
You might also like
- Crankshaft Sensor CodeDocument28 pagesCrankshaft Sensor Codejvazquez50160% (5)
- Digital Hardware Design Assignment: Verilog Codes and SimulationsDocument16 pagesDigital Hardware Design Assignment: Verilog Codes and SimulationsTeja Krishna Kopuri100% (2)
- Computer Architecture Course: IT089IU International University - VNU HCM Date: March 2021 Dr. Le Hai Duong & Dr. Ly Tu Nga Time: 6 hours Trần Minh Duy ITITIU18230Document9 pagesComputer Architecture Course: IT089IU International University - VNU HCM Date: March 2021 Dr. Le Hai Duong & Dr. Ly Tu Nga Time: 6 hours Trần Minh Duy ITITIU18230Duy Tran MinhNo ratings yet
- VHDL Code For LCD DisplayDocument7 pagesVHDL Code For LCD DisplayPraveen VaishnavNo ratings yet
- LCD Interfacing with FPGA ProjectDocument12 pagesLCD Interfacing with FPGA ProjectKaranNo ratings yet
- f2114 Gprs Ip Modem Technical SpecificationDocument4 pagesf2114 Gprs Ip Modem Technical SpecificationmandyfourfaithNo ratings yet
- Test Bench For JK FlipDocument2 pagesTest Bench For JK Flipmnpaliwal020100% (2)
- MEDICINEDocument10 pagesMEDICINENATARAJANNo ratings yet
- Code Research Arduino - 1Document3 pagesCode Research Arduino - 1Dendrites StellarNo ratings yet
- Arduino Arpeggiator CodeDocument38 pagesArduino Arpeggiator CodeAdrianoEngelNo ratings yet
- Stopwatch ProjectDocument4 pagesStopwatch ProjectPPPPRIYANKNo ratings yet
- PidDocument7 pagesPidEmilio Arrieta GallardoNo ratings yet
- Tutorial Week 5 AnswersDocument8 pagesTutorial Week 5 Answerspotato moon berryNo ratings yet
- PIC32 motor control with encoder feedbackDocument5 pagesPIC32 motor control with encoder feedbackJhon PerezNo ratings yet
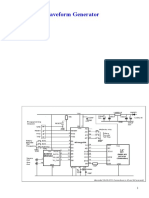
- AD9850 Waveform GeneratorDocument9 pagesAD9850 Waveform GeneratorDemixManNo ratings yet
- Assignment 1 ReportDocument19 pagesAssignment 1 ReportJyiou YimushiNo ratings yet
- PID Control MAX6675 Thermocouple Arduino Schematic With Rotary EncoderDocument13 pagesPID Control MAX6675 Thermocouple Arduino Schematic With Rotary EncoderStewin Perez100% (1)
- Timer 2Document29 pagesTimer 2Cesar Matos100% (2)
- 7 ps2Document16 pages7 ps2marcelinyNo ratings yet
- Tic Tac Toe VerilogDocument7 pagesTic Tac Toe VerilogAshish RaiNo ratings yet
- Project Documatation ReportDocument23 pagesProject Documatation ReportvisuNo ratings yet
- Sechtor300 Job AidDocument10 pagesSechtor300 Job AidGreg WilliamsNo ratings yet
- Manual of Diamond LCD Chess Game TimeDocument1 pageManual of Diamond LCD Chess Game TimeDamian Rosales100% (1)
- Lab 12Document6 pagesLab 12ThoughtsNo ratings yet
- Novo Documento de TextoDocument15 pagesNovo Documento de TextoJonatan Allan Oliveira SouzaNo ratings yet
- External Interrupt Switches Toggle LEDsDocument17 pagesExternal Interrupt Switches Toggle LEDsIragoudaNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - A - 16Document7 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - A - 16Tomás BurónNo ratings yet
- Quiz Buzzer Using 8051 ReportDocument9 pagesQuiz Buzzer Using 8051 ReportTes 2000100% (1)
- PC 5Document8 pagesPC 5Miguel RodasNo ratings yet
- Cheatsheet SuPDocument9 pagesCheatsheet SuPoana natarauNo ratings yet
- MSP430 Lab 1 Setup for 'printf' and Blinking LEDsDocument29 pagesMSP430 Lab 1 Setup for 'printf' and Blinking LEDsPhuc SJNo ratings yet
- DCF-77 LED Clock Microcontroller CodeDocument7 pagesDCF-77 LED Clock Microcontroller CodeIhsan LanaNo ratings yet
- lập trình vi xử lýDocument20 pageslập trình vi xử lýDoanh PhanNo ratings yet
- Lab 6 DSDDocument12 pagesLab 6 DSDRohaidNo ratings yet
- CodeDocument17 pagesCodeVishal Kottarathil73% (11)
- LCD Based Voting Machine Using 8051 Micro ControllerDocument9 pagesLCD Based Voting Machine Using 8051 Micro ControllerImtiaz Hussain100% (1)
- Prepare SNAP Data for PSI AnalysisDocument8 pagesPrepare SNAP Data for PSI AnalysisAngel M VásquezNo ratings yet
- Matlab Program Latihan Grafik dan Visualisasi 3DDocument13 pagesMatlab Program Latihan Grafik dan Visualisasi 3DAhmad Zaki Ramdani FaridNo ratings yet
- Timers and PWM on PIC MicrocontrollersDocument38 pagesTimers and PWM on PIC MicrocontrollersThanh LeNo ratings yet
- THÍ NGHIỆM VI ĐiỀU KHIỂN BÀI 3: Timer 2 and PWMDocument12 pagesTHÍ NGHIỆM VI ĐiỀU KHIỂN BÀI 3: Timer 2 and PWMNguyễn QuốcNo ratings yet
- F8GYRU8HY9Y0VCTDocument4 pagesF8GYRU8HY9Y0VCTSoheil AlizadehNo ratings yet
- TD2 Course Work P2646148Document31 pagesTD2 Course Work P2646148Thumula FernandoNo ratings yet
- Lab 5 - A VHDL Reaction TimerDocument10 pagesLab 5 - A VHDL Reaction TimerMayank AgarwalNo ratings yet
- CCS C compiler Access to PIC internal peripherals summaryDocument14 pagesCCS C compiler Access to PIC internal peripherals summaryEdmond LamNo ratings yet
- Arduino Robot Arm (TfCD): Build a Simple Robot Arm Using Arduino and CardboardDocument10 pagesArduino Robot Arm (TfCD): Build a Simple Robot Arm Using Arduino and CardboardNelson MendivelsoNo ratings yet
- Lab 11Document18 pagesLab 11ubaidNo ratings yet
- A86 Source Code Programmable Industrial On Off Timer With RF RemoteDocument2 pagesA86 Source Code Programmable Industrial On Off Timer With RF RemoteNguyen VuNo ratings yet
- GSM Based Home AutomationDocument80 pagesGSM Based Home AutomationShashi Kant SainiNo ratings yet
- Dsp programs for signal generation and ADC acquisitionDocument14 pagesDsp programs for signal generation and ADC acquisitionJaipaul CheernamNo ratings yet
- Vlsi Architecture Assignment-2 Name: Vithya M BITS ID: 2019HT01605Document11 pagesVlsi Architecture Assignment-2 Name: Vithya M BITS ID: 2019HT01605vithyaNo ratings yet
- Programmable Timing Functions Part 1: Timer-Generated InterruptsDocument25 pagesProgrammable Timing Functions Part 1: Timer-Generated InterruptsBui Van PhatNo ratings yet
- Microcontroller and Its Appl Ans (NEC 022-IiS)Document5 pagesMicrocontroller and Its Appl Ans (NEC 022-IiS)Sachin PalNo ratings yet
- 21L-5720 (Micro - Assignment 2)Document15 pages21L-5720 (Micro - Assignment 2)Muhammad Bin Osama Rana BSEE 2021 FAST NU LHRNo ratings yet
- Timing Requirements for Real-Time Embedded SystemsDocument31 pagesTiming Requirements for Real-Time Embedded SystemsEdson Pires da SilvaNo ratings yet
- Lab06 Sheet K02 Deb3013Document10 pagesLab06 Sheet K02 Deb3013Suhaimi ShahabNo ratings yet
- Rank Display SystemDocument45 pagesRank Display Systemsainisaurabh_1No ratings yet
- Macetes Do Curso MDDocument11 pagesMacetes Do Curso MDjoab britoNo ratings yet
- CodeDocument5 pagesCodeHuy NguyễnNo ratings yet
- List of Contacts - Rooms/flats For Rent: N. 4 TWO-ROOM APARTMENTS (One of Which Attic Floor) Consisting Of: 2Document2 pagesList of Contacts - Rooms/flats For Rent: N. 4 TWO-ROOM APARTMENTS (One of Which Attic Floor) Consisting Of: 2Ahmet CanNo ratings yet
- Ultimate Remet Paper 3000Document2 pagesUltimate Remet Paper 3000Ahmet CanNo ratings yet
- States Lab ReportDocument10 pagesStates Lab ReportAhmet CanNo ratings yet
- States Lab ReportDocument10 pagesStates Lab ReportAhmet CanNo ratings yet
- SeminarDocument14 pagesSeminarOmkar NathNo ratings yet
- Dataflow: Passing The TokenDocument42 pagesDataflow: Passing The TokenkbkkrNo ratings yet
- V Pos Installation GuideDocument49 pagesV Pos Installation GuideearlNo ratings yet
- DaVinci Resolve 15 Configuration GuideDocument55 pagesDaVinci Resolve 15 Configuration GuideitxNo ratings yet
- libra shutdown menu dialup shutdownDocument4 pageslibra shutdown menu dialup shutdownMehdi RahmatiNo ratings yet
- How To Use PrepKingDocument429 pagesHow To Use PrepKingYoppi LisyadiNo ratings yet
- BuiltIn Proactive Services ListDocument20 pagesBuiltIn Proactive Services ListArturo AdunaNo ratings yet
- M.2 SSD vs. SATA SSD? Which One Is The Best?Document3 pagesM.2 SSD vs. SATA SSD? Which One Is The Best?Sing PengNo ratings yet
- Multiux Ethical Wall Trial: Installation ProcedureDocument7 pagesMultiux Ethical Wall Trial: Installation ProcedureRoberto InfantasNo ratings yet
- h12204 VP For New VNX Series WPDocument45 pagesh12204 VP For New VNX Series WPMarouani AmorNo ratings yet
- SX3000sbc Maintenance GuideDocument15 pagesSX3000sbc Maintenance GuideRu AlexNo ratings yet
- Cisco UCS Platform Emulator User GuideDocument54 pagesCisco UCS Platform Emulator User Guidejohns1156No ratings yet
- Adorage ProtocolDocument17 pagesAdorage ProtocolBreakr TopNo ratings yet
- RACF5 Ichza6c1Document444 pagesRACF5 Ichza6c1Siranjeevi MohanarajaNo ratings yet
- Document Revision HistoryDocument174 pagesDocument Revision HistoryAfshinNo ratings yet
- Bud LogDocument5 pagesBud LogÀshør ATNo ratings yet
- Class VI - Computer Objective Questions.Document2 pagesClass VI - Computer Objective Questions.inaNo ratings yet
- CCNA 3 Student Lab Manual v5.0Document118 pagesCCNA 3 Student Lab Manual v5.0Nolton100% (3)
- Drop BoxDocument53 pagesDrop BoxEng. Mbuy Ngandu SandersNo ratings yet
- Windows 8 Vs Windows 8.1.Document44 pagesWindows 8 Vs Windows 8.1.cordial2No ratings yet
- Gateway GPRS Support Node (GGSN) - 4.0 AC-A09 - Gi ConfigurationDocument33 pagesGateway GPRS Support Node (GGSN) - 4.0 AC-A09 - Gi Configurationsling3100% (1)
- SAP HANA EIM Installation and Configuration Guide enDocument598 pagesSAP HANA EIM Installation and Configuration Guide enGabriele ZuccaroNo ratings yet
- IT Desktop Support JobDocument2 pagesIT Desktop Support JobSopan ZendeNo ratings yet
- Lec 01Document18 pagesLec 01Subhadip Das SarmaNo ratings yet
- Debug 1214Document3 pagesDebug 1214Ajeng TaliaNo ratings yet
- Difference Between Mac and IpDocument3 pagesDifference Between Mac and IpkavitaNo ratings yet
- Computer Components: Top Level ViewDocument52 pagesComputer Components: Top Level ViewAgus NugrohoNo ratings yet
- InfoPLC Net 77430539 Wincc Migrationguide DOC V21 enDocument24 pagesInfoPLC Net 77430539 Wincc Migrationguide DOC V21 ensaaintNo ratings yet
- Apple Accessory ProtocolDocument9 pagesApple Accessory ProtocolGino MarchalNo ratings yet



























































![Catalan's Constant [Ramanujan's Formula]](https://imgv2-2-f.scribdassets.com/img/word_document/184328509/149x198/de35e6e4eb/1579705405?v=1)































