You might also like
- An Excercise in Magical Handcraft: Creating Trithemius' Table of PracticeDocument16 pagesAn Excercise in Magical Handcraft: Creating Trithemius' Table of Practicesolmi0% (1)
- Automotive Abbreviations PDFDocument40 pagesAutomotive Abbreviations PDFGonzalo Valera100% (1)
- James Lewis - Witchcraft Today An Encyclopedia of Wiccan and Neopagan TraditionsDocument424 pagesJames Lewis - Witchcraft Today An Encyclopedia of Wiccan and Neopagan Traditionsdivinskry100% (2)
- Proposed Two - Storey Residential Building: Republic of The PhilippinesDocument19 pagesProposed Two - Storey Residential Building: Republic of The PhilippinesMaybelline DipasupilNo ratings yet
- Biology Question Bank GSB-1Document957 pagesBiology Question Bank GSB-1mk100% (3)
- Swami SivanandaDocument276 pagesSwami SivanandaJames Herring100% (1)
- Electro Shema Range Rover 1999onDocument611 pagesElectro Shema Range Rover 1999onАлексей ЛопаткоNo ratings yet
- Solve Ode Pde Using MatlabDocument27 pagesSolve Ode Pde Using MatlabSaddy KhanNo ratings yet
- Machine Learning With Max/mspDocument6 pagesMachine Learning With Max/mspOnur Dülger100% (1)
- Ce268 General Surveying Measurement of Angles and DirectionsDocument28 pagesCe268 General Surveying Measurement of Angles and DirectionsCasalta KennethNo ratings yet
- Baited Hole NooseDocument62 pagesBaited Hole NooseDaVinci1973No ratings yet
- Kunkletabla Seleccion PSVDocument12 pagesKunkletabla Seleccion PSVedwinmenaNo ratings yet
- Automl: A Survey of The State-Of-The-ArtDocument37 pagesAutoml: A Survey of The State-Of-The-ArtJNo ratings yet
- Large Graph Models: A Perspective: Ziwei Zhang, Haoyang Li, Zeyang Zhang, Yijian Qin, Xin Wang, Wenwu ZhuDocument23 pagesLarge Graph Models: A Perspective: Ziwei Zhang, Haoyang Li, Zeyang Zhang, Yijian Qin, Xin Wang, Wenwu ZhuChu ChítNo ratings yet
- Advanced Materials - 2024 - NG - Progress and Opportunities For Machine Learning in Materials and Processes of AdditiveDocument56 pagesAdvanced Materials - 2024 - NG - Progress and Opportunities For Machine Learning in Materials and Processes of AdditiveJyotisMan BorahNo ratings yet
- Mathematics: Solving Regression Problems With Intelligent Machine Learner For Engineering InformaticsDocument25 pagesMathematics: Solving Regression Problems With Intelligent Machine Learner For Engineering Informaticsleele wolfNo ratings yet
- A General Framework of High-Performance Machine LeDocument26 pagesA General Framework of High-Performance Machine LeMahdi MahnazNo ratings yet
- AutoSmart An Efficient and Automatic Machine LearnDocument9 pagesAutoSmart An Efficient and Automatic Machine LearnMiguel A. Bernal AyalaNo ratings yet
- Risks: Machine Learning in P&C Insurance: A Review For Pricing and ReservingDocument26 pagesRisks: Machine Learning in P&C Insurance: A Review For Pricing and ReservingHouda MannaiNo ratings yet
- 30 - The Future of Human-AI Collaboration - Dellermann - 2021 - ResaltadoDocument10 pages30 - The Future of Human-AI Collaboration - Dellermann - 2021 - ResaltadoOpen Box LaptopsNo ratings yet
- Dellermann 2019 HuAI PDFDocument10 pagesDellermann 2019 HuAI PDFJerimNo ratings yet
- Robotics 13 00012Document29 pagesRobotics 13 00012Akash BachharNo ratings yet
- Representation Learning On Graphs MethodsDocument24 pagesRepresentation Learning On Graphs MethodsVishal D MishraNo ratings yet
- Machine Learning Mining CompaniesDocument5 pagesMachine Learning Mining CompaniesCristian Sardón rojasNo ratings yet
- Role of Machine Learning in The Field of Fiber Reinforced PolymerDocument6 pagesRole of Machine Learning in The Field of Fiber Reinforced PolymersudhirNo ratings yet
- Learn GenDocument24 pagesLearn GenMaham TanveerNo ratings yet
- A Survey of Machine Learning Methods For Iot and Their Future ApplicationsDocument5 pagesA Survey of Machine Learning Methods For Iot and Their Future ApplicationsElmustafa Sayed Ali AhmedNo ratings yet
- Deep Learning: Emerging Trends, Applications and Research ChallengesDocument4 pagesDeep Learning: Emerging Trends, Applications and Research ChallengessamirNo ratings yet
- Sustainability 14 15292 v2Document19 pagesSustainability 14 15292 v2nutirabiskaNo ratings yet
- Evaluation and Comparison of AutoML Approaches and ToolsDocument9 pagesEvaluation and Comparison of AutoML Approaches and ToolsMathias RosasNo ratings yet
- Graph Neural Architecture Search A SurveyDocument17 pagesGraph Neural Architecture Search A SurveyAli KhanNo ratings yet
- Machine Learning in Additive Manufacturing State-Of-The-Art and PerspectivesDocument20 pagesMachine Learning in Additive Manufacturing State-Of-The-Art and PerspectivesmohNo ratings yet
- A New Platform For DistributedDocument19 pagesA New Platform For DistributedNITINNo ratings yet
- Modelscope-Agent: Building Your Customizable Agent System With Open-Source Large Language ModelsDocument13 pagesModelscope-Agent: Building Your Customizable Agent System With Open-Source Large Language ModelsbilletonNo ratings yet
- Seminar On Machine Learning and AiDocument15 pagesSeminar On Machine Learning and AiOlatunde LekanNo ratings yet
- Nsdi17 XiaoDocument15 pagesNsdi17 XiaoArnob TanjimNo ratings yet
- Machine Learning Techniques For Civil Engineering ProblemsDocument28 pagesMachine Learning Techniques For Civil Engineering ProblemsMd Kaiser HamidNo ratings yet
- Machine Learning - Ground Breaking PerspectiveDocument28 pagesMachine Learning - Ground Breaking PerspectivecoderNo ratings yet
- 282.A Survey On Machine Learning ConceptDocument9 pages282.A Survey On Machine Learning Conceptsolifugae123No ratings yet
- Static Graph Challenge: Subgraph IsomorphismDocument6 pagesStatic Graph Challenge: Subgraph IsomorphismDay SadNo ratings yet
- Automated Machine Learning AI-driven Decision Making in Business AnalyticsDocument7 pagesAutomated Machine Learning AI-driven Decision Making in Business AnalyticsankitkantsaxenaNo ratings yet
- Artificial Intelligence Applied To Software TestingDocument7 pagesArtificial Intelligence Applied To Software TestingFaizal AzmanNo ratings yet
- 1 s2.0 S2772991523000038 MainDocument15 pages1 s2.0 S2772991523000038 MainMusab Aied Qissab Al-JanabiNo ratings yet
- Combinatorial Optimization and Reasoning With Graph Neural NetworksDocument8 pagesCombinatorial Optimization and Reasoning With Graph Neural NetworksJhon Kennedy QueirozNo ratings yet
- 3Document13 pages3Quinone QuentinNo ratings yet
- A Detailed Excursion On Machine Learning Approach, Algorithms and ApplicationsDocument8 pagesA Detailed Excursion On Machine Learning Approach, Algorithms and Applicationsviju001No ratings yet
- p7 AmmarDocument5 pagesp7 Ammar王越No ratings yet
- Machine Learning in Artificial Intelligence: Towards A Common UnderstandingDocument10 pagesMachine Learning in Artificial Intelligence: Towards A Common UnderstandingKeerthi KumarNo ratings yet
- Recognizing Traffic Signs With Synthetic Data and Deep LearningDocument9 pagesRecognizing Traffic Signs With Synthetic Data and Deep LearningbijcicnjournalNo ratings yet
- A Review On Automated Machine Learning (AutoML) SystemsDocument6 pagesA Review On Automated Machine Learning (AutoML) SystemsMathias RosasNo ratings yet
- The Basics of Machine Learning - Element14Document16 pagesThe Basics of Machine Learning - Element14Technical NoviceNo ratings yet
- Whitepaper MLDocument4 pagesWhitepaper MLharichigurupatiNo ratings yet
- A Survey of Fuzzy Cognitive Maps Forecasting MethodsDocument6 pagesA Survey of Fuzzy Cognitive Maps Forecasting MethodsAlbaLiNo ratings yet
- Florez Perez - 015 - ISARC 2022 - Paper - 49Document8 pagesFlorez Perez - 015 - ISARC 2022 - Paper - 49justregist00No ratings yet
- Learning in Robotics: International Journal of Computer Applications January 2017Document5 pagesLearning in Robotics: International Journal of Computer Applications January 2017Ravi SrinivasNo ratings yet
- 1 s2.0 S1566253523002567 MainDocument24 pages1 s2.0 S1566253523002567 MainsaifNo ratings yet
- M C GPT: A GPT: Y Runch Chat Assisted Framework For Scientific Machine LearningDocument22 pagesM C GPT: A GPT: Y Runch Chat Assisted Framework For Scientific Machine LearningprfdjkdkvcssdNo ratings yet
- Machine Learning and Artificial Neural Network Accelerated Computational Discoveries in Materials ScienceDocument21 pagesMachine Learning and Artificial Neural Network Accelerated Computational Discoveries in Materials Sciencemona nazeriNo ratings yet
- Model-Driven Software Engineering: Map-I Programa Doutoral em Inform AticaDocument15 pagesModel-Driven Software Engineering: Map-I Programa Doutoral em Inform AticaŞuteu Victor ŞtefanNo ratings yet
- Brief Study On Machine Learning: October 2020Document7 pagesBrief Study On Machine Learning: October 2020miqdadNo ratings yet
- TAILLANDIER Building, Composing and Experimenting Complex SpatialDocument24 pagesTAILLANDIER Building, Composing and Experimenting Complex SpatialManuel BalagueraNo ratings yet
- Research Article: Urban Planning and Design Layout Generation Based On Artificial IntelligenceDocument10 pagesResearch Article: Urban Planning and Design Layout Generation Based On Artificial Intelligencefirman afriantoNo ratings yet
- Computing Graph Neural Networks: A Survey From Algorithms To AcceleratorsDocument38 pagesComputing Graph Neural Networks: A Survey From Algorithms To Acceleratorstung2303.gradNo ratings yet
- E A M L D - G: Fficient Utomatic Achine Earning Via E Sign RaphsDocument21 pagesE A M L D - G: Fficient Utomatic Achine Earning Via E Sign Raphschin keong HoNo ratings yet
- AutoML-GPT - Automatic Machine Learning With GPTDocument11 pagesAutoML-GPT - Automatic Machine Learning With GPT宋强No ratings yet
- Machine Learning in Antenna DesignDocument9 pagesMachine Learning in Antenna Designsakthisaravanan0504No ratings yet
- A Multi-Level Framework For Scalable Graph EmbeddingDocument13 pagesA Multi-Level Framework For Scalable Graph EmbeddingAbhaya Kumar SahooNo ratings yet
- A Comparative Survey of Big Data Computing and HPCDocument38 pagesA Comparative Survey of Big Data Computing and HPCsalah nuraNo ratings yet
- Missing Child 3Document2 pagesMissing Child 3mohsin asmaNo ratings yet
- AutoMl Zero PDFDocument23 pagesAutoMl Zero PDFmsm74No ratings yet
- MATHEMATICAL FOUNDATIONS OF MACHINE LEARNING: Unveiling the Mathematical Essence of Machine Learning (2024 Guide for Beginners)From EverandMATHEMATICAL FOUNDATIONS OF MACHINE LEARNING: Unveiling the Mathematical Essence of Machine Learning (2024 Guide for Beginners)No ratings yet
- 7ML19985FS62 3Document56 pages7ML19985FS62 3Natasa SindjelicNo ratings yet
- M Tech 2 Sem SyllbusDocument14 pagesM Tech 2 Sem Syllbusnchandrasekhar418No ratings yet
- Brochure - CHEMBIOEN-2020 64441 PDFDocument2 pagesBrochure - CHEMBIOEN-2020 64441 PDFMayurkumar patilNo ratings yet
- Infraworks Untuk Modeling Dan AnimasiDocument2 pagesInfraworks Untuk Modeling Dan AnimasiWira MaulanaNo ratings yet
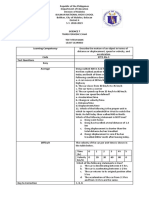
- Item Bank FIRSTQDocument3 pagesItem Bank FIRSTQRaymond Reyes CuribangNo ratings yet
- NAME: Mildred R. Cajucom Grade & Section: 12 - Jacinto SUBJECT: Personal Development MODULE 1: Knowing OneselfDocument38 pagesNAME: Mildred R. Cajucom Grade & Section: 12 - Jacinto SUBJECT: Personal Development MODULE 1: Knowing OneselfAngelrose AbrisNo ratings yet
- Suganuma Durigan 2021Document10 pagesSuganuma Durigan 2021Claudio SantanaNo ratings yet
- FINAL ReportDocument48 pagesFINAL ReportMythri RangaswamyNo ratings yet
- ACIS Catal 2023 en Tarif Sstel CompressedDocument156 pagesACIS Catal 2023 en Tarif Sstel CompressedVojkan JovicicNo ratings yet
- 2 Flexural Performance of SIFCON Composites Subjected To High TemperatureDocument10 pages2 Flexural Performance of SIFCON Composites Subjected To High Temperaturemsheer hasanNo ratings yet
- Letra 'Always' 'It'S My Life'Document1 pageLetra 'Always' 'It'S My Life'César Cabrejos AlvaradoNo ratings yet
- Article 2 DraftDocument9 pagesArticle 2 DraftTESL3-0620 Nur Kartika Damia Mohd Affendey Binti Abdul AzizNo ratings yet
- Topic: Vidya Pratishthan'sDocument11 pagesTopic: Vidya Pratishthan'sJalo SutariNo ratings yet
- AWG為基礎之分波多工/分時多 The Designs of AWG Based WDM/TDM PON ArchitectureDocument85 pagesAWG為基礎之分波多工/分時多 The Designs of AWG Based WDM/TDM PON ArchitectureMINVIELLENo ratings yet
- Persiapan Pasien RadiotherapyDocument12 pagesPersiapan Pasien RadiotherapyadhetriputriNo ratings yet
- 02-ToE-C945-111 - Service Manual Motoman K6S K10SDocument36 pages02-ToE-C945-111 - Service Manual Motoman K6S K10SBayron López CastilloNo ratings yet
- Photosynthesis Lab Report ExampleDocument2 pagesPhotosynthesis Lab Report ExampleTiffany RishiNo ratings yet
- Uv Spectrophotometric Determination of Ranitidine Hydrochloride in Pure and Pharmaceutical FormulationDocument3 pagesUv Spectrophotometric Determination of Ranitidine Hydrochloride in Pure and Pharmaceutical FormulationDaniela PopaNo ratings yet
- 04-Power of Persuasion Summary 04 Decision MakingDocument2 pages04-Power of Persuasion Summary 04 Decision Makingacido255No ratings yet