You might also like
- Tour & Travel Management SystemDocument59 pagesTour & Travel Management Systemshravan95% (21)
- Vastu ShastraDocument36 pagesVastu ShastraAnjanaya Lamani0% (1)
- CSS - 05-Module 5.2 - Network Devices1Document6 pagesCSS - 05-Module 5.2 - Network Devices1Elixa HernandezNo ratings yet
- The Need For DigitizationDocument7 pagesThe Need For DigitizationMariza AgustinaNo ratings yet
- Understanding Synthetic Aperture Radar Images PDFDocument522 pagesUnderstanding Synthetic Aperture Radar Images PDFGaurav Singh100% (1)
- Support System Design of Power House and Transformer Caverns in DDocument5 pagesSupport System Design of Power House and Transformer Caverns in Dvikalp1982No ratings yet
- Physical Science Module 3Document22 pagesPhysical Science Module 3Florence-j Pelayo Tupaz100% (1)
- A Survey On "Multivariate Image Segmentation Using Semantic Region Growing With Adaptive Edge Penalty"Document4 pagesA Survey On "Multivariate Image Segmentation Using Semantic Region Growing With Adaptive Edge Penalty"Sanjay ShelarNo ratings yet
- Superpixel Segmentation Using Linear Spectral ClusteringDocument8 pagesSuperpixel Segmentation Using Linear Spectral ClusteringBela BNo ratings yet
- Plagiarism - ReportDocument11 pagesPlagiarism - ReportSanjay ShelarNo ratings yet
- cvpr2004 Keypoint Rahuls PDFDocument8 pagescvpr2004 Keypoint Rahuls PDFShabeeb Ali OruvangaraNo ratings yet
- Image Classification Using Wavelet Based Features For Image Retrieval ApplicationsDocument6 pagesImage Classification Using Wavelet Based Features For Image Retrieval ApplicationsVamsi KrishnaNo ratings yet
- Spherical Coding Algorithm For Wavelet Image CompressionDocument10 pagesSpherical Coding Algorithm For Wavelet Image CompressionSujeet KumarNo ratings yet
- Moving Toward Region-Based Image Segmentation Techniques: A StudyDocument7 pagesMoving Toward Region-Based Image Segmentation Techniques: A StudyDeepak MohanNo ratings yet
- MPEG-7 Based Spatial Shape Concealment Difficulty: Luis Ducla Soares, Fernando PereiraDocument5 pagesMPEG-7 Based Spatial Shape Concealment Difficulty: Luis Ducla Soares, Fernando PereiraMuthu Vijay DeepakNo ratings yet
- Berger 1986Document14 pagesBerger 1986Danilo AlexandreNo ratings yet
- Image Segmentation Based On Histogram Analysis and Soft ThresholdingDocument6 pagesImage Segmentation Based On Histogram Analysis and Soft ThresholdingSaeideh OraeiNo ratings yet
- Contour Detection and Hierarchical Image SegmentationDocument19 pagesContour Detection and Hierarchical Image SegmentationQuynhtrang NguyenNo ratings yet
- Self Organizing Networks (SON)Document6 pagesSelf Organizing Networks (SON)Yeshitila GetachewNo ratings yet
- SPSRDocument4 pagesSPSRVadim Koz Jr.No ratings yet
- Analysis of Modern Steganographic Techniques: Remya UnnikrishnanDocument4 pagesAnalysis of Modern Steganographic Techniques: Remya UnnikrishnanjyotsnaroopNo ratings yet
- Smart Camera Network Localization Using A 3D TargetDocument5 pagesSmart Camera Network Localization Using A 3D TargetEr Sahil UpadhyayNo ratings yet
- 01.13.hierarchical Model-Based Motion EstimationDocument16 pages01.13.hierarchical Model-Based Motion EstimationAlessioNo ratings yet
- Mixrl Data Mixing AugmentationDocument15 pagesMixrl Data Mixing AugmentationBeer BantNo ratings yet
- Robust Planar Target Tracking and Pose Estimation From A Single ConcavityDocument7 pagesRobust Planar Target Tracking and Pose Estimation From A Single ConcavitydharmithNo ratings yet
- Efficient Graph-Based Image SegmentationDocument15 pagesEfficient Graph-Based Image SegmentationrooocketmanNo ratings yet
- Content-Aware Image Compression With Convolutional Neural NetworksDocument9 pagesContent-Aware Image Compression With Convolutional Neural NetworksDmitry OryolNo ratings yet
- 0135 PDFDocument8 pages0135 PDFpepepe123jkghjkhNo ratings yet
- Digital Image Processing 3rd Edition 1 Trang 2Document266 pagesDigital Image Processing 3rd Edition 1 Trang 2Wolf InvisibleNo ratings yet
- Pfister ICRA06 2Document8 pagesPfister ICRA06 2shuhao zhangNo ratings yet
- Fast and Subpixel Precise Blob Detection and AttributionDocument4 pagesFast and Subpixel Precise Blob Detection and AttributionFelix FergosenNo ratings yet
- An Optimized Steganography Hiding Capacity and Imperceptibly Using Genetic AlgorithmsDocument13 pagesAn Optimized Steganography Hiding Capacity and Imperceptibly Using Genetic AlgorithmsSOHAILMAIDARGI NIENo ratings yet
- Discrete Topological Framework For Multiscale Segmentation ISPRS 2013Document6 pagesDiscrete Topological Framework For Multiscale Segmentation ISPRS 2013cosmoonlineNo ratings yet
- Image Segmentation: FemurDocument18 pagesImage Segmentation: FemurBoobalan RNo ratings yet
- SIFTDocument12 pagesSIFTragnoraffaele162No ratings yet
- Im High Quality Structure ICCV 2015 PaperDocument9 pagesIm High Quality Structure ICCV 2015 PaperGhazlan HishamNo ratings yet
- KamarajashastravidhiDocument13 pagesKamarajashastravidhials3No ratings yet
- PCB Exposure and Data Matrix Based Job Verification: Adam Marchewka, Ryszard Wocianiec, Jarosław ZdrojewskiDocument8 pagesPCB Exposure and Data Matrix Based Job Verification: Adam Marchewka, Ryszard Wocianiec, Jarosław ZdrojewskiShahrulJamalNo ratings yet
- Efficient Histogram For Region Based Image Retrieval in The Discrete Cosine Transform DomainDocument18 pagesEfficient Histogram For Region Based Image Retrieval in The Discrete Cosine Transform DomainIAES IJAINo ratings yet
- Sharp Feature Detection in Point Clouds: Abstract-This Paper Presents A New Technique ForDocument12 pagesSharp Feature Detection in Point Clouds: Abstract-This Paper Presents A New Technique ForGeorge CretulNo ratings yet
- Sarkar ACM MMSec 09 PDFDocument10 pagesSarkar ACM MMSec 09 PDFzgxfsbjbnNo ratings yet
- Learning Boundary Edges For 3d-Mesh Segmentation: (200y), Number Z, Pp. 1-12Document12 pagesLearning Boundary Edges For 3d-Mesh Segmentation: (200y), Number Z, Pp. 1-12Olabanji ShonibareNo ratings yet
- Ray TracingDocument10 pagesRay Tracingnaji1365No ratings yet
- Sparse Online Low-Rank Projection and Outlier Rejection (SOLO) For 3-D Rigid-Body Motion RegistrationDocument8 pagesSparse Online Low-Rank Projection and Outlier Rejection (SOLO) For 3-D Rigid-Body Motion RegistrationLuis SentisNo ratings yet
- Image RestorationDocument6 pagesImage RestorationNorzaliza BidinNo ratings yet
- IJETR031551Document6 pagesIJETR031551erpublicationNo ratings yet
- A Level Set Approach To Image Segmentation With Intensity InhomogeneityDocument12 pagesA Level Set Approach To Image Segmentation With Intensity InhomogeneityDr-Priyadarsan ParidaNo ratings yet
- 02.performance Evaluation of Watershed Segmentation Algorithm For Noisy and Noise Free Images Using Adaptive Thresholding and Masking MantapDocument5 pages02.performance Evaluation of Watershed Segmentation Algorithm For Noisy and Noise Free Images Using Adaptive Thresholding and Masking MantapbudiNo ratings yet
- Inscribed Approximation Based Adaptive Tessellation of Catmull-Clark Subdivision SurfacesDocument10 pagesInscribed Approximation Based Adaptive Tessellation of Catmull-Clark Subdivision Surfaces04352No ratings yet
- Color Image Segmentation Using Vector Quantization TechniquesDocument7 pagesColor Image Segmentation Using Vector Quantization Techniqueshbkekre2378No ratings yet
- Technical Seminar ReportDocument26 pagesTechnical Seminar ReportkrishanbharadwajvNo ratings yet
- Slicing 1Document7 pagesSlicing 1Brandon KohnNo ratings yet
- Submap-Based Bundle Adjustment For 3D Reconstruction From RGB-D DataDocument13 pagesSubmap-Based Bundle Adjustment For 3D Reconstruction From RGB-D DataZQQNo ratings yet
- Deformable Spatial Pyramid Matching For Fast Dense CorrespondencesDocument8 pagesDeformable Spatial Pyramid Matching For Fast Dense Correspondencessyed shahNo ratings yet
- Drastic Improvement of Change Detection Results With Multilook Complex SAR Images ApproachDocument13 pagesDrastic Improvement of Change Detection Results With Multilook Complex SAR Images Approachnaveen narulaNo ratings yet
- Fast Block LMS and RLS-Based Parameter Estimation and Two-Dimensional Imaging in Monostatic MIMO RADAR Systems With Multiple Mobile TargetsDocument16 pagesFast Block LMS and RLS-Based Parameter Estimation and Two-Dimensional Imaging in Monostatic MIMO RADAR Systems With Multiple Mobile TargetspratirajNo ratings yet
- Unified Blind Method For Multi-Image Super-Resolution and Single Multi-Image Blur DeconvolutionDocument14 pagesUnified Blind Method For Multi-Image Super-Resolution and Single Multi-Image Blur DeconvolutionSuman PatraNo ratings yet
- MLESAC: A New Robust Estimator With Application To Estimating Image GeometryDocument19 pagesMLESAC: A New Robust Estimator With Application To Estimating Image GeometryBoobalan DhanabalanNo ratings yet
- Pobeda 5Document4 pagesPobeda 5rpy084No ratings yet
- Koepfler, Lopez, Morel - 1994 - A Multi Scale Algorithm For Image Segmentation by Variational MethodDocument20 pagesKoepfler, Lopez, Morel - 1994 - A Multi Scale Algorithm For Image Segmentation by Variational Methodctusk1No ratings yet
- A Hybrid Optimization Algorithm For Low RCS Antenna Design: Wei SHAO, Xinyue ZHUDocument6 pagesA Hybrid Optimization Algorithm For Low RCS Antenna Design: Wei SHAO, Xinyue ZHUiamnbroneNo ratings yet
- Texture Segmentation Using LBP Embedded Region Competition: Xu Qing, Yang Jie, Ding SiyiDocument7 pagesTexture Segmentation Using LBP Embedded Region Competition: Xu Qing, Yang Jie, Ding SiyizhalanNo ratings yet
- Automatic Image Segmentation by Dynamic Region MergingDocument28 pagesAutomatic Image Segmentation by Dynamic Region MergingOnet GBNo ratings yet
- Image Resolution Enhancement Using Blind TechniqueDocument5 pagesImage Resolution Enhancement Using Blind TechniqueInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Real-Time Stereo Vision For Urban Traffic Scene UnderstandingDocument6 pagesReal-Time Stereo Vision For Urban Traffic Scene UnderstandingBasilNo ratings yet
- Radial Basis Networks: Fundamentals and Applications for The Activation Functions of Artificial Neural NetworksFrom EverandRadial Basis Networks: Fundamentals and Applications for The Activation Functions of Artificial Neural NetworksNo ratings yet
- Data ModelsDocument34 pagesData ModelsBăh ŢăraneeNo ratings yet
- (C) (D) Figure 6.5 Iterated Despeckled Version of Figure 6.1:8 Iterations of (A) CML and (B) CMAP and 200 Iterations of (C) CML and (D) CMARDocument19 pages(C) (D) Figure 6.5 Iterated Despeckled Version of Figure 6.1:8 Iterations of (A) CML and (B) CMAP and 200 Iterations of (C) CML and (D) CMARBăh ŢăraneeNo ratings yet
- 04 1Document25 pages04 1Băh ŢăraneeNo ratings yet
- Fundamental Properties of SAR ImagesDocument23 pagesFundamental Properties of SAR ImagesBăh ŢăraneeNo ratings yet
- Texture ExploatationDocument29 pagesTexture ExploatationBăh ŢăraneeNo ratings yet
- Elizabeth L. Simms (Author) - SAR Image Interpretation For Various Land Covers-A Practical Guide-CRC Press (2019)Document155 pagesElizabeth L. Simms (Author) - SAR Image Interpretation For Various Land Covers-A Practical Guide-CRC Press (2019)Băh ŢăraneeNo ratings yet
- Image Defects and Their CorrectionDocument31 pagesImage Defects and Their CorrectionBăh ŢăraneeNo ratings yet
- RCS Reconstruction FiltersDocument19 pagesRCS Reconstruction FiltersBăh ŢăraneeNo ratings yet
- Principles of SAR Images FormationDocument32 pagesPrinciples of SAR Images FormationBăh ŢăraneeNo ratings yet
- 00.1. Table of ContentsDocument10 pages00.1. Table of ContentsBăh ŢăraneeNo ratings yet
- Understanding Synthetic Aperture Radar Images: SciteghDocument15 pagesUnderstanding Synthetic Aperture Radar Images: SciteghBăh ŢăraneeNo ratings yet
- Summary of MATLAB Onramp: Basic SyntaxDocument3 pagesSummary of MATLAB Onramp: Basic SyntaxBăh ŢăraneeNo ratings yet
- Aperture Radar (SAR) Systems Carried On A Variety of Airborne and SpaceborneDocument9 pagesAperture Radar (SAR) Systems Carried On A Variety of Airborne and SpaceborneBăh ŢăraneeNo ratings yet
- SARHB FullResDocument307 pagesSARHB FullResOscar MekongoNo ratings yet
- Europeyan Foresty PDFDocument48 pagesEuropeyan Foresty PDFsanjana maliNo ratings yet
- Isprs Archives XLII 3 W8 491 2019Document5 pagesIsprs Archives XLII 3 W8 491 2019Băh ŢăraneeNo ratings yet
- 10 Automatic Detection of Forest Disturbance by SatelliteDocument2 pages10 Automatic Detection of Forest Disturbance by SatelliteBăh ŢăraneeNo ratings yet
- GeoCAD SECOND ANNOUNCEMENT 2022Document2 pagesGeoCAD SECOND ANNOUNCEMENT 2022Băh ŢăraneeNo ratings yet
- PRIMOFARO 24092019 LayoutedDocument84 pagesPRIMOFARO 24092019 LayoutedBăh ŢăraneeNo ratings yet
- Virginforest Romania SummaryDocument61 pagesVirginforest Romania SummaryMarian TudorNo ratings yet
- Demo Plan FinalDocument52 pagesDemo Plan FinalSk MadhukarNo ratings yet
- 2.4 GHZ 14 Dbi 90 Degree Vertical Polarized Sector Panel Wireless Lan Antenna - Model: Hg2414Sp-090Document2 pages2.4 GHZ 14 Dbi 90 Degree Vertical Polarized Sector Panel Wireless Lan Antenna - Model: Hg2414Sp-090Giovanni José Huacasi SupoNo ratings yet
- Química de CoordinacionDocument107 pagesQuímica de CoordinacionEMMANUEL ALEJANDRO FERNANDEZ GAVIRIANo ratings yet
- ECEA106L EXP1 MATLAB and Complex Numbers PDFDocument4 pagesECEA106L EXP1 MATLAB and Complex Numbers PDFRex Jose O. Bagain0% (1)
- Light: Year 9 Science Semester RevisionDocument4 pagesLight: Year 9 Science Semester Revisionapi-32133818No ratings yet
- Door SheetDocument9 pagesDoor SheetAnilkumarNo ratings yet
- Tutorial 6Document5 pagesTutorial 6Nixon GamingNo ratings yet
- A 1008 - A 1008M - 04 Qtewmdgvqtewmdhnlvjfra - PDFDocument9 pagesA 1008 - A 1008M - 04 Qtewmdgvqtewmdhnlvjfra - PDFMarcos Verissimo Juca de PaulaNo ratings yet
- Optimal Power Flow Considering System Security Using Loading FactorDocument4 pagesOptimal Power Flow Considering System Security Using Loading FactorNarendra YadavNo ratings yet
- Tips To Perform Pipette CalibrationDocument9 pagesTips To Perform Pipette CalibrationEdword SimpsonNo ratings yet
- North Wester 2019 Second TermDocument20 pagesNorth Wester 2019 Second TermTharuka AdikariNo ratings yet
- Control of Compressor Surge With Rotating Stall: Jan Van Helvoirt, Bram de Jager, Maarten SteinbuchDocument1 pageControl of Compressor Surge With Rotating Stall: Jan Van Helvoirt, Bram de Jager, Maarten Steinbuchinam vfNo ratings yet
- Low Shock Stage Separation System For Long Range Missile ApplicationDocument3 pagesLow Shock Stage Separation System For Long Range Missile ApplicationalexNo ratings yet
- Sae Summer KepsDocument6 pagesSae Summer KepsPritesh KumarNo ratings yet
- Rfid Ic List: Brand U H F Part Number Frequency Description RemarkDocument1 pageRfid Ic List: Brand U H F Part Number Frequency Description RemarkRamzi BenameurNo ratings yet
- 02-Continental Drift TheoryDocument22 pages02-Continental Drift Theoryapi-242405009No ratings yet
- Poster Presentation 3Document1 pagePoster Presentation 3Julien FaureNo ratings yet
- Lecture 5. Chemical Reaction (Part 2)Document38 pagesLecture 5. Chemical Reaction (Part 2)Dione Gale NavalNo ratings yet
- Lesson Plan Limits of AccuracyDocument1 pageLesson Plan Limits of AccuracyJonathan Robinson100% (2)
- Python Lab 1Document4 pagesPython Lab 1vaskoreNo ratings yet
- Rubrics Vital Signs TakingDocument6 pagesRubrics Vital Signs TakingRichard SluderNo ratings yet
- Elbi Vessel Data SheetDocument20 pagesElbi Vessel Data SheetMAZENNo ratings yet
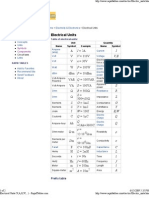
- Electrical UnitsDocument2 pagesElectrical Unitsevtoma100% (1)
- RFID VasuDocument22 pagesRFID Vasuapi-19984981No ratings yet