You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5811)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Memorial Descritivo Simplificado Grupos Ae BDocument3 pagesMemorial Descritivo Simplificado Grupos Ae BGeorgito de Sá SantosNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
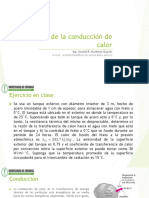
- Conducción de Calor Por Conducción 1D en TransitorioDocument47 pagesConducción de Calor Por Conducción 1D en TransitorioLinda Lorena Diaz ReyesNo ratings yet
- Electromagnetismo A1Document18 pagesElectromagnetismo A1mauriciocNo ratings yet
- Electromagnetismo A1Document18 pagesElectromagnetismo A1mauriciocNo ratings yet
- NTC 2288 Medidores Electromecánicos de Energía Activa Clase 0,5 1 y 2Document19 pagesNTC 2288 Medidores Electromecánicos de Energía Activa Clase 0,5 1 y 2mauricioc0% (1)
- Sistemas de Comunicacones-Suárez Vargas.F. C. 2020. Pag-281-309Document30 pagesSistemas de Comunicacones-Suárez Vargas.F. C. 2020. Pag-281-309mauriciocNo ratings yet
- Https Repositorio - Uniandes.edu - Co.ruidoDocument49 pagesHttps Repositorio - Uniandes.edu - Co.ruidomauriciocNo ratings yet
- Sistemas de Comunicaciones - RuidoDocument25 pagesSistemas de Comunicaciones - RuidomauriciocNo ratings yet
- Redes de Comunicación Industrial - Todo Lo Que Necesitas SaberDocument12 pagesRedes de Comunicación Industrial - Todo Lo Que Necesitas SabermauriciocNo ratings yet
- Minitransmisor de FMDocument7 pagesMinitransmisor de FMmauriciocNo ratings yet
- Bateman, A. (2003) - Comunicaciones Digitales.41-160Document94 pagesBateman, A. (2003) - Comunicaciones Digitales.41-160mauriciocNo ratings yet
- Redalyc - Reflexiones Bioéticas Acerca de La Enseñanza de La Medicina en Simuladores ElectrónicosDocument28 pagesRedalyc - Reflexiones Bioéticas Acerca de La Enseñanza de La Medicina en Simuladores ElectrónicosmauriciocNo ratings yet
- 100413a 951 G56 T1 Rodolfo - CardozoDocument23 pages100413a 951 G56 T1 Rodolfo - CardozomauriciocNo ratings yet
- Tarea 3 - CompletaDocument10 pagesTarea 3 - CompletamauriciocNo ratings yet
- Fase 4 - Grupo 41 - PrototipoDocument24 pagesFase 4 - Grupo 41 - PrototipomauriciocNo ratings yet
- Fase 3 - Grupo 41 - Avance ProyectoDocument21 pagesFase 3 - Grupo 41 - Avance ProyectomauriciocNo ratings yet
- NTC 4340 Símbolos para Medidores de Energía de Corriente AlternaDocument20 pagesNTC 4340 Símbolos para Medidores de Energía de Corriente AlternamauriciocNo ratings yet
- NTC 2147 Medidores Estáticos de Energía Activa Clase 0,2s y 0,5sDocument20 pagesNTC 2147 Medidores Estáticos de Energía Activa Clase 0,2s y 0,5smauriciocNo ratings yet
- Capacitación NTC 4856-2018Document18 pagesCapacitación NTC 4856-2018mauriciocNo ratings yet
- NTC 4052 Medidores Estáticos de Energía Activa Clase 1 y 2Document24 pagesNTC 4052 Medidores Estáticos de Energía Activa Clase 1 y 2mauricioc100% (1)
- NTC - 2149-2 Equipos de Medicion de Energia Electrica. Inspeccion de Aceptacion PDFDocument20 pagesNTC - 2149-2 Equipos de Medicion de Energia Electrica. Inspeccion de Aceptacion PDFmauriciocNo ratings yet
- Calculo DerivaDocument35 pagesCalculo DerivamauriciocNo ratings yet
- Norma NTC 4856 2018-10-17 PDFDocument43 pagesNorma NTC 4856 2018-10-17 PDFmauriciocNo ratings yet
- II Teorema de Castigliano en Cerchas.Document5 pagesII Teorema de Castigliano en Cerchas.MarleRojasMedinaNo ratings yet
- Análisis Capitulo 26 LigieDocument2 pagesAnálisis Capitulo 26 Ligie5421100112No ratings yet
- Phys June 2010 P1 PDFDocument12 pagesPhys June 2010 P1 PDFgariel lewisNo ratings yet
- Grade 9, Quarter 4Document52 pagesGrade 9, Quarter 4jayson albarracinNo ratings yet
- HondasDocument1 pageHondasIsabel Cristina López tunNo ratings yet
- 1.02.E.DT42S Thermodynamic Steam Traps DN15-25Document2 pages1.02.E.DT42S Thermodynamic Steam Traps DN15-25Son Trinh PhuongNo ratings yet
- Biologia Tarea 3 - Tania GrossoDocument20 pagesBiologia Tarea 3 - Tania GrossoTania GrossoNo ratings yet
- Presi On en Un L Iquido: Laboratorio 2Document4 pagesPresi On en Un L Iquido: Laboratorio 2Diego Herrera PinoNo ratings yet
- The Tower Shadow Effect in Downwind Wind Turbines: Marit ReisoDocument154 pagesThe Tower Shadow Effect in Downwind Wind Turbines: Marit ReisoCarlos Vitor Silva SarmentoNo ratings yet
- @structural Steel Design - A Practice Oriented ApproachDocument9 pages@structural Steel Design - A Practice Oriented ApproachFRANCISCO CUBA H.No ratings yet
- Performance Examination - SoilsDocument3 pagesPerformance Examination - SoilsNazmul Islam RafiNo ratings yet
- Civ. CalculationsDocument4 pagesCiv. Calculationsavkl007No ratings yet
- Rotational Equilibrium and Rotational DynamicsDocument3 pagesRotational Equilibrium and Rotational DynamicsAnn Margarette MoralesNo ratings yet
- Intrusión de AguaDocument7 pagesIntrusión de AguaDaniel Camilo BustosNo ratings yet
- HN10 / HN12 / HN15: Owner'S ManualDocument4 pagesHN10 / HN12 / HN15: Owner'S Manualchristopher ng'ang'a kamauNo ratings yet
- Diseño Vial PDFDocument333 pagesDiseño Vial PDFJASON LUIS VILLALOBOS PINEDANo ratings yet
- Vista® Manual UDS - Distribución Aérea (15.5 KV A 38 KV) - EspecificacionesDocument29 pagesVista® Manual UDS - Distribución Aérea (15.5 KV A 38 KV) - EspecificacionesAngel acevedoNo ratings yet
- Reversible Reactions and Equilibria MSDocument13 pagesReversible Reactions and Equilibria MSzarsoeNo ratings yet
- Ficha ENLACES IÓNICOS - Tercer AñoDocument2 pagesFicha ENLACES IÓNICOS - Tercer AñoWalter Ruiz GraosNo ratings yet
- Lg355n1c-A6 AusDocument2 pagesLg355n1c-A6 AusvijayNo ratings yet
- DevconDocument48 pagesDevconM Ferry AnwarNo ratings yet
- Emtl Ii Ii R20Document2 pagesEmtl Ii Ii R20InstagramNo ratings yet
- Mapa Mental E.IDocument1 pageMapa Mental E.Ilitman cubas terronesNo ratings yet
- De Las Matrices A D NDocument10 pagesDe Las Matrices A D NJuan Camilo CaNo ratings yet
- API 3 - Conocimiento de MaterialesDocument3 pagesAPI 3 - Conocimiento de MaterialesRodrigo CarranzaNo ratings yet
- TP 6 1 Et 6-2 Essai de TractionDocument3 pagesTP 6 1 Et 6-2 Essai de TractionhamidNo ratings yet
- FD 2020 410505 00Document2 pagesFD 2020 410505 00rabia akramNo ratings yet