You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Ball Balancing RobotDocument67 pagesBall Balancing RobotdorivolosNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- DPS6 IntroDocument35 pagesDPS6 Introossoski100% (7)
- Physical Science 2.2Document36 pagesPhysical Science 2.2Mark A. IgnacioNo ratings yet
- Mechanical Engineering PDFDocument153 pagesMechanical Engineering PDFkylealamangoNo ratings yet
- Superb Academy: Test # 7.1 PhysicsDocument4 pagesSuperb Academy: Test # 7.1 PhysicsKamran Ali100% (2)
- Kinematics For Multisection Continuum Robots: Bryan A. Jones, Member, IEEE and Ian D. Walker, Fellow, IEEEDocument15 pagesKinematics For Multisection Continuum Robots: Bryan A. Jones, Member, IEEE and Ian D. Walker, Fellow, IEEESamuel Esteban Rodriguez LopezNo ratings yet
- DOM TechMaxDocument529 pagesDOM TechMaxSwaraj KhandekarNo ratings yet
- Rob M5 Ktunotes - inDocument30 pagesRob M5 Ktunotes - inMUHAMMED RISWANNo ratings yet
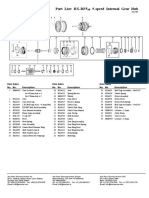
- Part List: RX-RF5 5-Speed Internal Gear HubDocument2 pagesPart List: RX-RF5 5-Speed Internal Gear HubTomislav KoprekNo ratings yet
- Design and Synthesis of Eight-Legged Spider RobotDocument11 pagesDesign and Synthesis of Eight-Legged Spider RobotIJRASETPublicationsNo ratings yet
- Meriam Kinematic Particles Dynamics 1Document26 pagesMeriam Kinematic Particles Dynamics 1antoniofortese50% (2)
- 0 JVQwu YOlv TM6 Iz Ds 2 Q GDocument60 pages0 JVQwu YOlv TM6 Iz Ds 2 Q GdhanukrishnagNo ratings yet
- Cat. Gral MercomarveDocument43 pagesCat. Gral Mercomarvewillys8No ratings yet
- US4458549Document8 pagesUS4458549Chandru VelNo ratings yet
- Baze University Abuja: MTH 103:geometry Part Iii: DynamicsDocument58 pagesBaze University Abuja: MTH 103:geometry Part Iii: DynamicsNabil-babayo WANKANo ratings yet
- Kinematics of MachinesDocument227 pagesKinematics of Machinesborchec100% (2)
- Chapter3 GovernorDocument16 pagesChapter3 GovernorBazli Faiq Zaini100% (1)
- Ece2008 Robotics-And-Automation Eth 2.0 40 Ece2008Document2 pagesEce2008 Robotics-And-Automation Eth 2.0 40 Ece2008Raj GaneshNo ratings yet
- Links and Joints: Kinematic PairsDocument4 pagesLinks and Joints: Kinematic PairsAhmed AdelNo ratings yet
- (1.28) Learning PHYSICS - XI Exercise 4.2aDocument8 pages(1.28) Learning PHYSICS - XI Exercise 4.2akartik lakraNo ratings yet
- Lecture 2 Motion in Two or Three DimensionsDocument26 pagesLecture 2 Motion in Two or Three Dimensionsa5759761No ratings yet
- Work Power EnergyDocument21 pagesWork Power EnergykishansaiNo ratings yet
- Energy - Forces QuizDocument1 pageEnergy - Forces Quizapi-368213959No ratings yet
- Kinematics in One DimensionDocument31 pagesKinematics in One DimensionShipsGonnaSailNo ratings yet
- Module Mechanics of Machines BMCM 2723 - Rev BDocument175 pagesModule Mechanics of Machines BMCM 2723 - Rev Bshazwani zamriNo ratings yet
- Dynamics 2 - Dynamics and Kinematics - NotesDocument10 pagesDynamics 2 - Dynamics and Kinematics - NoteswelcometotheswampNo ratings yet
- Different Kinds of MechanismsDocument31 pagesDifferent Kinds of Mechanismslockenload92% (13)
- Physics 9th Edition Cutnell Solutions ManualDocument25 pagesPhysics 9th Edition Cutnell Solutions ManualCathyWileybptyr100% (42)
- Bevel Gear PDFDocument7 pagesBevel Gear PDFubaldo caraballo100% (1)
- Cambridge Step SyllabusDocument52 pagesCambridge Step SyllabuststeatteszNo ratings yet