You might also like
- Control Systems LAB # 8 Design Via Root Locus: Example: Find The Root Locus For The T.F Matlab CodeDocument6 pagesControl Systems LAB # 8 Design Via Root Locus: Example: Find The Root Locus For The T.F Matlab CodeiyerrohitNo ratings yet
- Tutorial III Root Locus DesignDocument25 pagesTutorial III Root Locus Designapi-3856083100% (3)
- Signals and Systems Laboratory 7Document9 pagesSignals and Systems Laboratory 7Kthiha CnNo ratings yet
- Lab Experiment # 07: Demonstrate Roots Locus Analysis Matlab/Simulink ObjectiveDocument8 pagesLab Experiment # 07: Demonstrate Roots Locus Analysis Matlab/Simulink ObjectiveMuhammad Samee baigNo ratings yet
- Lab 2 - Root Locus Analysis (202312)Document2 pagesLab 2 - Root Locus Analysis (202312)Azlina RamliNo ratings yet
- ControlDocument55 pagesControlHuyThaiNo ratings yet
- Tutorial III Root Locus DesignDocument25 pagesTutorial III Root Locus DesignNur DalilaNo ratings yet
- G(S) K S (s+10) K S (s+0.5) (SDocument3 pagesG(S) K S (s+10) K S (s+0.5) (SSHEKHARNo ratings yet
- CS Mid 2Document3 pagesCS Mid 2SHEKHARNo ratings yet
- Space Simulation Lab ManualDocument55 pagesSpace Simulation Lab ManualBhanuNo ratings yet
- Control-Systems Lab (080-096)Document17 pagesControl-Systems Lab (080-096)Gangula Praneeth ReddyNo ratings yet
- FCS Lab2Document36 pagesFCS Lab2muhammadNo ratings yet
- Control Exp 8 Student ManualDocument7 pagesControl Exp 8 Student ManualSyed Nahid Ahmed TopuNo ratings yet
- Objective: R (S) K G (S) Y (S)Document6 pagesObjective: R (S) K G (S) Y (S)Mujtaba HusseinNo ratings yet
- Plotting of Bode Plots, Root Locus and Nyquist PlotsDocument6 pagesPlotting of Bode Plots, Root Locus and Nyquist PlotsPuduru BharathiNo ratings yet
- 5.2 Root-Locus TechniqueDocument3 pages5.2 Root-Locus Techniquevikash yadavNo ratings yet
- EE303 Linear Control Systems, May 2019Document3 pagesEE303 Linear Control Systems, May 2019Annjo JacksonNo ratings yet
- Lab # 7 Control SystemDocument15 pagesLab # 7 Control SystemZabeehullahmiakhailNo ratings yet
- Laboratory 9 - Laplace TransformDocument11 pagesLaboratory 9 - Laplace TransformOsama AlqahtaniNo ratings yet
- Practice #3: Sys ZPK (Z, P, K)Document5 pagesPractice #3: Sys ZPK (Z, P, K)Kaneki kenNo ratings yet
- Tutorial 8 - Stability and The S' Plane: © D.J.Dunn 1Document0 pagesTutorial 8 - Stability and The S' Plane: © D.J.Dunn 1Karthi KeyanNo ratings yet
- Objective: Theory:: Indian Institute of Information Technology, Design & Manufacturing, Jabalpur (M.P.)Document6 pagesObjective: Theory:: Indian Institute of Information Technology, Design & Manufacturing, Jabalpur (M.P.)MANOJ KUMAR DASNo ratings yet
- Complete Root LocusDocument15 pagesComplete Root LocusZagrebas EightpackNo ratings yet
- A Tutorial For Electronic Circuit ...Document5 pagesA Tutorial For Electronic Circuit ...Chito June TumolvaNo ratings yet
- 1 Lab Manual-Final-Control-System-1Document35 pages1 Lab Manual-Final-Control-System-1Shimalis RetaNo ratings yet
- 3.ROOT LOCUS Technique - Ruhizan Edit Oct2020Document42 pages3.ROOT LOCUS Technique - Ruhizan Edit Oct2020MOHD ENDRA SHAFIQNo ratings yet
- AE157 Spring2015 HW 01Document3 pagesAE157 Spring2015 HW 01reiner satrioNo ratings yet
- Lag Comp Ensator Design Using Root: Ob JectivesDocument8 pagesLag Comp Ensator Design Using Root: Ob JectivesProf HaryNo ratings yet
- Root Locus Diagram - GATE Study Material in PDFDocument7 pagesRoot Locus Diagram - GATE Study Material in PDFAtul Choudhary100% (1)
- Parameter For Dynalnic System Performance: "Ari TionDocument8 pagesParameter For Dynalnic System Performance: "Ari TionPriyanshu KumawatNo ratings yet
- LR 4Document16 pagesLR 4raja badarNo ratings yet
- Sanchez 07 Poles and Zeros of Transfer FunctionsDocument20 pagesSanchez 07 Poles and Zeros of Transfer FunctionsYasmin KayeNo ratings yet
- Fpaa ImplementationDocument11 pagesFpaa ImplementationIshikasedrfNo ratings yet
- Lab 9Document3 pagesLab 9Medo SaeediNo ratings yet
- CS EC Paper End Sem BPDocument1 pageCS EC Paper End Sem BPPRASANTA ROYNo ratings yet
- ELEN90055 Control Systems: Midsemester TestDocument2 pagesELEN90055 Control Systems: Midsemester TestMingyue WangNo ratings yet
- Note 8 Root-Locus TechniquesDocument10 pagesNote 8 Root-Locus TechniquesΙωάννης Γεωργίου ΜάντηςNo ratings yet
- Control System 1st Mid Term Paper July Dec 2015Document17 pagesControl System 1st Mid Term Paper July Dec 2015VIPUL100% (1)
- IC6701 May 18 With KeyDocument14 pagesIC6701 May 18 With KeyAnonymous yO7rcec6vuNo ratings yet
- Reliability of Utensils Manufacturing Plant - A Case StudyDocument10 pagesReliability of Utensils Manufacturing Plant - A Case StudyHozefa AjmerwalaNo ratings yet
- Sheet 4Document2 pagesSheet 4bipico9217No ratings yet
- Experiment 4Document8 pagesExperiment 4Tonie Adrian DiamanteNo ratings yet
- ME 360 Control Systems PID Control of A Spring-Mass-Damper (SMD) PositionDocument7 pagesME 360 Control Systems PID Control of A Spring-Mass-Damper (SMD) Positionjamesyboy100No ratings yet
- Me2009 - Control System Technology Lab Assignment 4: Hochiminh City University of Technology Mechatronics DepartmentDocument10 pagesMe2009 - Control System Technology Lab Assignment 4: Hochiminh City University of Technology Mechatronics DepartmentNguyễn Hồng MỹNo ratings yet
- Practice Exam QuestionsDocument3 pagesPractice Exam QuestionsBrendanNo ratings yet
- CT Dec 2011Document3 pagesCT Dec 2011vpj100No ratings yet
- Classical Control: 1 ReadingDocument1 pageClassical Control: 1 ReadingIbrahim MoamenNo ratings yet
- Analysis of Algorithm FinalDocument11 pagesAnalysis of Algorithm FinalJohnny WangNo ratings yet
- Lag Compensator Design Using Root Locus Technique: ObjectivesDocument7 pagesLag Compensator Design Using Root Locus Technique: ObjectivesMuhammad AdeelNo ratings yet
- MEC E 420 Feedback Control Dynamic SystemsDocument8 pagesMEC E 420 Feedback Control Dynamic SystemscatzzruleNo ratings yet
- A.K. Tripathi - Control Systems DRILL (200 Plus New Questions With Meticulous Solutions) For GATE - ESE-2018Document128 pagesA.K. Tripathi - Control Systems DRILL (200 Plus New Questions With Meticulous Solutions) For GATE - ESE-2018MADHAV PARIHARNo ratings yet
- B - Lecture11 Extension of The Root Locus Automatic Control SystemDocument15 pagesB - Lecture11 Extension of The Root Locus Automatic Control SystemAbaziz Mousa OutlawZz100% (1)
- FPGA Implementation of A Sequential Extended Kalman Filter Algorithm Applied To Mobile Robotics Localization ProblemDocument4 pagesFPGA Implementation of A Sequential Extended Kalman Filter Algorithm Applied To Mobile Robotics Localization ProblemCarlos Humberto LlanosNo ratings yet
- EE 312 Lecture 1Document12 pagesEE 312 Lecture 1دكتور كونوهاNo ratings yet
- Ee09 l07 Digital Control System Model QPDocument4 pagesEe09 l07 Digital Control System Model QPGīřïşh McNo ratings yet
- Control System Lab File: Department of Electrical EngineeringDocument14 pagesControl System Lab File: Department of Electrical EngineeringSAURABH AGRAWALNo ratings yet
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- G S D(S) N S D S N S D S: EC5: Control SystemsDocument7 pagesG S D(S) N S D S N S D S: EC5: Control SystemsMANOJ KUMAR DASNo ratings yet
- Vout Vin: EC2006: Control SystemsDocument6 pagesVout Vin: EC2006: Control SystemsMANOJ KUMAR DASNo ratings yet
- Nyquist Plot ExptDocument7 pagesNyquist Plot ExptMANOJ KUMAR DASNo ratings yet
- Irradienc E Temperature Pmax VPP Duty: Effect of IrradianceDocument1 pageIrradienc E Temperature Pmax VPP Duty: Effect of IrradianceMANOJ KUMAR DASNo ratings yet
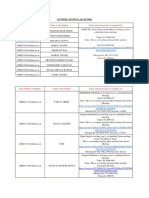
- Roll Number of Student Name of The Student Name and Zoom Link of Assigned TADocument2 pagesRoll Number of Student Name of The Student Name and Zoom Link of Assigned TAMANOJ KUMAR DASNo ratings yet
- Mast332 Comp367 4 19Document2 pagesMast332 Comp367 4 19fdsfdfNo ratings yet
- Applied Linear Statistical ModelDocument111 pagesApplied Linear Statistical ModelJordan BrianNo ratings yet
- 4 Determinants: Level-IIDocument27 pages4 Determinants: Level-IIBaljeet Singh100% (1)
- Web Archive Org Web 20130331071956 HTTP WWW Mathmovesu Com Res PDF Mmu Decimals Add SubtractDocument2 pagesWeb Archive Org Web 20130331071956 HTTP WWW Mathmovesu Com Res PDF Mmu Decimals Add Subtractapi-249283966No ratings yet
- 03MQP Mat PDFDocument2 pages03MQP Mat PDFhoneylibra9378No ratings yet
- Mechanics Guidelines 23 Div ST Fair ExhibitDocument8 pagesMechanics Guidelines 23 Div ST Fair ExhibitMarilyn GarciaNo ratings yet
- Hecke Operators and Hecke TheoryDocument5 pagesHecke Operators and Hecke TheoryShashank JaiswalNo ratings yet
- FALLSEM2022-23 BMAT101L TH VL2022230106547 Reference Material I 20-10-2022 Practice Problems-IIDocument13 pagesFALLSEM2022-23 BMAT101L TH VL2022230106547 Reference Material I 20-10-2022 Practice Problems-IIHashNo ratings yet
- Vectgui: A Matlab-Based Simulation Tool: Ozlem Ozgun and Levent SevgiDocument6 pagesVectgui: A Matlab-Based Simulation Tool: Ozlem Ozgun and Levent SevgiOzlem OzgunNo ratings yet
- Monte Carlo Simulation in JavaDocument15 pagesMonte Carlo Simulation in JavaManoj Kavedia100% (1)
- Internal Order in Crystals1Document35 pagesInternal Order in Crystals1Kripa KattelNo ratings yet
- Equilibrium Temperature DistributionsDocument14 pagesEquilibrium Temperature DistributionsAlejo PirakokNo ratings yet
- Discrete MathematicsDocument3 pagesDiscrete MathematicsSaanidhNo ratings yet
- FFJM - Semi-Finals - March 21, 2015: Start All ParticipantsDocument2 pagesFFJM - Semi-Finals - March 21, 2015: Start All ParticipantsTapas HiraNo ratings yet
- Workshop On Time Series Econometrics and Its ApplicationDocument4 pagesWorkshop On Time Series Econometrics and Its ApplicationMukesh BishtNo ratings yet
- Week 2 DF Feedback Fall 2012Document6 pagesWeek 2 DF Feedback Fall 2012joshblumberg100% (1)
- Java-Fundamentals-Regular-Expressions-ExerciseDocument6 pagesJava-Fundamentals-Regular-Expressions-Exerciseamaya fallsNo ratings yet
- 04 - Logic Gates and Boolean AlgebraDocument44 pages04 - Logic Gates and Boolean AlgebraGirishNo ratings yet
- Regularization and Feature Selection: Big Data For Economic ApplicationsDocument39 pagesRegularization and Feature Selection: Big Data For Economic ApplicationsValerio ZarrelliNo ratings yet
- Scie Method Lesson 4Document8 pagesScie Method Lesson 4vicNo ratings yet
- Practical Appraisal MathematicsDocument6 pagesPractical Appraisal MathematicsJen ManriqueNo ratings yet
- Cayley Graphs PDFDocument167 pagesCayley Graphs PDFDaniel PintoNo ratings yet
- Import Public Class Static Static Static Int Static Static Int Static IntDocument7 pagesImport Public Class Static Static Static Int Static Static Int Static IntAris KostopoulosNo ratings yet
- General Engineering ReviewDocument24 pagesGeneral Engineering ReviewRei RaguindinNo ratings yet
- Determinants Important QuestionsDocument13 pagesDeterminants Important QuestionsShivam SoniNo ratings yet
- f5 c8 Probability Distribution NewDocument7 pagesf5 c8 Probability Distribution NewYoga NathanNo ratings yet
- 4 1 - 4 3 ReviewDocument6 pages4 1 - 4 3 Reviewapi-304973436No ratings yet
- Excel FormulasDocument15 pagesExcel FormulasJeffrey DapitoNo ratings yet