You might also like
- EC135 Autopilot July 2004Document105 pagesEC135 Autopilot July 2004Евгений Касьянов100% (3)
- 2003 200 Bow RiderDocument36 pages2003 200 Bow Riderbbenz62No ratings yet
- AutoLISP For EveryoneDocument36 pagesAutoLISP For Everyonesuriwaits100% (3)
- TEC BAS 10 - ABAP Performance Tips & Tricks - v2003Document26 pagesTEC BAS 10 - ABAP Performance Tips & Tricks - v2003pilusoNo ratings yet
- 4) AES Algorithm and Block Cipher Modes of OperationsDocument40 pages4) AES Algorithm and Block Cipher Modes of OperationsBhanu NaikNo ratings yet
- Utilizing NX Advanced Simulation For NASA's New Mobile Launcher For Ares-LDocument30 pagesUtilizing NX Advanced Simulation For NASA's New Mobile Launcher For Ares-LAnand RajendranNo ratings yet
- Emc VNX Vnxe3150: Installation GuideDocument26 pagesEmc VNX Vnxe3150: Installation GuideMushab YushariNo ratings yet
- Introduction To Cmos Vlsi Design: Sequential CircuitsDocument54 pagesIntroduction To Cmos Vlsi Design: Sequential Circuitsamitmodak89No ratings yet
- TLA-6T214ALF For Lenovo T420Document34 pagesTLA-6T214ALF For Lenovo T420Ramdas KambleNo ratings yet
- Hardware Implementation of Trace Transform: Pramod K (USN: 2BV09LDE06) Under Guidence of Prof. Meena S MDocument21 pagesHardware Implementation of Trace Transform: Pramod K (USN: 2BV09LDE06) Under Guidence of Prof. Meena S MkaranampramodNo ratings yet
- Fundamentals of Deep Learning: Part 5: Pre-Trained ModelsDocument18 pagesFundamentals of Deep Learning: Part 5: Pre-Trained ModelsPraveen SinghNo ratings yet
- Paper 1: February 2021Document30 pagesPaper 1: February 2021zubair nawazNo ratings yet
- Slide 5Document18 pagesSlide 5Felipe Arias Russi (SkyBlueU)No ratings yet
- Audio Chord Recognition: Using Deep Neural NetworksDocument26 pagesAudio Chord Recognition: Using Deep Neural NetworksAarushi VyassNo ratings yet
- Appendix: Technical Specifications and Special Features of The S7-400Document15 pagesAppendix: Technical Specifications and Special Features of The S7-400sina20795No ratings yet
- Sendmessage and TCPIP PDFDocument24 pagesSendmessage and TCPIP PDFRey TmoNo ratings yet
- Wassink FMC Vs Paut WebsiteDocument29 pagesWassink FMC Vs Paut Websiteiraj sedaghatiNo ratings yet
- Aerospace Grade: DescriptionDocument2 pagesAerospace Grade: DescriptionMueed LiaqatNo ratings yet
- Day 3Document21 pagesDay 3Joshua Kofi AddoNo ratings yet
- SSL PT Manual 2011 BarDocument12 pagesSSL PT Manual 2011 BarkmabdNo ratings yet
- SSL PT Manual 2011 ExternalDocument11 pagesSSL PT Manual 2011 ExternalkmabdNo ratings yet
- Hyd Stage 1 QuestionDocument7 pagesHyd Stage 1 QuestionfostacfssairecruiterNo ratings yet
- Arithmetic Flags and Instructions: S. DandamudiDocument48 pagesArithmetic Flags and Instructions: S. DandamudiMohamed NabilNo ratings yet
- Demo of Smart Stress Iso-NewDocument11 pagesDemo of Smart Stress Iso-NewDam VoNo ratings yet
- 4V Drive NCH+NCH MOS FET: TransistorsDocument6 pages4V Drive NCH+NCH MOS FET: TransistorsGioVoTamNo ratings yet
- 4V Drive NCH+NCH MOS FET: TransistorsDocument6 pages4V Drive NCH+NCH MOS FET: TransistorsFahd AfifiNo ratings yet
- 4V Drive NCH+NCH MOS FET: TransistorsDocument6 pages4V Drive NCH+NCH MOS FET: TransistorsGioVoTamNo ratings yet
- Drilledge: Application of Case-Base Reasoning : Timothy J. SheehyDocument29 pagesDrilledge: Application of Case-Base Reasoning : Timothy J. Sheehyk_fatahiNo ratings yet
- Datasheet m35055 - Video Character GeneratorDocument51 pagesDatasheet m35055 - Video Character Generatormaster -DvNo ratings yet
- Sophos Switch Series - Technical SpecificationsDocument1 pageSophos Switch Series - Technical SpecificationsZakaria AxeliNo ratings yet
- Catalogo Lipro 2024Document171 pagesCatalogo Lipro 2024rogerio.aalmeida1No ratings yet
- Atari Macro Assembler UM PDFDocument60 pagesAtari Macro Assembler UM PDFDavid EaslerNo ratings yet
- MATLAB Workshop Lecture 2Document35 pagesMATLAB Workshop Lecture 2haashillNo ratings yet
- Transient Results and Response Spectra: Sofistik 2020Document25 pagesTransient Results and Response Spectra: Sofistik 2020Chris LumyNo ratings yet
- DRAM Design Overview: Stanford CS Junji Ogawa MH Students Feb. 11th. 1999Document21 pagesDRAM Design Overview: Stanford CS Junji Ogawa MH Students Feb. 11th. 1999Rahul DubeyNo ratings yet
- Chapter-II Symmetric and Asymmetric Key CryptographyDocument76 pagesChapter-II Symmetric and Asymmetric Key Cryptographyshivamsaidane09No ratings yet
- G-Kod CNC Programiranje - PDF - Belt (Mechanical) - ScrewDocument1 pageG-Kod CNC Programiranje - PDF - Belt (Mechanical) - ScrewRadionica FilaNo ratings yet
- Solution: Petri Nets - Homework 1Document5 pagesSolution: Petri Nets - Homework 1YouniBaderNo ratings yet
- Im Supplement Torque Tube Identification 249 Sensors Fisher en 126696Document2 pagesIm Supplement Torque Tube Identification 249 Sensors Fisher en 126696Rachmat MaulanaNo ratings yet
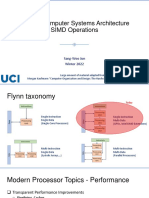
- Lec12 - SIMDDocument36 pagesLec12 - SIMDJane HeNo ratings yet
- N Channel, P Channel Fabrication by School of MicroelectronicsDocument44 pagesN Channel, P Channel Fabrication by School of MicroelectronicsjouleNo ratings yet
- ch1 (20231004)Document32 pagesch1 (20231004)jane8773No ratings yet
- Worldwide Hoist Classification Comparison ListDocument1 pageWorldwide Hoist Classification Comparison ListCarlos Andrés Arango H.No ratings yet
- Implementation of 128-Bit AES Algorithm in MATLABDocument5 pagesImplementation of 128-Bit AES Algorithm in MATLABAlaa HassanNo ratings yet
- CNS Unit 3Document178 pagesCNS Unit 3sonor25972No ratings yet
- TVL (Specialization) Specialization First Semester Second Semester First Semester Second SemesterDocument1 pageTVL (Specialization) Specialization First Semester Second Semester First Semester Second SemesterDennis Niño AnchetaNo ratings yet
- Projek Sarjana Muda 1 (SMJ 4912) 25 OCTOBER 2009: Universiti Technology Malaysia Faculti Kejuruteraan MekanikalDocument42 pagesProjek Sarjana Muda 1 (SMJ 4912) 25 OCTOBER 2009: Universiti Technology Malaysia Faculti Kejuruteraan MekanikalKamarul NizamNo ratings yet
- FunctionPackages YRC1000micro E 04.2019Document44 pagesFunctionPackages YRC1000micro E 04.2019Sarafraj BegNo ratings yet
- Mainframe INTERVIEW - QA11Document170 pagesMainframe INTERVIEW - QA11PRATHIBA_MNo ratings yet
- Computer Science Xii Model Test Paper 1 (Solved)Document7 pagesComputer Science Xii Model Test Paper 1 (Solved)Yuvraj BhagatNo ratings yet
- Modue 2 - APPLICATIONS OF BPNDocument40 pagesModue 2 - APPLICATIONS OF BPNproject missionNo ratings yet
- ST19 STB23 24bDocument10 pagesST19 STB23 24bJONHCENA13No ratings yet
- 01 - Introduction To ABAP ProgrammingDocument32 pages01 - Introduction To ABAP ProgrammingHoney Swapna100% (1)
- OFDM & Cyclic PrefixDocument37 pagesOFDM & Cyclic PrefixRani KumariNo ratings yet
- Designcon 2011: Capacitor Modeling Requirements in The 21St CenturyDocument21 pagesDesigncon 2011: Capacitor Modeling Requirements in The 21St CenturySerNo ratings yet
- Microsoft Power Point - 2) PTN 3900 Hardware DescriptionDocument32 pagesMicrosoft Power Point - 2) PTN 3900 Hardware DescriptionAlex Geovanni NuñezNo ratings yet
- Single-Cycle Processors: Datapath & Control: Computer Science & Artificial Intelligence Lab M.I.TDocument34 pagesSingle-Cycle Processors: Datapath & Control: Computer Science & Artificial Intelligence Lab M.I.TEmin KültürelNo ratings yet
- VLSI Design Lab PDFDocument109 pagesVLSI Design Lab PDFKvnsumeshChandraNo ratings yet
- MATLAB Workshop Lecture 2Document35 pagesMATLAB Workshop Lecture 2RashmiNo ratings yet
- HouseDocument2 pagesHouseGhulam HussainNo ratings yet
- ch4 Procs ProgsDocument26 pagesch4 Procs ProgsGhulam HussainNo ratings yet
- CubeDocument3 pagesCubeGhulam HussainNo ratings yet
- Basic Computer Organization: S. DandamudiDocument48 pagesBasic Computer Organization: S. DandamudiGhulam HussainNo ratings yet
- ch1 IntroDocument16 pagesch1 IntroGhulam HussainNo ratings yet
- Overview of Assembly Language: S. DandamudiDocument61 pagesOverview of Assembly Language: S. DandamudiGhulam HussainNo ratings yet
- Track Consignment: Indicates A Required Field. Consignment NumberDocument2 pagesTrack Consignment: Indicates A Required Field. Consignment Numbersatish serialNo ratings yet
- 1631 GCS200731 NgoTranBaoPhuc Assignment 2Document30 pages1631 GCS200731 NgoTranBaoPhuc Assignment 2Khac HungduongNo ratings yet
- Road Map For SSODocument7 pagesRoad Map For SSOunnatiNo ratings yet
- Section 10.1: Boolean FunctionsDocument23 pagesSection 10.1: Boolean FunctionsOsamah AzamNo ratings yet
- Technical Specifications: Bank Directory PlusDocument94 pagesTechnical Specifications: Bank Directory Plussrinidhi nNo ratings yet
- Shortcut Keys For Windows 10: IT Showcase Productivity GuideDocument2 pagesShortcut Keys For Windows 10: IT Showcase Productivity Guideivan zulmyNo ratings yet
- Mind Meister and Word ScrambleDocument21 pagesMind Meister and Word ScrambleAgni ShaputriNo ratings yet
- Delta Merge Is Not Running in HANADocument3 pagesDelta Merge Is Not Running in HANAankurbamelNo ratings yet
- ML Job-Ready ChecklistDocument9 pagesML Job-Ready ChecklistSivapriya PNo ratings yet
- Moritz, S. - 2010-imputeTS Time Series Missing ValueDocument12 pagesMoritz, S. - 2010-imputeTS Time Series Missing ValueJuan Francisco Durango GrisalesNo ratings yet
- Management of Information: Ethical and Social IssuesDocument46 pagesManagement of Information: Ethical and Social IssuesKiel JohnNo ratings yet
- GAINWARD GeForce RTX 2060 12GB GHOSTDocument1 pageGAINWARD GeForce RTX 2060 12GB GHOSTLwigNo ratings yet
- 2020 Spacewell IWMS+White Paper - INDocument20 pages2020 Spacewell IWMS+White Paper - INkapatil11No ratings yet
- Java Programming Lab ManualDocument36 pagesJava Programming Lab ManualRAJESHNo ratings yet
- Troubleshooting GuideDocument260 pagesTroubleshooting GuideJose Eduardo Espinoza OrihuelaNo ratings yet
- BMC Kirpi Mine-Resistant Ambush - Protected Vehicle (MRAP) : TrendingDocument6 pagesBMC Kirpi Mine-Resistant Ambush - Protected Vehicle (MRAP) : TrendingDénes BereczNo ratings yet
- Task Performance - Entrep MindDocument2 pagesTask Performance - Entrep MindRyan DizonNo ratings yet
- BlockchainIEEE 600W v3.3Document11 pagesBlockchainIEEE 600W v3.3Farhan NovyanNo ratings yet
- Viasat intoduction-MEOLINK-MODEM PDFDocument154 pagesViasat intoduction-MEOLINK-MODEM PDFosadeamos8684No ratings yet
- Shelly Cashman Series Microsoft Office 365 and Access 2016 Introductory 1st Edition Pratt Solutions Manual 1Document11 pagesShelly Cashman Series Microsoft Office 365 and Access 2016 Introductory 1st Edition Pratt Solutions Manual 1shirley100% (46)
- PF ControlDocument32 pagesPF ControlSeptiatik AjaNo ratings yet
- Dps Stock Opname Seasson2 - TemplateDocument286 pagesDps Stock Opname Seasson2 - TemplateFranky AugustNo ratings yet
- JalTest Soft (JalTest V2-V3) Manual - 2Document43 pagesJalTest Soft (JalTest V2-V3) Manual - 2iMac DiggerNo ratings yet
- DD netfx20MSI613BDocument1,076 pagesDD netfx20MSI613BjoaojpcmNo ratings yet
- ECOSYS P2235dw-P2040dw SERVICE MANUAL 1Document73 pagesECOSYS P2235dw-P2040dw SERVICE MANUAL 1Ivan AvilaNo ratings yet
- Ashida 1 MVA Installation GuideDocument9 pagesAshida 1 MVA Installation GuideAnmol SrivastavaNo ratings yet
- StructsDocument24 pagesStructssaifulNo ratings yet
- Statistical PERT Normal Edition Quick Start Guide For Version 5.0Document21 pagesStatistical PERT Normal Edition Quick Start Guide For Version 5.0PabloNo ratings yet
- Ppad Aspd Sleman Tahap I Literasi Bahasa InggrisDocument34 pagesPpad Aspd Sleman Tahap I Literasi Bahasa Inggrisnugrahosabar12No ratings yet