You might also like
- Basic Parts or Elements of A RobotDocument3 pagesBasic Parts or Elements of A RobotRenjith RajendraprasadNo ratings yet
- End EffectersDocument4 pagesEnd EffectersSindhu BhaskarNo ratings yet
- Robotic End Effector NotesDocument24 pagesRobotic End Effector NotesTibebu MerideNo ratings yet
- ECE315-T15 - AT1 - (Cat2&Cat3) Name: Catamora, ER Denice D. Year and Course: ECE03Document2 pagesECE315-T15 - AT1 - (Cat2&Cat3) Name: Catamora, ER Denice D. Year and Course: ECE03er denice catamoraNo ratings yet
- Robots in Manufacturing: Applications and ImpactsDocument13 pagesRobots in Manufacturing: Applications and ImpactsdevashNo ratings yet
- Automated Forest Maintenance ManeuverDocument7 pagesAutomated Forest Maintenance Maneuveravik0381No ratings yet
- Robot End EffectorDocument7 pagesRobot End EffectorAnonymous Hy5Ir9QXNo ratings yet
- Project 1 SynopsisDocument6 pagesProject 1 SynopsisOm KhandaleNo ratings yet
- Nitin AssignmentDocument6 pagesNitin AssignmentNitin TantuwayNo ratings yet
- PP RoboticsDocument12 pagesPP RoboticsrahmathunnisamaNo ratings yet
- 1.1 Embedded DesignDocument14 pages1.1 Embedded DesignJanardan SarafdarNo ratings yet
- New Microsoft Word DocumentDocument6 pagesNew Microsoft Word DocumentNikhil AshokNo ratings yet
- Robotics Assignment-1Document7 pagesRobotics Assignment-1Mudit SharmaNo ratings yet
- Prash Robotics UpdatedDocument152 pagesPrash Robotics Updatedpreethu02No ratings yet
- Rohini 90748460674Document9 pagesRohini 90748460674Suthin .vNo ratings yet
- Robo 2Document10 pagesRobo 2mitulshah18No ratings yet
- Industrial Robots: Presented By: Sachin Dhopade B.E Iv/Iv PH No. 09866584839 Mechanical Engineering (Production) MVSRDocument34 pagesIndustrial Robots: Presented By: Sachin Dhopade B.E Iv/Iv PH No. 09866584839 Mechanical Engineering (Production) MVSRSachin DhopadeNo ratings yet
- E Torres J Humanoid 2005Document6 pagesE Torres J Humanoid 2005Mauricio Huacho ChecaNo ratings yet
- Robotics Review 1Document16 pagesRobotics Review 1MARC DOMINIC SARABUSINGNo ratings yet
- Unit1-Work Envelope, Workspaceand FullDocument13 pagesUnit1-Work Envelope, Workspaceand FullBarvinNo ratings yet
- Riassunti IngleseDocument3 pagesRiassunti Inglesesamuelecerini19No ratings yet
- Types of End Effectors Rajesh MallelaDocument36 pagesTypes of End Effectors Rajesh MallelaHussain YousifNo ratings yet
- EC8074 Unit 3Document5 pagesEC8074 Unit 3lvrevathiNo ratings yet
- Dhairya RoboticDocument8 pagesDhairya Roboticmitulshah18No ratings yet
- 8 Robotic GrippersDocument25 pages8 Robotic GrippersAdam MahmoodNo ratings yet
- DocumentDocument2 pagesDocumentShekhar SharmaNo ratings yet
- OIE 751 ROBOTICS Unit 2 Class 3 (03-9-2020)Document12 pagesOIE 751 ROBOTICS Unit 2 Class 3 (03-9-2020)MICHEL RAJNo ratings yet
- Robotik End Effector NotesDocument51 pagesRobotik End Effector NotesayushdbcNo ratings yet
- Ec368 Robotics: 1.Introduction-Definition and Origin of RoboticsDocument21 pagesEc368 Robotics: 1.Introduction-Definition and Origin of RoboticsRajeesh JNo ratings yet
- ROBOTICSDocument13 pagesROBOTICSREY SELWYN MANALANGNo ratings yet
- Project Report On Robotic ArmDocument17 pagesProject Report On Robotic ArmGina SreeNo ratings yet
- Me3403-Robotics and Machine Vision SystemDocument19 pagesMe3403-Robotics and Machine Vision SystemSengottaiyan MalaisamyNo ratings yet
- Understanding End EffectorsDocument18 pagesUnderstanding End EffectorsAshwin BuddharajuNo ratings yet
- Robotics Unit 1 NotesDocument20 pagesRobotics Unit 1 NotesKirthivasanNo ratings yet
- End Effectors: Presented by S.K.Nitharshana JuvalaDocument22 pagesEnd Effectors: Presented by S.K.Nitharshana JuvalaNitharshana JuvalaNo ratings yet
- Robot End Effectors GuideDocument10 pagesRobot End Effectors GuidemathankumarjkkNo ratings yet
- Materials, Parts, Tools or Specialized Devices Through Variable Programmed Motions For The Performance of A Variety of Tasks"Document38 pagesMaterials, Parts, Tools or Specialized Devices Through Variable Programmed Motions For The Performance of A Variety of Tasks"kamalahasanmNo ratings yet
- Paper Presentation ON Robotics: PresentedDocument10 pagesPaper Presentation ON Robotics: PresentedNandigama VagdeviNo ratings yet
- Robot End Effectors: DR V S KrushnasamyDocument48 pagesRobot End Effectors: DR V S KrushnasamyKrushnasamy SuramaniyanNo ratings yet
- What Is Robotics? The Science and Technology Behind RobotsDocument36 pagesWhat Is Robotics? The Science and Technology Behind RobotsWajdi SadiqNo ratings yet
- Robotic Soldering ArmDocument53 pagesRobotic Soldering Armnihalmullaa100% (4)
- Fundamentals of RobotsDocument46 pagesFundamentals of RobotsElvis OmondiNo ratings yet
- Bahir Dar Institute of Technology (BIT) Introduction To Robotics and AutomationDocument24 pagesBahir Dar Institute of Technology (BIT) Introduction To Robotics and AutomationBelayneh BirhanNo ratings yet
- Multi-fingered Robot Hand DesignDocument6 pagesMulti-fingered Robot Hand DesignscrinpowerNo ratings yet
- Fundamental of Robotic ManipulatorDocument101 pagesFundamental of Robotic ManipulatorswapnakaleNo ratings yet
- Design of a gripping system for automated assembly of large building modulesDocument8 pagesDesign of a gripping system for automated assembly of large building modulesVeronicaNistorNo ratings yet
- Robotics Unit-2 Important QuestionsDocument12 pagesRobotics Unit-2 Important QuestionsBEN G.YNo ratings yet
- JKP Robo PDocument3 pagesJKP Robo Pmitulshah18No ratings yet
- Robotic HandDocument13 pagesRobotic HandRoshan DodiyaNo ratings yet
- Gripper Mechanism: Department of Mechanical EngineeringDocument16 pagesGripper Mechanism: Department of Mechanical EngineeringSoumik DasNo ratings yet
- Presented By: B.Tech (Mechanical Engineering) Mr. K. Sunil Kumar, M.Tech Assistant ProfessorDocument22 pagesPresented By: B.Tech (Mechanical Engineering) Mr. K. Sunil Kumar, M.Tech Assistant Professorsarath chandra satuluriNo ratings yet
- Addis Ababa Science and Technology University (Aastu) Industrial Automation and Introduction To RoboticsDocument23 pagesAddis Ababa Science and Technology University (Aastu) Industrial Automation and Introduction To RoboticsrrhoshackNo ratings yet
- Project Report On Robotic ArmDocument8 pagesProject Report On Robotic Armpramo_dassNo ratings yet
- Chapter One: Pneumatic Assempling Robotic ArmDocument13 pagesChapter One: Pneumatic Assempling Robotic ArmMahmoud AbdulAzizNo ratings yet
- AASTU Robotics Chapter 1: Introduction (40chDocument23 pagesAASTU Robotics Chapter 1: Introduction (40chbereketab mulugetaNo ratings yet
- 4164 5995 1 PBDocument7 pages4164 5995 1 PBmohamed rizwanNo ratings yet
- Rob Lect-1 (Introduction) PDFDocument35 pagesRob Lect-1 (Introduction) PDFAhmed gamal ebiedNo ratings yet
- Robotics Technology: Presented By: Erika Marie M. Martinez Bspsych 1-ADocument14 pagesRobotics Technology: Presented By: Erika Marie M. Martinez Bspsych 1-AAlli MariaNo ratings yet
- Unit I INTRODUCTION AND ROBOT KINEMATICSDocument11 pagesUnit I INTRODUCTION AND ROBOT KINEMATICShicet mechhodNo ratings yet
- Pengajuan Alat Otomotif 2019Document22 pagesPengajuan Alat Otomotif 2019Robby AnwarNo ratings yet
- Extensive Notes On Linkages Chapter 2Document57 pagesExtensive Notes On Linkages Chapter 2Ert TubeNo ratings yet
- Chapter Two: 2.coupling, Clutch & BrakeDocument79 pagesChapter Two: 2.coupling, Clutch & BrakeEskinder Markos Official ChannelNo ratings yet
- 124MBZ MicrómetroDocument1 page124MBZ MicrómetroCesar ArgandonaNo ratings yet
- Saeco HD 8323 REPAIR PartsDocument3 pagesSaeco HD 8323 REPAIR PartsÁkos FüttyNo ratings yet
- Special Purpose Lathes: Manufacturing Technology and Surface EngineeringDocument15 pagesSpecial Purpose Lathes: Manufacturing Technology and Surface EngineeringKarthi KeyanNo ratings yet
- Plumbing Materials and Various ToolsDocument8 pagesPlumbing Materials and Various ToolsJayson G. GunioNo ratings yet
- Spare Parts Manual of AM6 SHN RH VERSION, Doc - No. 80154016, Edition - Jun'10 PDFDocument107 pagesSpare Parts Manual of AM6 SHN RH VERSION, Doc - No. 80154016, Edition - Jun'10 PDFMohammad Aslam100% (1)
- Timber Cutting: Plate 1.0: Vertical Band Saw ManualDocument12 pagesTimber Cutting: Plate 1.0: Vertical Band Saw Manualnoorfadzlida kamisNo ratings yet
- Rab Igm Dan Hydrant Rsud Kolaka Timurr 2023Document8 pagesRab Igm Dan Hydrant Rsud Kolaka Timurr 2023Asriawan darangaNo ratings yet
- Tools ListDocument3 pagesTools ListimuNo ratings yet
- ControlsDocument4 pagesControlsAlexandre Calil SalesNo ratings yet
- Report Penilaian Implementasi TPM Bulan Desember 2022 PDFDocument69 pagesReport Penilaian Implementasi TPM Bulan Desember 2022 PDFrandi trinandaNo ratings yet
- Design Report on Rigid and Flexible CouplingsDocument11 pagesDesign Report on Rigid and Flexible CouplingsOm Ashok SharmaNo ratings yet
- Nutrition - Conversion and Kitchen UtensilsDocument3 pagesNutrition - Conversion and Kitchen Utensilscharles estradaNo ratings yet
- List of Tools EimDocument3 pagesList of Tools EimMichael Angelo ChuaNo ratings yet
- Trane PresentationDocument52 pagesTrane PresentationMohammed AlhddarNo ratings yet
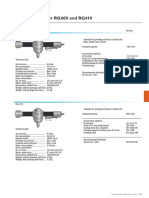
- Grinding Button Bit Grinders RG400 RG410Document1 pageGrinding Button Bit Grinders RG400 RG410Juan De la cruz EncarnacionNo ratings yet
- Automatic Tank Temperature SystemDocument6 pagesAutomatic Tank Temperature SystemShariq ZeibNo ratings yet
- Metrology: Floating Carriage Laboratory AssignmentsDocument7 pagesMetrology: Floating Carriage Laboratory AssignmentsRhys LambadariosNo ratings yet
- Tantal Sporter, AK-74 Rifle, Owners ManualDocument12 pagesTantal Sporter, AK-74 Rifle, Owners ManualRobert WilliamsNo ratings yet
- Ballpeenhammer FDocument15 pagesBallpeenhammer FnickoleNo ratings yet
- Web CatalogDocument85 pagesWeb CatalogJorge TCNo ratings yet
- PROFILE MILLING - Creo4Document73 pagesPROFILE MILLING - Creo4Rabindranath HardeoNo ratings yet
- Hydraulic and mechanical latch head part listsDocument1 pageHydraulic and mechanical latch head part listsElderNo ratings yet
- Norma Rifle Data ReloadingDocument90 pagesNorma Rifle Data ReloadingFitzwalterNo ratings yet
- 81W12186 (P12136) Parts Manual For LGT360-English VersionDocument141 pages81W12186 (P12136) Parts Manual For LGT360-English VersionMARIO FABRISNo ratings yet
- 20x102 Experimental FN Sabot 15mm BallisticsDocument4 pages20x102 Experimental FN Sabot 15mm BallisticsEnrico959No ratings yet
- Mitutoyo 2019Document217 pagesMitutoyo 2019arubinaldoNo ratings yet
- Chapter 03 Tools and FastenersDocument5 pagesChapter 03 Tools and FastenersRajvir GrewalNo ratings yet