You might also like
- Programming Arduino Projects with the PIC Microcontroller: A Line-by-Line Code Analysis and Complete Reference Guide for Embedded Programming in CFrom EverandProgramming Arduino Projects with the PIC Microcontroller: A Line-by-Line Code Analysis and Complete Reference Guide for Embedded Programming in CNo ratings yet
- Rplidar: Development Kit User ManualDocument15 pagesRplidar: Development Kit User ManualVõ Quốc HuyNo ratings yet
- Rplidar: Development Kit User ManualDocument15 pagesRplidar: Development Kit User ManualZaki YuandaNo ratings yet
- Rplidar: Development Kit User ManualDocument15 pagesRplidar: Development Kit User ManualGhj100% (1)
- RAK3172-SiP Module Quick Start Guide RAKwireless Documentation CenterDocument160 pagesRAK3172-SiP Module Quick Start Guide RAKwireless Documentation Centermarcelu.phdNo ratings yet
- YDLIDAR X4 Lidar User Manual V1.3 (211230)Document15 pagesYDLIDAR X4 Lidar User Manual V1.3 (211230)dbu746462945No ratings yet
- YDLIDAR X2 Lidar User Manual V1.3Document16 pagesYDLIDAR X2 Lidar User Manual V1.3Prospeccion GeofisicaNo ratings yet
- Programacion IcspDocument8 pagesProgramacion IcspGerardo Madrigal100% (2)
- Cara Kerja Robot Arduino DuinopeakDocument4 pagesCara Kerja Robot Arduino DuinopeakDražen BorčićNo ratings yet
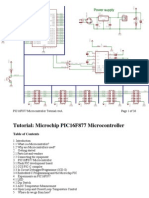
- PIC16F877 Microcontroller TutorialDocument37 pagesPIC16F877 Microcontroller Tutorialmc_prayer100% (4)
- QL200 User A4 enDocument41 pagesQL200 User A4 enmcnaomhNo ratings yet
- RPLDAPPN01-rplidar Appnote arduinolib-enUSDocument12 pagesRPLDAPPN01-rplidar Appnote arduinolib-enUSReyhanNo ratings yet
- Full Flow RAK - RTL To Place & Route, Including ECO: Rapid Adoption Kit (RAK)Document39 pagesFull Flow RAK - RTL To Place & Route, Including ECO: Rapid Adoption Kit (RAK)dupipiNo ratings yet
- Quick Start Guide - RAKwireless Documentation Center PDFDocument39 pagesQuick Start Guide - RAKwireless Documentation Center PDFConrad ReyesNo ratings yet
- Landtiger v2.0 - Manual v1.1 PDFDocument55 pagesLandtiger v2.0 - Manual v1.1 PDFAnil SuhaNo ratings yet
- QL200 Manual y Esquematicos Del EntrenadorDocument41 pagesQL200 Manual y Esquematicos Del Entrenador9io100% (1)
- Boot Loader Enable PIC Micro ControllersDocument8 pagesBoot Loader Enable PIC Micro Controllersjoeccorrrea100% (2)
- DCON v2.02Document25 pagesDCON v2.02Hareem FatimaNo ratings yet
- FANUC's Standard SCA Sealing Programming (Version4.0)Document20 pagesFANUC's Standard SCA Sealing Programming (Version4.0)Leinad OicaloNo ratings yet
- Pan-Tilt HAT User Manual enDocument17 pagesPan-Tilt HAT User Manual enPhạm TuấnNo ratings yet
- Project Report 2Document57 pagesProject Report 2brijpatel909No ratings yet
- Pic Programer RCDDocument8 pagesPic Programer RCDvikixxxNo ratings yet
- Dbaudiotechnik R1 ManualDocument41 pagesDbaudiotechnik R1 ManualHugo CarrilNo ratings yet
- QL Prog - ManualDocument25 pagesQL Prog - ManualOscar GarnicaNo ratings yet
- TI CCdebugger05 User MannualDocument20 pagesTI CCdebugger05 User MannualDamianNo ratings yet
- Programming Device Manual Booklet: AVR Prog USB v2, STK500 v2Document17 pagesProgramming Device Manual Booklet: AVR Prog USB v2, STK500 v2emanueldanielNo ratings yet
- Useri2c v3-1Document11 pagesUseri2c v3-1Devan AntonyNo ratings yet
- Build a Serial Port PIC Programmer for under 40 charactersDocument6 pagesBuild a Serial Port PIC Programmer for under 40 charactersUmair IslamNo ratings yet
- Virtual Reality Robot with 3D Vision Provides Immersive Remote ExperienceDocument13 pagesVirtual Reality Robot with 3D Vision Provides Immersive Remote ExperienceROHAN MUKESH SUMESARANo ratings yet
- In-Circuit Serial Programming - Picmicro Mid-Range Mcu Family PDFDocument14 pagesIn-Circuit Serial Programming - Picmicro Mid-Range Mcu Family PDFMauro Vargas100% (2)
- Connecting Compax3 I22T11 and Allen Bradley / Rockwell Plcs Via DevicenetDocument27 pagesConnecting Compax3 I22T11 and Allen Bradley / Rockwell Plcs Via DevicenetIngeniería 2 ICMANo ratings yet
- Mcs9865 Linux Um Ver1.1Document8 pagesMcs9865 Linux Um Ver1.1oscare2No ratings yet
- Atmega 32 InterfacingDocument34 pagesAtmega 32 InterfacingvineethrajanNo ratings yet
- Loading PIC16F84A using different ProgrammersDocument12 pagesLoading PIC16F84A using different ProgrammersKiel BancilNo ratings yet
- Eedt6usermanual PDFDocument36 pagesEedt6usermanual PDFhafiz arslanNo ratings yet
- Arduino Board ManualDocument19 pagesArduino Board ManualGaurav Handa100% (1)
- Pop Bot Lite - Manual PDFDocument100 pagesPop Bot Lite - Manual PDFMinarto AsmaratmoNo ratings yet
- Pci 1711Document60 pagesPci 1711JCNo ratings yet
- Robosapiens Atmega-8 Mini (Version B-695) Board For Robotics & Embedded ApplicationDocument11 pagesRobosapiens Atmega-8 Mini (Version B-695) Board For Robotics & Embedded ApplicationSumit agarwalNo ratings yet
- Sk40c Pic 16f877a Crash CourseDocument24 pagesSk40c Pic 16f877a Crash Coursezulko100% (3)
- Open429Z D UserManualDocument11 pagesOpen429Z D UserManualBleuffie ChestyNo ratings yet
- Mikroprog Pic Manual v200Document44 pagesMikroprog Pic Manual v200kica62100% (1)
- 7000 108-048, E, R4 Display SW Update InstructionDocument11 pages7000 108-048, E, R4 Display SW Update InstructionpalNo ratings yet
- ROHR2 FeaturelistDocument27 pagesROHR2 FeaturelistTalpes AlexandruNo ratings yet
- Elesof: Dc-MotorDocument44 pagesElesof: Dc-Motorabhay2703100% (3)
- Pic ManualDocument30 pagesPic Manualgg.ganapathy100% (2)
- Getting Started Guide: No Coding, No Limits..Document8 pagesGetting Started Guide: No Coding, No Limits..jchpipoasNo ratings yet
- Ancortek Manual V1.0 20150601Document21 pagesAncortek Manual V1.0 20150601Wesley GeorgeNo ratings yet
- Smajayu User GuideDocument56 pagesSmajayu User GuideArmando MillsNo ratings yet
- Success Creathjs KKHDSDDocument4 pagesSuccess Creathjs KKHDSDXxvic2rxXNo ratings yet
- InduSoft SolutionDocument103 pagesInduSoft SolutionMikael PaivaNo ratings yet
- RF Prog Guideline SapnetDocument33 pagesRF Prog Guideline SapnetJohn NederpelNo ratings yet
- Docklight Application Note ArduinoSerialDocument7 pagesDocklight Application Note ArduinoSerialJoslin MutomboNo ratings yet
- Read MeDocument7 pagesRead MeMagdalena BujaraNo ratings yet
- Application Notes BDL3245E/BDL4245E/BDL4645E: Remote Control Protocol For RJ-45 InterfaceDocument16 pagesApplication Notes BDL3245E/BDL4245E/BDL4645E: Remote Control Protocol For RJ-45 Interfacezebigbos22No ratings yet
- OMAP-L138/C6748 Low-Cost Development Kit (LCDK) : User's GuideDocument15 pagesOMAP-L138/C6748 Low-Cost Development Kit (LCDK) : User's Guideparsu2kNo ratings yet
- Emr 5 ConDocument15 pagesEmr 5 ConAlrich BalanayNo ratings yet
- Construir RobotDocument54 pagesConstruir RobotCarlos Ruiz LopezNo ratings yet
- Mbed BK Ed2 CH 2Document10 pagesMbed BK Ed2 CH 2book likeNo ratings yet
- 8) SRP Well Report Generator 014 PDFDocument21 pages8) SRP Well Report Generator 014 PDFjuanc964No ratings yet
- Linguistic Manipulation: Definition and TypesDocument4 pagesLinguistic Manipulation: Definition and TypeslazarstosicNo ratings yet
- Vivado HLSDocument110 pagesVivado HLSPeter LiNo ratings yet
- Final Exam Timetable and Portion - STD 5Document4 pagesFinal Exam Timetable and Portion - STD 5suvarna deshmukhNo ratings yet
- Present Tense Verb PracticeDocument3 pagesPresent Tense Verb PracticeDeicy Zulena Ballen CastroNo ratings yet
- A Woman in Her PrimeDocument2 pagesA Woman in Her PrimeFola AdedejiNo ratings yet
- 1st QTR MATH Week 4-6Document24 pages1st QTR MATH Week 4-6Eunice JorgeNo ratings yet
- Sermon Series On The Book of Acts Part 2Document4 pagesSermon Series On The Book of Acts Part 2L.A. CruzNo ratings yet
- Reflective Lesson PlanDocument6 pagesReflective Lesson PlanstraitmiNo ratings yet
- AspectDocument11 pagesAspectSaiful HudaNo ratings yet
- AP Caesar SyllabusDocument5 pagesAP Caesar SyllabusWilliam Eric Oates100% (1)
- Lab 1Document12 pagesLab 1quyên nguyễnNo ratings yet
- Python AnswersDocument33 pagesPython AnswersSHUBHAN SNo ratings yet
- 2,000 Most Common Norwegian WordsDocument56 pages2,000 Most Common Norwegian WordsIsmael LaaboudiNo ratings yet
- BMC Remedy IT Service Management 7.0 IntegrationsDocument92 pagesBMC Remedy IT Service Management 7.0 IntegrationsFabioNo ratings yet
- SPEECH AND THEATER Communication UniversalsDocument3 pagesSPEECH AND THEATER Communication UniversalsMa'am Roma GualbertoNo ratings yet
- Praktikum Basis Data 1Document4 pagesPraktikum Basis Data 1sengHansunNo ratings yet
- Binder 1Document305 pagesBinder 1Md Ridwanul Haque ZawadNo ratings yet
- Summary of The Finite Amplitude Wave TheoryDocument2 pagesSummary of The Finite Amplitude Wave TheoryTheeva Raj100% (1)
- Introduction to Microsoft Azure CloudDocument108 pagesIntroduction to Microsoft Azure CloudVipin NarangNo ratings yet
- 5G Core Network Product InformationDocument49 pages5G Core Network Product InformationIPLOOK TechnologiesNo ratings yet
- Alexander Theroux Answers Charge of Plagiarism in Primary Colors - San Diego ReaderDocument21 pagesAlexander Theroux Answers Charge of Plagiarism in Primary Colors - San Diego ReaderPahomy4100% (1)
- The Knights Tale by Geoffrey ChaucerDocument2 pagesThe Knights Tale by Geoffrey Chaucerapi-222876920No ratings yet
- 80286Document74 pages80286Arannya MonzurNo ratings yet
- 5 de Thi Giua Hoc Ki 2 Tieng Anh 5 Moi Co Dap An Va Loi Giai Chi Tiet 1673601852Document51 pages5 de Thi Giua Hoc Ki 2 Tieng Anh 5 Moi Co Dap An Va Loi Giai Chi Tiet 1673601852annievo100796No ratings yet
- Learn Mandarin Chinese - Filler WordsDocument8 pagesLearn Mandarin Chinese - Filler Wordsgeroniml100% (2)
- Rules For Rounding Off Numerical Values: Indian StandardDocument10 pagesRules For Rounding Off Numerical Values: Indian StandardVelchuri SairamNo ratings yet
- Arun Kolatkar's Jejuri poems explore alienation and perceptionDocument12 pagesArun Kolatkar's Jejuri poems explore alienation and perceptionSaurabh Wadhwa100% (1)
- Harmonic Analysis (1910)Document174 pagesHarmonic Analysis (1910)Magdy Hemeda100% (2)
- FEFLOW - Modelling Unsaturated-Flow and Infiltration Processes (27 Oct, Webinar)Document29 pagesFEFLOW - Modelling Unsaturated-Flow and Infiltration Processes (27 Oct, Webinar)Carolina SayagoNo ratings yet
- HarikambhojiDocument8 pagesHarikambhojiDasika SunderNo ratings yet