PaperDocument2 pages878 Question PaperkunjanNo ratings yet
- Loadings and Sign Convention SummaryDocument9 pagesLoadings and Sign Convention SummaryGovindan KrishnamoorthybashyamNo ratings yet
- PFM-42-0 Document ReviewDocument9 pagesPFM-42-0 Document ReviewSIVAKUMAR NATARAJANNo ratings yet
- VIEWIT: Computation of Seen Areas, Slope, and Aspect For Land-Use PlanningDocument67 pagesVIEWIT: Computation of Seen Areas, Slope, and Aspect For Land-Use PlanningPACIFIC SOUTHWEST RESEARCH STATION REPORTNo ratings yet
- Jedec 22B112A 1Document30 pagesJedec 22B112A 1Shih Chien ChenNo ratings yet
- The Tower Undergraduate Research Journal Volume VI, Issue IDocument92 pagesThe Tower Undergraduate Research Journal Volume VI, Issue IThe Tower Undergraduate Research JournalNo ratings yet
- Thesis DocumentationDocument69 pagesThesis DocumentationKamiru ChanNo ratings yet
- Forced Degradation StudyDocument4 pagesForced Degradation StudyDavor ŠestanNo ratings yet
- Method Statement For Testing and Commissioning of Lightning Protection SystemDocument9 pagesMethod Statement For Testing and Commissioning of Lightning Protection Systemjfejfe0% (1)
- Master: The New Polypropylene Sewer Pipe SystemDocument6 pagesMaster: The New Polypropylene Sewer Pipe SystemFaraj MohamedNo ratings yet
- Astm2241 09 PDFDocument9 pagesAstm2241 09 PDFPaola MenaNo ratings yet
- Engineering Drawing: (NSQF) 1 YearDocument80 pagesEngineering Drawing: (NSQF) 1 YearAkshay Kumar KNo ratings yet
- Unit HydrographDocument31 pagesUnit Hydrographg7711637No ratings yet
- M.tech Petroleum EngineeringDocument2 pagesM.tech Petroleum EngineeringAqinwandeNo ratings yet
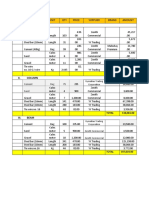
- Construction materials and supplies itemizationDocument7 pagesConstruction materials and supplies itemizationGintokiNo ratings yet
- Fabrication and Properties of Carbon Fiber PDFDocument35 pagesFabrication and Properties of Carbon Fiber PDFSalih ÜnalNo ratings yet
- 61 2022 Construction Schedule Manpower Utilization Equipment UtilizationDocument4 pages61 2022 Construction Schedule Manpower Utilization Equipment UtilizationEmpyrean Builders Corp.No ratings yet
- Jetking Rajajinagar MinDocument7 pagesJetking Rajajinagar MinNeha ShekarNo ratings yet
- Colonie Findings With AttmtDocument130 pagesColonie Findings With AttmtTown of Colonie LandfillNo ratings yet
- Government of Chhattisgarh: Ublic Orks EpartmentDocument19 pagesGovernment of Chhattisgarh: Ublic Orks EpartmentLucky ChopraNo ratings yet