You might also like
- Technical Data Sheet: Davies Powerfloor Epoxy Floor CoatingDocument1 pageTechnical Data Sheet: Davies Powerfloor Epoxy Floor CoatingEnoki LiNo ratings yet
- URLLC IEEETOWC 2021 PsDocument16 pagesURLLC IEEETOWC 2021 PsTsega TeklewoldNo ratings yet
- Wireless Information Assurance and Cooperative CommunicationsDocument20 pagesWireless Information Assurance and Cooperative Communicationsapi-3844521No ratings yet
- Wireless Network Behaviour During Jamming Attacks Simulation Using OPNETDocument16 pagesWireless Network Behaviour During Jamming Attacks Simulation Using OPNETAlmaeeny AlameenNo ratings yet
- Physical Layer Components Security Risks in OpticalDocument15 pagesPhysical Layer Components Security Risks in OpticalSteven MuñozNo ratings yet
- MIMO in 3G Cellular Systems: Challenges and Future DirectionsDocument19 pagesMIMO in 3G Cellular Systems: Challenges and Future DirectionsreshmareddytNo ratings yet
- Meliorated Detection Mechanism For The Detection of Physical Jamming Attacks Under Aodv and DSR Protocols in ManetsDocument11 pagesMeliorated Detection Mechanism For The Detection of Physical Jamming Attacks Under Aodv and DSR Protocols in ManetsInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- An Overview of Massive MIMO Benefits and PDFDocument17 pagesAn Overview of Massive MIMO Benefits and PDFManabRajakNo ratings yet
- Free-Space Optical MIMO Transmission With Q-Ary PPMDocument11 pagesFree-Space Optical MIMO Transmission With Q-Ary PPMHusam Abduldaem MohammedNo ratings yet
- 2021 AnEvolutionaryBasedApproachForLowComplexityIntrusionDetectionInWirelessSensorNetworksAM-MARINODocument20 pages2021 AnEvolutionaryBasedApproachForLowComplexityIntrusionDetectionInWirelessSensorNetworksAM-MARINOPrakash ArumugamNo ratings yet
- Physical-Layer Security of SIMO CommunicationDocument14 pagesPhysical-Layer Security of SIMO CommunicationÖzkan SezerNo ratings yet
- Jamming Attacks Prevention in Wireless Networks Using Packet Hiding MethodsDocument8 pagesJamming Attacks Prevention in Wireless Networks Using Packet Hiding MethodsInternational Organization of Scientific Research (IOSR)No ratings yet
- Shyam G1Document6 pagesShyam G1swapnil jainNo ratings yet
- TCCN 2018 2877998Document18 pagesTCCN 2018 2877998javadNo ratings yet
- Hacking The Waveform: Generalized Wireless Adversarial Deep LearningDocument30 pagesHacking The Waveform: Generalized Wireless Adversarial Deep LearningJoel Eljo Enciso SaraviaNo ratings yet
- Large System Analysis of Power Normalization Techniques in Massive MIMODocument13 pagesLarge System Analysis of Power Normalization Techniques in Massive MIMOSoumitra BhowmickNo ratings yet
- Ieee Tit Outage2008Document21 pagesIeee Tit Outage2008Husam Abduldaem MohammedNo ratings yet
- MANET Study: Security Threats and Counter MeasureDocument12 pagesMANET Study: Security Threats and Counter MeasureInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Effects of Denial-of-Sleep Attacks On Wireless Sensor Network MAC ProtocolsDocument14 pagesEffects of Denial-of-Sleep Attacks On Wireless Sensor Network MAC ProtocolskhoufaNo ratings yet
- On Number of Almost Blank Subframes in Heterogeneous Cellular NetworksDocument30 pagesOn Number of Almost Blank Subframes in Heterogeneous Cellular NetworksJahnValjahnNo ratings yet
- Performance Analysis of Massive MIMO For Cell-Boundary UsersDocument15 pagesPerformance Analysis of Massive MIMO For Cell-Boundary UsersFakhar AbbasNo ratings yet
- Learning Based Mechanisms For Interference Mitigation in Self-Organized Femtocell NetworksDocument5 pagesLearning Based Mechanisms For Interference Mitigation in Self-Organized Femtocell NetworksArashVahabpourNo ratings yet
- Adaptive Feedback Channel ChangeDocument5 pagesAdaptive Feedback Channel ChangeQuratulain KalhoroNo ratings yet
- Pilot Decontamination Approach in Massive Mi Mo SystemsDocument11 pagesPilot Decontamination Approach in Massive Mi Mo Systemsmohamedezzelden30No ratings yet
- Investigation of Signal and Message Manipulations On The Wireless ChannelDocument20 pagesInvestigation of Signal and Message Manipulations On The Wireless ChannelaaamoumenaaaaNo ratings yet
- Beamforming and Power Splitting Designs For AN-aided Secure Multi-User MIMO SWIPT SystemsDocument14 pagesBeamforming and Power Splitting Designs For AN-aided Secure Multi-User MIMO SWIPT Systemshendra lamNo ratings yet
- Adaptover: Adaptive Overshadowing Attacks in Cellular NetworksDocument13 pagesAdaptover: Adaptive Overshadowing Attacks in Cellular NetworksccnrrynNo ratings yet
- Censoring Sensors6 PDFDocument11 pagesCensoring Sensors6 PDFRex JimNo ratings yet
- Dawwsen: A Defense Mechanism Against Wormhole Attacks in Wireless Sensor NetworksDocument10 pagesDawwsen: A Defense Mechanism Against Wormhole Attacks in Wireless Sensor NetworksAzhagu SubhaNo ratings yet
- Lockpicking Physical Layer Key Exchange: Weak Adversary Models Invite The ThiefDocument11 pagesLockpicking Physical Layer Key Exchange: Weak Adversary Models Invite The ThiefREGINALDO BORIKO OKOMO NGUEMANo ratings yet
- Aeue 50649Document6 pagesAeue 50649Стефан ПанићNo ratings yet
- Distributed Pilot Assignment For Distributed Massive-MIMO NetworksDocument15 pagesDistributed Pilot Assignment For Distributed Massive-MIMO Networksmohamedezzelden30No ratings yet
- The EM Side-Channel: Attacks and AssessmentDocument42 pagesThe EM Side-Channel: Attacks and AssessmentTaimur MusharrafNo ratings yet
- Secure Transmission Power of Cognitive Radios For Dynamic Spectrum Access ApplicationsDocument6 pagesSecure Transmission Power of Cognitive Radios For Dynamic Spectrum Access ApplicationswasiullahNo ratings yet
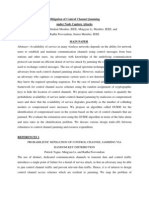
- Literature Survey by M.arunprabu (Mitigation of Control Channel Jamming)Document8 pagesLiterature Survey by M.arunprabu (Mitigation of Control Channel Jamming)arunprabu123No ratings yet
- Security in Optical NetworksDocument21 pagesSecurity in Optical NetworksDivonikaNo ratings yet
- 6 CIIMA 7-4-07 Yan 17-28Document12 pages6 CIIMA 7-4-07 Yan 17-28ShaliniRameshNo ratings yet
- A Flow Based Detection Mechanism Against Flooding Attacks in Mobile Ad Hoc NetworksDocument6 pagesA Flow Based Detection Mechanism Against Flooding Attacks in Mobile Ad Hoc NetworkspandianbharathiNo ratings yet
- Am 03402220229Document8 pagesAm 03402220229International Journal of computational Engineering research (IJCER)No ratings yet
- Security Sliding Mode Control of Interval Type-2 Fuzzy Systems Subject To Cyber Attacks The Stochastic Communication Protocol CaseDocument12 pagesSecurity Sliding Mode Control of Interval Type-2 Fuzzy Systems Subject To Cyber Attacks The Stochastic Communication Protocol CaseAHMADNo ratings yet
- Cascaded Channel Estimation For Large Intelligent Metasurface Assisted Massive MIMODocument5 pagesCascaded Channel Estimation For Large Intelligent Metasurface Assisted Massive MIMO郭zlNo ratings yet
- Security Attacks Against The Availability of LTE Mobile Networks PDFDocument9 pagesSecurity Attacks Against The Availability of LTE Mobile Networks PDFNikNo ratings yet
- Physical Layer AttacksDocument25 pagesPhysical Layer AttacksARCC2030No ratings yet
- Moving-Target Defense Against Cyber-Physical Attacks in Power Grids Via Game TheoryDocument13 pagesMoving-Target Defense Against Cyber-Physical Attacks in Power Grids Via Game TheoryAmal HamadaNo ratings yet
- Research Article: Network Traffic Anomaly Detection Based On ML-ESN For Power Metering SystemDocument21 pagesResearch Article: Network Traffic Anomaly Detection Based On ML-ESN For Power Metering Systemmichael dapoNo ratings yet
- Remove Some Noise: On Pre-Processing of Side-Channel Measurements With AutoencodersDocument27 pagesRemove Some Noise: On Pre-Processing of Side-Channel Measurements With AutoencodersRHUENo ratings yet
- A Study On Pseudo CRS Signal Jamming Attacks in LTE NetworkDocument4 pagesA Study On Pseudo CRS Signal Jamming Attacks in LTE NetworkÖzgür ErtuğNo ratings yet
- Enhancing PHY-Security of FD-Enabled NOMA Systems Using Jamming and User Selection Performance Analysis and DNN EvaluationDocument19 pagesEnhancing PHY-Security of FD-Enabled NOMA Systems Using Jamming and User Selection Performance Analysis and DNN EvaluationprazetyoNo ratings yet
- Secure State Estimation of Singularly Perturbed Switched Systems With Output Deception Attack Via Discretized LKF ApproachDocument5 pagesSecure State Estimation of Singularly Perturbed Switched Systems With Output Deception Attack Via Discretized LKF ApproachBharathNo ratings yet
- The Discovery of Jamming Attackers in Wireless Sensor NetworksDocument9 pagesThe Discovery of Jamming Attackers in Wireless Sensor NetworksAparupa DasguptaNo ratings yet
- Jamming and Network Restoration On Multi Channel Wireless Sensor NetworksDocument5 pagesJamming and Network Restoration On Multi Channel Wireless Sensor NetworksRakeshconclaveNo ratings yet
- VLSI Design 2006Document7 pagesVLSI Design 2006Velluru LokeshNo ratings yet
- Entropy: An Overview of Key Technologies in Physical Layer SecurityDocument34 pagesEntropy: An Overview of Key Technologies in Physical Layer Securitykashi fuuastNo ratings yet
- Security Threats, Detection, and Countermeasures For Physical Layer in Cognitive Radio Network A SurveyDocument19 pagesSecurity Threats, Detection, and Countermeasures For Physical Layer in Cognitive Radio Network A SurveyJuan Esteban Bolívar DurangoNo ratings yet
- Massive MIMO For Maximal Spectral EfficiencyDocument16 pagesMassive MIMO For Maximal Spectral EfficiencykiranpatruduNo ratings yet
- Towards A Framework For Cyber Attack Impact Analysis of Electric Cyber Physical SystemsDocument6 pagesTowards A Framework For Cyber Attack Impact Analysis of Electric Cyber Physical SystemsLakshani AkalankaNo ratings yet
- Chaotic Multiplication Encryption Method For Security-Enhanced COOFDM-OQAM SystemsDocument4 pagesChaotic Multiplication Encryption Method For Security-Enhanced COOFDM-OQAM Systemskrishna reddyNo ratings yet
- Spoofing-Jamming Attack Strategy Using Optimal Power Distributions in Wireless Smart Grid NetworksDocument9 pagesSpoofing-Jamming Attack Strategy Using Optimal Power Distributions in Wireless Smart Grid NetworksBack UpNo ratings yet
- Fuzzy C-Means Clustering Based Secure Fusion Strategy in Collaborative Spectrum SensingDocument6 pagesFuzzy C-Means Clustering Based Secure Fusion Strategy in Collaborative Spectrum Sensingsuchi87No ratings yet
- Sum-Rate Maximization and Leakage Minimization For Multi-User Cell-Free Massive MIMO SystemsDocument17 pagesSum-Rate Maximization and Leakage Minimization For Multi-User Cell-Free Massive MIMO SystemsAlfredo TiMendzNo ratings yet
- Mes 038Document9 pagesMes 038MimiNo ratings yet
- Paper For Mind MapDocument12 pagesPaper For Mind MapAna RossoNo ratings yet
- GRC Manual of StyleDocument44 pagesGRC Manual of StyleRSA ArcherNo ratings yet
- Statistics For Business and EconomicsDocument19 pagesStatistics For Business and EconomicsSai MeenaNo ratings yet
- 7055 - Case Study - UK Power Station FINAL For WEBDocument2 pages7055 - Case Study - UK Power Station FINAL For WEBNyx RubyNo ratings yet
- Exhibitorlist Interz20 enDocument42 pagesExhibitorlist Interz20 enLindsay CatariNo ratings yet
- A Performance Management FrameworkDocument73 pagesA Performance Management Frameworkgh_sandruNo ratings yet
- Science and Technology and Nation BuildingDocument16 pagesScience and Technology and Nation BuildingJm BalessNo ratings yet
- Critically Discuss About Major Features of Water Resource Act, 2049 B.SDocument12 pagesCritically Discuss About Major Features of Water Resource Act, 2049 B.SPurple DreamNo ratings yet
- Laboratory Manual - Consolidation TestDocument3 pagesLaboratory Manual - Consolidation TestMarcos MorrisonNo ratings yet
- Dgms AvaDocument3 pagesDgms AvaVinod GuptaNo ratings yet
- Human Freedo M: Manuel B. Dy, JRDocument30 pagesHuman Freedo M: Manuel B. Dy, JRFRITZI MAE GAPUZNo ratings yet
- ADMN-2-002, Issue 01, Procedure For Personal Hygiene, Employee Facility and HousekeepingDocument4 pagesADMN-2-002, Issue 01, Procedure For Personal Hygiene, Employee Facility and HousekeepingSmsajid WaqasNo ratings yet
- Manufacturing Commercial Phosphate FertilizerDocument2 pagesManufacturing Commercial Phosphate FertilizerGhulam Mohy UddinNo ratings yet
- 1AC - Reagan MWDocument35 pages1AC - Reagan MWOrange JamNo ratings yet
- Quantum: PhysicsDocument11 pagesQuantum: PhysicsVinodNo ratings yet
- New - PDS Innova IGS 530 - 2017Document20 pagesNew - PDS Innova IGS 530 - 2017TRUONG HOANG DUCNo ratings yet
- Introduction To Industrial Laser Materials Processing (Rofin-Rinar Laser) (Z-Lib - Org) - 1Document143 pagesIntroduction To Industrial Laser Materials Processing (Rofin-Rinar Laser) (Z-Lib - Org) - 1bayou71usaNo ratings yet
- Wiring DM 1wDocument20 pagesWiring DM 1wAnan NasutionNo ratings yet
- ROBOTICS (MEB-465) : Quiz QuestionsDocument21 pagesROBOTICS (MEB-465) : Quiz QuestionsVishal Dhiman100% (2)
- Throwing Garbage in The SeaDocument3 pagesThrowing Garbage in The SeaZaramagne CaliboNo ratings yet
- Physics 2Document87 pagesPhysics 2Ranker's JourneyNo ratings yet
- Hydroelastic Analysis Procedure For ShipsDocument42 pagesHydroelastic Analysis Procedure For ShipsVictor DaggersNo ratings yet
- Declaration KitDocument4 pagesDeclaration KitJITANSHUCHAMPNo ratings yet
- Math Makes Sense Practice and Homework Book Grade 5 AnswersDocument8 pagesMath Makes Sense Practice and Homework Book Grade 5 Answerseh041zef100% (1)
- U6 CWDocument17 pagesU6 CWyoussef.hussein.se7sNo ratings yet
- Introducing Python Programming For Engineering Scholars: Zahid Hussain, Muhammad Siyab KhanDocument8 pagesIntroducing Python Programming For Engineering Scholars: Zahid Hussain, Muhammad Siyab KhanDavid C HouserNo ratings yet
- PSE PG Structure ModifedDocument61 pagesPSE PG Structure ModifedAnkit YadavNo ratings yet
- Development and Assessment of A Hand Assist DeviceDocument15 pagesDevelopment and Assessment of A Hand Assist DeviceAugusto Rodas VelezNo ratings yet