You might also like
- Midterm+Exam+Solution 2014Document9 pagesMidterm+Exam+Solution 2014Juaninho MedyNo ratings yet
- Escore de Rodwell CalculadoraDocument2 pagesEscore de Rodwell CalculadoracrismarlibarbosaNo ratings yet
- Nama: Novita Eka Yuliarni NIM: 30201604470: 1. Matriks (SM), Stiffness MatrixDocument26 pagesNama: Novita Eka Yuliarni NIM: 30201604470: 1. Matriks (SM), Stiffness Matrixdayat marzukiNo ratings yet
- Señal SísmicaDocument605 pagesSeñal SísmicaAlexander Solar AguilarNo ratings yet
- Lucrarea1 MN Ursu 3307Document13 pagesLucrarea1 MN Ursu 3307Ana IamandiNo ratings yet
- Tutorial Chapter 3 MemoDocument45 pagesTutorial Chapter 3 Memou20417242No ratings yet
- Matrix HWDocument25 pagesMatrix HWChristine Vel MarcianoNo ratings yet
- Tabla de Verdad: Cuantas Entradas de Informacion Hay en El Sistema 4Document4 pagesTabla de Verdad: Cuantas Entradas de Informacion Hay en El Sistema 4JESUS ALEJANDRO ABURTO MARTINEZNo ratings yet
- DIagrama Por BloquesDocument7 pagesDIagrama Por BloquesRamiro AmariNo ratings yet
- Ensayo Compresion Apoyo SimpleDocument91 pagesEnsayo Compresion Apoyo SimplejorgeNo ratings yet
- NUEVO LogueoDocument42 pagesNUEVO LogueoJuan Carlos OSNo ratings yet
- Supp 7 JDP 271115 PDFDocument4 pagesSupp 7 JDP 271115 PDFSascha KoenenNo ratings yet
- 5D - Richmon PribadiDocument124 pages5D - Richmon PribadiRichmon PribadiNo ratings yet
- Ejercicio de ExamenDocument12 pagesEjercicio de ExamenJose Jean Ramos SerranoNo ratings yet
- Table Klasifikasi Repot 27.12.2022Document1 pageTable Klasifikasi Repot 27.12.2022Faiz FauziNo ratings yet
- Ihsan Mustofa - Pertemuan 13Document1 pageIhsan Mustofa - Pertemuan 13Ihsan MustofaNo ratings yet
- Or - Assignment 2Document21 pagesOr - Assignment 2TalalNo ratings yet
- Spline Cubico de HermiteDocument2 pagesSpline Cubico de HermiteAmmy YugchaNo ratings yet
- Método de Las Fuerzas (Formulación Matricial)Document8 pagesMétodo de Las Fuerzas (Formulación Matricial)Guillermo Carranza CiezaNo ratings yet
- Calcula DoraDocument5 pagesCalcula DoraMaikon Lucian LenzNo ratings yet
- Auto Pengiraan Sisihan Piawai, Min, Varian, Population Dan Korelasi Linear Terutamanya Untuk Kajian Atau TesisDocument2 pagesAuto Pengiraan Sisihan Piawai, Min, Varian, Population Dan Korelasi Linear Terutamanya Untuk Kajian Atau Tesisbahiyah71No ratings yet
- Laporan Harian Pkm.....Document4 pagesLaporan Harian Pkm.....BudaNo ratings yet
- Matriz de CoeficientesDocument21 pagesMatriz de CoeficientesDANIEL ORTEGA LOPEZNo ratings yet
- M A R E T: Bulan BR - Abian Tengah TangebDocument12 pagesM A R E T: Bulan BR - Abian Tengah TangebMasgita PramiNo ratings yet
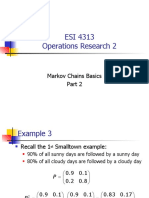
- ESI 4313 Operations Research 2: Markov Chains BasicsDocument45 pagesESI 4313 Operations Research 2: Markov Chains BasicsSaman_timNo ratings yet
- Jassia AssignmntDocument7 pagesJassia AssignmntSundas MehreenNo ratings yet
- Torikago: Darling in The Franxx EdDocument5 pagesTorikago: Darling in The Franxx EdMike LMNo ratings yet
- Machine Learing Linear System Class NotesDocument43 pagesMachine Learing Linear System Class Notesnaciobin17No ratings yet
- USP2 csQCA-compuadrianDocument8 pagesUSP2 csQCA-compuadrianAdrián AlbalaNo ratings yet
- A P R I L: Bulan BR - Abian Tengah TangebDocument12 pagesA P R I L: Bulan BR - Abian Tengah TangebMasgita PramiNo ratings yet
- WorkaaaDocument3 pagesWorkaaaTatiana MamaligaNo ratings yet
- Papa Kehte Hain: Guitar Tabs & ChordsDocument1 pagePapa Kehte Hain: Guitar Tabs & ChordsVishal INo ratings yet
- Subject Matrix - IV Sem GT - (A) - 2015-16 - SessionalDocument8 pagesSubject Matrix - IV Sem GT - (A) - 2015-16 - SessionalUdaysingh PatilNo ratings yet
- Space Frame ReportDocument21 pagesSpace Frame ReportWaseem Al OmariNo ratings yet
- Study IKI 30Document6 pagesStudy IKI 30Cristopher Sanhueza A. (C.S.A)No ratings yet
- PID ControlDocument116 pagesPID Controlu2051721No ratings yet
- Assignment SumDocument6 pagesAssignment SumAbirami SivakumarNo ratings yet
- Capacidad de Carga (General)Document68 pagesCapacidad de Carga (General)leoNo ratings yet
- Kuesioner Input DataDocument25 pagesKuesioner Input DataVivi Astuti Dwi WahyuniNo ratings yet
- TP StatistiquesDocument13 pagesTP StatistiqueszakaniNo ratings yet
- Ejercicios MarkovDocument81 pagesEjercicios Markovmedgonzahotmail.comNo ratings yet
- Porticos AnalisisDocument78 pagesPorticos AnalisisJhosep VargasNo ratings yet
- Estudo em Mi MenorDocument1 pageEstudo em Mi MenorGuto HazukiNo ratings yet
- 2.9. Items Arrive at A Machine Shop in A Deterministic Fashion at A Rate of One Per Minute. EachDocument4 pages2.9. Items Arrive at A Machine Shop in A Deterministic Fashion at A Rate of One Per Minute. EachAlbert GeraldiNo ratings yet
- Barras Longitud EA (K) : Calculamos La Matriz Transpuesta de Matriz de ContinuidadDocument21 pagesBarras Longitud EA (K) : Calculamos La Matriz Transpuesta de Matriz de ContinuidadEswin RumarioNo ratings yet
- Vals # 1: La Menor Hugo TeránDocument2 pagesVals # 1: La Menor Hugo Teránhugo teranNo ratings yet
- When The Saints Go Marchin' inDocument1 pageWhen The Saints Go Marchin' indgdgegweNo ratings yet
- Practica Analisis Estructural II-lara Chinchay Roberto CarlosDocument36 pagesPractica Analisis Estructural II-lara Chinchay Roberto CarlosRoberto Carlos Lara ChinchayNo ratings yet
- Interpretación de La FERR PDFDocument1 pageInterpretación de La FERR PDFANDRES SANTIAGO ULLOA MARTINEZNo ratings yet
- CFD MatrixDocument15 pagesCFD MatrixMUHAMMAD ASYRAAF BIN ANUARNo ratings yet
- Iur ConfigurationDocument146 pagesIur Configurationshawky_menisyNo ratings yet
- Libro 1Document1 pageLibro 1Edgar ArredondoNo ratings yet
- Man of The World NARUTO Shippuuden: Arranged and Performed by LonlonjpDocument3 pagesMan of The World NARUTO Shippuuden: Arranged and Performed by LonlonjpIndra AkashNo ratings yet
- Numerical Methods Machine Problem 1Document11 pagesNumerical Methods Machine Problem 1Maria Charlene Caraos TapiaNo ratings yet
- Armadura 001Document32 pagesArmadura 001Cristhiams AlarconNo ratings yet
- 4.1 Hasil Percobaan A. Percobaan PertamaDocument3 pages4.1 Hasil Percobaan A. Percobaan PertamaIbnu AsyifaNo ratings yet
- Armadura 001Document32 pagesArmadura 001Cristhiams AlarconNo ratings yet
- Armadura 001Document32 pagesArmadura 001Cristhiams AlarconNo ratings yet
- Midterm2Practice SolutionDocument10 pagesMidterm2Practice Solutionferdewes weslatiNo ratings yet
- Review 1Document83 pagesReview 1Keith wongNo ratings yet
- Angular Velocity - Rigid Body - Intuitive Approach: Sin - P - T - PDocument9 pagesAngular Velocity - Rigid Body - Intuitive Approach: Sin - P - T - PKeith wongNo ratings yet
- Chapter 2 Spatial Descriptions and TransformationsDocument99 pagesChapter 2 Spatial Descriptions and TransformationsKeith wongNo ratings yet
- Examples of Chpater 6Document30 pagesExamples of Chpater 6Keith wongNo ratings yet
- Solution: You Can Also Do As FollowsDocument9 pagesSolution: You Can Also Do As FollowsKeith wongNo ratings yet
- Mech4710 hw3 PDFDocument2 pagesMech4710 hw3 PDFKeith wongNo ratings yet
- Chapter 3 Manipulator KinematicsDocument101 pagesChapter 3 Manipulator KinematicsKeith wongNo ratings yet
- HW3 SolutionDocument5 pagesHW3 SolutionKeith wongNo ratings yet
- Chapter 4 Inverse Manipulator KinematicsDocument128 pagesChapter 4 Inverse Manipulator KinematicsKeith wongNo ratings yet
- Chapter 1 Introduction To RoboticsDocument64 pagesChapter 1 Introduction To RoboticsKeith wongNo ratings yet
- Examples of Chpater 2Document14 pagesExamples of Chpater 2Keith wongNo ratings yet
- ELEC3300 - 02 More About Embedded SystemsDocument38 pagesELEC3300 - 02 More About Embedded SystemsKeith wongNo ratings yet
- R R R R R R R R R R RR I: or (Using A Possible Euler Solution)Document5 pagesR R R R R R R R R R RR I: or (Using A Possible Euler Solution)Keith wongNo ratings yet
- ELEC3300 - 03-Basic Computer StructureDocument19 pagesELEC3300 - 03-Basic Computer StructureKeith wongNo ratings yet
- ELEC 3300 Introduction To Embedded Systems: Topic 5Document28 pagesELEC 3300 Introduction To Embedded Systems: Topic 5Keith wongNo ratings yet
- ELEC3300 - 01 Introduction To Embedded SystemsDocument28 pagesELEC3300 - 01 Introduction To Embedded SystemsKeith wongNo ratings yet
- ELEC3300 - 04-Embedded System StructureDocument47 pagesELEC3300 - 04-Embedded System StructureKeith wongNo ratings yet
- Elec 3300 - Cubemx: Department of Electronic and Computer Engineering Hkust by Wu Chi HangDocument26 pagesElec 3300 - Cubemx: Department of Electronic and Computer Engineering Hkust by Wu Chi HangKeith wongNo ratings yet
- Ficha Tecnica 74LS04 Compuerta NOTDocument2 pagesFicha Tecnica 74LS04 Compuerta NOTSteven BallardNo ratings yet
- ELEC 3300 Introduction To Embedded Systems: Course Introduction Prof. Vinod PrasadDocument34 pagesELEC 3300 Introduction To Embedded Systems: Course Introduction Prof. Vinod PrasadKeith wongNo ratings yet
- ELEC3300 06 InterruptDocument38 pagesELEC3300 06 InterruptKeith wongNo ratings yet
- ELEC 3300 Homework 1: Introduction To Keil MDK A. ObjectiveDocument18 pagesELEC 3300 Homework 1: Introduction To Keil MDK A. ObjectiveKeith wongNo ratings yet
- Analog 01 Lab Exp 08 FullDocument6 pagesAnalog 01 Lab Exp 08 FullShuvro Sankar SenNo ratings yet
- Session 7 - Beyond Tests - Alternatives in AssessmentDocument53 pagesSession 7 - Beyond Tests - Alternatives in AssessmenttrandinhgiabaoNo ratings yet
- PGDBA From MIT PuneDocument2 pagesPGDBA From MIT PuneMIT,PuneNo ratings yet
- Microsoft Excel - Class 1Document12 pagesMicrosoft Excel - Class 1Carllouie De LaraNo ratings yet
- Winone Elevator Connection DiagramDocument40 pagesWinone Elevator Connection DiagramMuhammad Rashid75% (4)
- TÀI LIỆU - Tính toán thông gió phòng máy động cơ (Engine room ventilation calculation)Document2 pagesTÀI LIỆU - Tính toán thông gió phòng máy động cơ (Engine room ventilation calculation)Thành TháiNo ratings yet
- Computing Test StatisticDocument8 pagesComputing Test StatisticFranklin BenitezNo ratings yet
- BEE MCQ Unit IVDocument16 pagesBEE MCQ Unit IVUmesh PatilNo ratings yet
- Hot Water Atmospheric BOILERDocument3 pagesHot Water Atmospheric BOILERcarlossandovalhdzNo ratings yet
- Sustainable Livelihood Security Index in A Developing Country: A Tool For Development PlanningDocument11 pagesSustainable Livelihood Security Index in A Developing Country: A Tool For Development PlanningTundeNo ratings yet
- Reference Manual - Model 6487 Picoammeter/Voltage SourceDocument338 pagesReference Manual - Model 6487 Picoammeter/Voltage SourceRanilson AngeloNo ratings yet
- Industrial Machines IiDocument26 pagesIndustrial Machines IiIsaac KimaruNo ratings yet
- Stsgroup 1Document13 pagesStsgroup 1Wenalyn Grace Abella LlavanNo ratings yet
- Principles of PaleontologyDocument10 pagesPrinciples of Paleontologyvitrinite50% (2)
- Nurs 624 Reference List ApaDocument4 pagesNurs 624 Reference List Apaapi-698538548No ratings yet
- Learning Based Exposition-The Simple Present TenseDocument12 pagesLearning Based Exposition-The Simple Present Tenseyuri Berrocal YanceNo ratings yet
- Deber Modelación de AguasDocument2 pagesDeber Modelación de AguasLiz VillamarNo ratings yet
- Sample Waste Management Tracking FormDocument3 pagesSample Waste Management Tracking FormSreekumarNo ratings yet
- CitiBank ApplicationDocument15 pagesCitiBank ApplicationJordan P HunterNo ratings yet
- Prelim MMW Lpu 2020 2021Document2 pagesPrelim MMW Lpu 2020 2021Noemi NadadoNo ratings yet
- Inside The Social Network's (Datacenter) NetworkDocument49 pagesInside The Social Network's (Datacenter) NetworkVamsi Krishna PatchamatlaNo ratings yet
- AccountingDocument45 pagesAccountingAfia ZaheenNo ratings yet
- Schlosser Distillation SSCHI 2011 256Document14 pagesSchlosser Distillation SSCHI 2011 256Brandon LizardoNo ratings yet
- 2020 DecDocument61 pages2020 DecLokeshNo ratings yet
- Qualities of A Good PresenterDocument2 pagesQualities of A Good PresenterMuhammad Umair KhanNo ratings yet
- Score Fusion of Finger Vein and Face For Human Recognition Based On Convolutional Neural Network ModelDocument9 pagesScore Fusion of Finger Vein and Face For Human Recognition Based On Convolutional Neural Network ModelFressy NugrohoNo ratings yet
- CompanyDocument7 pagesCompanylotchanNo ratings yet
- Egs630-6 Komatsu GensetDocument2 pagesEgs630-6 Komatsu GensetimamfadiliNo ratings yet
- Standard Operating Procedure For Clinical Biochemistry: R. K. Life Services Private LimitedDocument7 pagesStandard Operating Procedure For Clinical Biochemistry: R. K. Life Services Private LimitedAniruddha ChatterjeeNo ratings yet
- Job Evaluation & Grading - PPT Hrm2Document9 pagesJob Evaluation & Grading - PPT Hrm2Monica ReyesNo ratings yet