You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5806)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Modeling Study of Single-Well EGS Configurations 2010-04Document12 pagesModeling Study of Single-Well EGS Configurations 2010-04orso brunoNo ratings yet
- EGS Designs With Horizontal Wells, Multiple Stages, and Proppant 2014-02Document13 pagesEGS Designs With Horizontal Wells, Multiple Stages, and Proppant 2014-02orso brunoNo ratings yet
- Casing Solutions in High or Very High Temperature Geothermal Environment, 2018Document10 pagesCasing Solutions in High or Very High Temperature Geothermal Environment, 2018orso brunoNo ratings yet
- SPE-205152 Offset Data Analysis and Seam Less Execution Through Real TimeMonitoring Improve Drilling PerformanceDocument21 pagesSPE-205152 Offset Data Analysis and Seam Less Execution Through Real TimeMonitoring Improve Drilling Performanceorso brunoNo ratings yet
- EX 0036 Drilling English Metric 0.0981 Formula SheetDocument4 pagesEX 0036 Drilling English Metric 0.0981 Formula Sheetorso brunoNo ratings yet
- Gujarat Technological UniversityDocument3 pagesGujarat Technological UniversityMohsin AnsariNo ratings yet
- 6th Semester SyllabusDocument20 pages6th Semester SyllabusVishal BhargavaNo ratings yet
- Power SystemsDocument16 pagesPower SystemsSiva Prasad PadilamNo ratings yet
- Expressing One Quantity As A Percentage of Another: Grade D/EDocument10 pagesExpressing One Quantity As A Percentage of Another: Grade D/EzaeemNo ratings yet
- Personal Social Repaso ADE 2016Document24 pagesPersonal Social Repaso ADE 2016dieg028No ratings yet
- Fixed Length and Horizontal Compositing Options in MinesightDocument7 pagesFixed Length and Horizontal Compositing Options in MinesightJosé R. CastroNo ratings yet
- Epoch Forumotions in t67 General Sas Macro Interview QuestioDocument8 pagesEpoch Forumotions in t67 General Sas Macro Interview QuestioNagesh KhandareNo ratings yet
- Existence of Walrasian Equilibrium: Proof For The Two-Goods CaseDocument3 pagesExistence of Walrasian Equilibrium: Proof For The Two-Goods CasezkNo ratings yet
- Test 34 + Answer KeyDocument7 pagesTest 34 + Answer KeyLê Kiều TrangNo ratings yet
- Fisher's Linear Discriminant: Jianxin WuDocument18 pagesFisher's Linear Discriminant: Jianxin WuXg WuNo ratings yet
- Mips IsaDocument79 pagesMips Isaphan_vinh_20No ratings yet
- Be - Mechanical Engineering - Semester 5 - 2019 - May - Dynamics of Machinery Dom CbcgsDocument1 pageBe - Mechanical Engineering - Semester 5 - 2019 - May - Dynamics of Machinery Dom CbcgsVaibhavPawarNo ratings yet
- Rankine Earth Pressure Theory PDFDocument4 pagesRankine Earth Pressure Theory PDFgitrixNo ratings yet
- What Is The Relation Between Resolution III and Confounded ResponsesDocument50 pagesWhat Is The Relation Between Resolution III and Confounded ResponsesrohitrealisticNo ratings yet
- Mathcad - Postfilter-Feedback-Halfbridge-Single-Supply-170VDocument6 pagesMathcad - Postfilter-Feedback-Halfbridge-Single-Supply-170Vfarid.mmdNo ratings yet
- Ukuran Asosiasi Dalam Epidemiologi: Putri Handayani, M. KKKDocument28 pagesUkuran Asosiasi Dalam Epidemiologi: Putri Handayani, M. KKKNHLNo ratings yet
- Data StructuresDocument18 pagesData StructuresDeepak Kumar MehtaNo ratings yet
- EEE248 CNG232 Lab2 3 Spring2012Document10 pagesEEE248 CNG232 Lab2 3 Spring2012Aziz Nihat GürsoyNo ratings yet
- Circuit Analysis Technique Mesh (Loop) Current Method (Maxwell's Method)Document8 pagesCircuit Analysis Technique Mesh (Loop) Current Method (Maxwell's Method)Rahma HanifaNo ratings yet
- DC Transient Analysis Using SimulationDocument6 pagesDC Transient Analysis Using SimulationJanani RangarajanNo ratings yet
- Chap04 PDFDocument32 pagesChap04 PDFSehrelilNo ratings yet
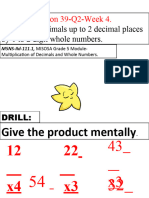
- Lesson 39 Multiplies Decimals Up To 2 Decimal Places by 1 To 2 Digit Whole Numbers.Document23 pagesLesson 39 Multiplies Decimals Up To 2 Decimal Places by 1 To 2 Digit Whole Numbers.Rugenie DomingoNo ratings yet
- Y4 Autumn WhiteRoseDocument155 pagesY4 Autumn WhiteRoseSofia Maria QuinnNo ratings yet
- AMA Answers - ITE6102 - Computer Programming 1Document7 pagesAMA Answers - ITE6102 - Computer Programming 1Daniel Tom Chuy DarmNo ratings yet
- QCQI Exercise Solutions (Chapter 3)Document2 pagesQCQI Exercise Solutions (Chapter 3)sooraj sNo ratings yet
- P5 Maths CA1 Worksheet - Word Problems PT 1 PDFDocument10 pagesP5 Maths CA1 Worksheet - Word Problems PT 1 PDFmra100% (1)
- Maths Project PDF FDocument18 pagesMaths Project PDF FLakshayNo ratings yet
- Clusters and Semistable Models of Hyperelliptic Curves in The Wild CaseDocument84 pagesClusters and Semistable Models of Hyperelliptic Curves in The Wild CasenagiNo ratings yet
- CS 101 Assignment # 01: SolutionDocument3 pagesCS 101 Assignment # 01: SolutionNoori NoorNo ratings yet