You might also like
- Commensurabilities among Lattices in PU (1,n). (AM-132), Volume 132From EverandCommensurabilities among Lattices in PU (1,n). (AM-132), Volume 132No ratings yet
- Cohomology Operations (AM-50), Volume 50: Lectures by N. E. Steenrod. (AM-50)From EverandCohomology Operations (AM-50), Volume 50: Lectures by N. E. Steenrod. (AM-50)No ratings yet
- Final HomeworkDocument1 pageFinal HomeworkPro HackedNo ratings yet
- Control Systems LAB # 8 Design Via Root Locus: Example: Find The Root Locus For The T.F Matlab CodeDocument6 pagesControl Systems LAB # 8 Design Via Root Locus: Example: Find The Root Locus For The T.F Matlab CodeiyerrohitNo ratings yet
- Introduction To Control Engineering WorksheetDocument2 pagesIntroduction To Control Engineering Worksheetmillion shiferawNo ratings yet
- Control System - 1 PYQsDocument7 pagesControl System - 1 PYQsAbhishekNo ratings yet
- Control System 1st Mid Term Paper July Dec 2015Document17 pagesControl System 1st Mid Term Paper July Dec 2015VIPUL100% (1)
- Signals and Systems Laboratory 7Document9 pagesSignals and Systems Laboratory 7Kthiha CnNo ratings yet
- 16-EL-A2 - Mai 2017 - Version AnglaiseDocument7 pages16-EL-A2 - Mai 2017 - Version Anglaisemadani abdelhamidNo ratings yet
- Practice Exam QuestionsDocument3 pagesPractice Exam QuestionsBrendanNo ratings yet
- Classical Control: 1 ReadingDocument1 pageClassical Control: 1 ReadingIbrahim MoamenNo ratings yet
- Experiment 4Document8 pagesExperiment 4Tonie Adrian DiamanteNo ratings yet
- Birla Institute of Technology & Science, Pilani Second Semester, 2020-21 Control Systems (EEE/INSTR F242) AssignmentDocument1 pageBirla Institute of Technology & Science, Pilani Second Semester, 2020-21 Control Systems (EEE/INSTR F242) AssignmentRishi GuptaNo ratings yet
- MatlabDocument1 pageMatlabjoydeep12No ratings yet
- Control Engineering - Question BankDocument6 pagesControl Engineering - Question BankGurusharan Narasimha MurthyNo ratings yet
- Adobe Scan 14 Nov 2021 (23) (7) - 1Document3 pagesAdobe Scan 14 Nov 2021 (23) (7) - 1HarshNo ratings yet
- CS Mid 2Document3 pagesCS Mid 2SHEKHARNo ratings yet
- G(S) K S (s+10) K S (s+0.5) (SDocument3 pagesG(S) K S (s+10) K S (s+0.5) (SSHEKHARNo ratings yet
- K Ss S S: WorksheetDocument3 pagesK Ss S S: WorksheetBelayneh AbirhamNo ratings yet
- Assignment - ControlInstrumentationDocument4 pagesAssignment - ControlInstrumentationStieve NjorogeNo ratings yet
- Sheet 1Document3 pagesSheet 1bipico9217No ratings yet
- Objective: R (S) K G (S) Y (S)Document6 pagesObjective: R (S) K G (S) Y (S)Mujtaba HusseinNo ratings yet
- CS EC Paper End Sem BPDocument1 pageCS EC Paper End Sem BPPRASANTA ROYNo ratings yet
- 2019-May EED-321 62Document2 pages2019-May EED-321 62Aditya KapoorNo ratings yet
- GENG5503 Modern Control Systems Lab 1 Mathematical Modeling: V. SreeramDocument6 pagesGENG5503 Modern Control Systems Lab 1 Mathematical Modeling: V. SreeramVictor SreeramNo ratings yet
- EC5: Control Systems: C(S) R(S) G(S)Document10 pagesEC5: Control Systems: C(S) R(S) G(S)MANOJ KUMAR DASNo ratings yet
- Control Exp 8 Student ManualDocument7 pagesControl Exp 8 Student ManualSyed Nahid Ahmed TopuNo ratings yet
- CS 16 MARK Unit 5 OnlyDocument6 pagesCS 16 MARK Unit 5 OnlySaravana KumarNo ratings yet
- AE61Document4 pagesAE61Anima SenNo ratings yet
- Question Bank Mathematical MoellingDocument6 pagesQuestion Bank Mathematical Moellingshama JNo ratings yet
- Lab # 9 Control SystemDocument10 pagesLab # 9 Control SystemZabeehullahmiakhailNo ratings yet
- Old Question Paper Control SystemsDocument7 pagesOld Question Paper Control SystemsSatendra KushwahaNo ratings yet
- VI Sem ECEDocument12 pagesVI Sem ECESenthil Kumar KrishnanNo ratings yet
- Root Locus Bonus v2Document7 pagesRoot Locus Bonus v2AmreshAmanNo ratings yet
- Advanced Control TheoryDocument4 pagesAdvanced Control TheoryAmit BansodNo ratings yet
- HW1Document3 pagesHW1Anshu Singh0% (1)
- Midsem 21-22Document4 pagesMidsem 21-22nan.sayan30No ratings yet
- Homework 5Document3 pagesHomework 5saiNo ratings yet
- Root LocusDocument3 pagesRoot LocusAbhay KumarNo ratings yet
- Electrical Engineering Engineering Control Systems Stability in The Frequency Domain NotesDocument13 pagesElectrical Engineering Engineering Control Systems Stability in The Frequency Domain NotesSwapnil Gade007No ratings yet
- BMS College of Engineering, Bangalore-560019: May 2016 Semester End Main ExaminationsDocument3 pagesBMS College of Engineering, Bangalore-560019: May 2016 Semester End Main Examinationskoushik bhatNo ratings yet
- 06 ESm 43 MQDocument6 pages06 ESm 43 MQGuruprasadNo ratings yet
- 16-EL-A2 - Novembre 2017 - Version AnglaiseDocument7 pages16-EL-A2 - Novembre 2017 - Version AnglaiseKahina ZitouniNo ratings yet
- Tutorial 8Document2 pagesTutorial 8Gaurav ANo ratings yet
- MEC E 420 Feedback Control Dynamic SystemsDocument8 pagesMEC E 420 Feedback Control Dynamic SystemscatzzruleNo ratings yet
- Root LocusDocument95 pagesRoot LocusPiyooshTripathi100% (1)
- Electrical-Engineering Engineering Control-Systems Root-Locus-Techniques NotesDocument23 pagesElectrical-Engineering Engineering Control-Systems Root-Locus-Techniques NotesRahul TaldaNo ratings yet
- Lab 4Document16 pagesLab 4Maitha SaeedNo ratings yet
- 141312-141701-Control - Winter - 2013 CT PDFDocument2 pages141312-141701-Control - Winter - 2013 CT PDFvisupinuNo ratings yet
- Control SystemDocument8 pagesControl SystemSabyasachi SamalNo ratings yet
- A.K. Tripathi - Control Systems DRILL (200 Plus New Questions With Meticulous Solutions) For GATE - ESE-2018Document128 pagesA.K. Tripathi - Control Systems DRILL (200 Plus New Questions With Meticulous Solutions) For GATE - ESE-2018MADHAV PARIHARNo ratings yet
- ControlDocument55 pagesControlHuyThaiNo ratings yet
- Assignment NewDocument10 pagesAssignment NewChitra M. chitra.eceNo ratings yet
- EAC533 - LCS - Assignment I QuestionDocument2 pagesEAC533 - LCS - Assignment I Questionmeseret sisayNo ratings yet
- EC602 Control Q Bank 2023Document9 pagesEC602 Control Q Bank 2023ROHAN CHOWDHURYNo ratings yet
- VL2022230502064 Da02Document2 pagesVL2022230502064 Da02Asmit Anand Singh 21BEE0130No ratings yet
- Control System Important QuestionsDocument2 pagesControl System Important QuestionsSANKARA REDDYNo ratings yet
- Lab 05 Updated Spring 23Document5 pagesLab 05 Updated Spring 23arshadabdNo ratings yet
- r05220205 Control SystemsDocument9 pagesr05220205 Control SystemsandhracollegesNo ratings yet
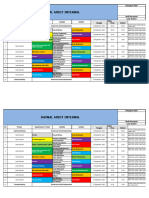
- Schedule Audit InternalDocument18 pagesSchedule Audit InternalMIE Internal Audit100% (1)
- Full Download Fundamentals of Human Resource Management 5th Edition Dessler Solutions ManualDocument36 pagesFull Download Fundamentals of Human Resource Management 5th Edition Dessler Solutions Manualflautistimpend.bkjv100% (33)
- Reporting 3ADocument2 pagesReporting 3AESCARO, JOSHUA G.No ratings yet
- Jurnal Literasi FranchiseDocument11 pagesJurnal Literasi Franchiseotniel adam putra tamasonNo ratings yet
- Dina Sri Hastuti 2203003 MRPDocument5 pagesDina Sri Hastuti 2203003 MRPsyaifaeza.jbgNo ratings yet
- Activity On NodeDocument4 pagesActivity On Node2212282No ratings yet
- Practice QuestionsDocument3 pagesPractice QuestionsBlair ZhangNo ratings yet
- Ch02 DSS BIDocument91 pagesCh02 DSS BIMinh Bùi Vũ NguyệtNo ratings yet
- K. NASKAH PUBLIKASI ANDRE YAHYA 20130420246Document25 pagesK. NASKAH PUBLIKASI ANDRE YAHYA 20130420246Mariaa IvannaNo ratings yet
- 18ME71 CE Student Notes UpdatedDocument251 pages18ME71 CE Student Notes UpdatedbharathahsNo ratings yet
- GRU UiTMDocument51 pagesGRU UiTMKhai MNo ratings yet
- Historyof SWOTAnalysisDocument4 pagesHistoryof SWOTAnalysisNety Nurda MaidaNo ratings yet
- Andre Setiawan - 2203001 - Tugas TSP MRPDocument6 pagesAndre Setiawan - 2203001 - Tugas TSP MRPsyaifaeza.jbgNo ratings yet
- PESTEL Analysis SlidesDocument20 pagesPESTEL Analysis SlidesOsvaldo GonçalvesNo ratings yet
- HeadingDocument8 pagesHeadingayushtiwari377No ratings yet
- Mid-Term ExamDocument3 pagesMid-Term Exambipico9217No ratings yet
- Tugas HUKUM KONTRAK BISNIS INSTERNASIONALDocument5 pagesTugas HUKUM KONTRAK BISNIS INSTERNASIONALnovaaprianto253No ratings yet
- Strategic Management OutlineDocument3 pagesStrategic Management OutlineDarleen Joy UdtujanNo ratings yet
- Publish IFS Food V8 in Apr 2023-1Document150 pagesPublish IFS Food V8 in Apr 2023-1Remmber Much TarwiraNo ratings yet
- CFAP 3 - Practice Kit (Final)Document208 pagesCFAP 3 - Practice Kit (Final)Rana gNo ratings yet
- Assignment 2Document11 pagesAssignment 2nan.sayan30No ratings yet
- A3 - Lembar Kerja Studi KasusDocument10 pagesA3 - Lembar Kerja Studi KasusIkayama Satria PutraNo ratings yet
- Result MLS IIDocument9 pagesResult MLS IITEJAS gosaviNo ratings yet
- IOM Enrichment Exercise 1Document4 pagesIOM Enrichment Exercise 1Rogen Darell AbanNo ratings yet
- Company Profile and SWOT Analysis Reports: Full Product ListDocument176 pagesCompany Profile and SWOT Analysis Reports: Full Product ListRobert PhillipsNo ratings yet
- دور أدلة الإثبات في تحسين جودة عملية التدقيق وفقا لمعايير التدقيق الجزائريةDocument14 pagesدور أدلة الإثبات في تحسين جودة عملية التدقيق وفقا لمعايير التدقيق الجزائريةAmertumeEnPersonneNo ratings yet
- Chapter 2 - Sliding Mode ControlDocument30 pagesChapter 2 - Sliding Mode Controldtran2354No ratings yet
- The Modularity of Mind - Fodor PDFDocument170 pagesThe Modularity of Mind - Fodor PDFVrd AdiNo ratings yet
- Block Diagram and Signal Flow GraphsDocument23 pagesBlock Diagram and Signal Flow GraphsPuneeth G PrasadNo ratings yet
- CH 08Document8 pagesCH 08Trần Lê ThiệnNo ratings yet