You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- ECA Task Force CCS Guideline Vers2Document53 pagesECA Task Force CCS Guideline Vers2elisabetta ghilardi100% (2)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Strategic Cost Management CabreraDocument5 pagesStrategic Cost Management CabreraJyrah Mae Aceron0% (1)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Catalog PDFDocument47 pagesCatalog PDFitounos100% (4)
- L293D Motor Control Shield: FeaturesDocument6 pagesL293D Motor Control Shield: FeaturesJefferson HenriqueNo ratings yet
- MRP BajajDocument352 pagesMRP BajajRanesh Kumar0% (1)
- Audit of ReceivableDocument14 pagesAudit of ReceivableMr.AccntngNo ratings yet
- MED 6PRMrtNGYrePPaIRVzBiHMnSZ852QCmf5Ft5NrVmoSb23fVx102xbWkZNQsL OriginalDocument24 pagesMED 6PRMrtNGYrePPaIRVzBiHMnSZ852QCmf5Ft5NrVmoSb23fVx102xbWkZNQsL Originalpps g69No ratings yet
- Module 1 2nd Quarter d11Document5 pagesModule 1 2nd Quarter d11Abbie RañosaNo ratings yet
- RTC ShockDocument16 pagesRTC ShockMarcelNo ratings yet
- EE5518 VLSI Digital Circuit Design VLSI Digital Circuit DesignDocument39 pagesEE5518 VLSI Digital Circuit Design VLSI Digital Circuit DesignBharat Kumar100% (1)
- Heart Disease and Stroke BrochureDocument3 pagesHeart Disease and Stroke Brochureapi-461951012No ratings yet
- Mead's Theory of The SelfDocument1 pageMead's Theory of The Selfsumayya tariqNo ratings yet
- UNIT 5 Notes - OoadDocument33 pagesUNIT 5 Notes - OoadMALARMANNAN ANo ratings yet
- Fishing in The Roman WorldDocument69 pagesFishing in The Roman Worldmnm06100% (1)
- Diesel Engine 6R 1000/om 936: IndustrialDocument2 pagesDiesel Engine 6R 1000/om 936: IndustrialAdrian NNo ratings yet
- Paper Airplane PhysicsDocument16 pagesPaper Airplane Physicsapi-296709346No ratings yet
- Fis Module 5Document13 pagesFis Module 5roxan clabriaNo ratings yet
- WPSASMEDocument76 pagesWPSASMERama TamaNo ratings yet
- Mauser 98K - Model 48 Rifle ManualDocument20 pagesMauser 98K - Model 48 Rifle ManualMeor Amri96% (28)
- Sven Hoeger Case Study Habirshaw ParkDocument11 pagesSven Hoeger Case Study Habirshaw ParkRoberthothanNo ratings yet
- Lexicology Week 6 2023Document6 pagesLexicology Week 6 2023Gvanca GrdzelishviliNo ratings yet
- Bethel Tatenda CVDocument6 pagesBethel Tatenda CVEmmanuel M. ChiwaNo ratings yet
- Speech As A Signal of Social IdentityDocument25 pagesSpeech As A Signal of Social IdentityAysha BahaaNo ratings yet
- Comparative Analysis Between Lime and Cement Mortar in Traditional BuildingsDocument44 pagesComparative Analysis Between Lime and Cement Mortar in Traditional BuildingsGAURAV mISHRANo ratings yet
- 2022 02 Versione DigitaleDocument224 pages2022 02 Versione DigitaleErnesti SanchezNo ratings yet
- Tourism Essay FinalDocument6 pagesTourism Essay FinalNiyatee ManjureNo ratings yet
- Technical Pens and Its UsesDocument6 pagesTechnical Pens and Its UsesBridget Nicole BordeosNo ratings yet
- Ac SequenceDocument4 pagesAc SequencejenolivaNo ratings yet
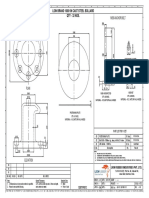
- M56 Anchor Bolt: Lion Brand 1000 KN Cast Steel Bollard Qty - 32 NosDocument1 pageM56 Anchor Bolt: Lion Brand 1000 KN Cast Steel Bollard Qty - 32 NossanaNo ratings yet
- Suppurative Lung Diseases.Document37 pagesSuppurative Lung Diseases.Salman KhanNo ratings yet