You might also like
- Induction Motor Braking Using Discrete Frequency ControlDocument3 pagesInduction Motor Braking Using Discrete Frequency Controlafshin keshtkarNo ratings yet
- Unit 7electric TractionDocument35 pagesUnit 7electric TractionVinod KohliNo ratings yet
- Considerations in Medium Voltage Reduced Voltage Motor Starting PDFDocument7 pagesConsiderations in Medium Voltage Reduced Voltage Motor Starting PDFyaoNo ratings yet
- Power Factor Improvement of Induction Motor by Using CapacitorsDocument5 pagesPower Factor Improvement of Induction Motor by Using CapacitorsARUNPRASADEEENo ratings yet
- Islam 2016Document6 pagesIslam 2016Md. Mustafa ZavedNo ratings yet
- Unit-4-Electrical Machines: Lecture-3 Starting methods of 3-Φ Induction MotorDocument13 pagesUnit-4-Electrical Machines: Lecture-3 Starting methods of 3-Φ Induction MotorPratik SarkarNo ratings yet
- Optimization 5 × 195 KW Chiller Compressor Motor With ETAPDocument8 pagesOptimization 5 × 195 KW Chiller Compressor Motor With ETAP陆华林No ratings yet
- Starting Time Calculation For Induction Motor 2332 0796 1000136Document4 pagesStarting Time Calculation For Induction Motor 2332 0796 1000136Bhavik PrajapatiNo ratings yet
- Relay and Timer Based Automatic Star-Delta StarterDocument3 pagesRelay and Timer Based Automatic Star-Delta StarterInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Common Electrical Engineering Interview Questions Asked in PSU InterviewsDocument7 pagesCommon Electrical Engineering Interview Questions Asked in PSU Interviewsrishabh100% (1)
- Drive Technologies: Stepping Motor DrivesDocument6 pagesDrive Technologies: Stepping Motor DriveseemylNo ratings yet
- Hasa 8Document2 pagesHasa 8dhfujfhxbxhfjfjjfjfjfNo ratings yet
- Speed Control of 3-Phase Induction Motor Using Volt/hertz Control For Automotive ApplicationDocument6 pagesSpeed Control of 3-Phase Induction Motor Using Volt/hertz Control For Automotive ApplicationAlemneh TechiloNo ratings yet
- Selection of CapacitorsDocument9 pagesSelection of CapacitorsbatchurajaNo ratings yet
- Newsletter Specifier Short Circ Motor Contrib 8-09-10 PDFDocument2 pagesNewsletter Specifier Short Circ Motor Contrib 8-09-10 PDFIsagani MadridNo ratings yet
- Ijett V4i7p138 PDFDocument5 pagesIjett V4i7p138 PDFDESMAN SINAGANo ratings yet
- Unit-IV Speed Control of Induction Motor On Rotor SideDocument8 pagesUnit-IV Speed Control of Induction Motor On Rotor SideMohammed MateenNo ratings yet
- The Installation of AC Drives Can Yield Some Predictable Benefits and Some Not-So-Predictable Side EffectsDocument3 pagesThe Installation of AC Drives Can Yield Some Predictable Benefits and Some Not-So-Predictable Side EffectsJonathan SantiagoNo ratings yet
- 3-Phase Ac Motor Monitoring and Parameter Calculation Using Labview and DaqDocument13 pages3-Phase Ac Motor Monitoring and Parameter Calculation Using Labview and DaqInternational Journal of computational Engineering research (IJCER)No ratings yet
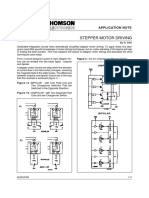
- Stepper Motor Driving: Application NoteDocument17 pagesStepper Motor Driving: Application NoteGonzalo RiosNo ratings yet
- Stepper Motor Driving: Application NoteDocument17 pagesStepper Motor Driving: Application NoteGonzalo RiosNo ratings yet
- Modes of Operation of Stepper MotorDocument17 pagesModes of Operation of Stepper MotorSoumik GhoshNo ratings yet
- Ijarcce 16Document3 pagesIjarcce 16Black MambaNo ratings yet
- Induction Motor.Document6 pagesInduction Motor.Kiran KumarNo ratings yet
- Final Project Regenerative BrakingDocument6 pagesFinal Project Regenerative Brakingdims irifiyinNo ratings yet
- 3-Phase Ac Motor Monitoring and Parameter Calculation Using Labview and DaqDocument13 pages3-Phase Ac Motor Monitoring and Parameter Calculation Using Labview and DaqahmetNo ratings yet
- Unit Ii Electrical Machines For Renewable Energy Conversion: Part-ADocument5 pagesUnit Ii Electrical Machines For Renewable Energy Conversion: Part-AsowmyaNo ratings yet
- Benzen-2008-IEEE-ICSET Z-Source Inverter Based Wind Power Generation PDFDocument5 pagesBenzen-2008-IEEE-ICSET Z-Source Inverter Based Wind Power Generation PDFAnoop MathewNo ratings yet
- Speed Control of 3-Phase Induction Motor Using Volt/hertz Control For Automotive ApplicationDocument6 pagesSpeed Control of 3-Phase Induction Motor Using Volt/hertz Control For Automotive ApplicationPrabhat KarnNo ratings yet
- The Design of DC Motor Driver For Solar Tracking ApplicationsDocument4 pagesThe Design of DC Motor Driver For Solar Tracking ApplicationsНеМаЊаA JovicicNo ratings yet
- Khodapanah2018 Article EstimatingPowerFactorOfInductiDocument10 pagesKhodapanah2018 Article EstimatingPowerFactorOfInductiodracirggNo ratings yet
- 5695 45 165 DC Motor Speed Control Using Magnetic AmplifierDocument8 pages5695 45 165 DC Motor Speed Control Using Magnetic AmplifierNexus GoddNo ratings yet
- SC MotorDocument2 pagesSC MotorMehdi_Mashayekhi_172No ratings yet
- 8.13 Compound Generator: F F Res F F Crit FDocument3 pages8.13 Compound Generator: F F Res F F Crit FAum4Eng HelpNo ratings yet
- EE8601 UNIT 3 Closed Loop ControlDocument18 pagesEE8601 UNIT 3 Closed Loop Controlaruna4791No ratings yet
- Ginart 1999Document7 pagesGinart 1999Maximo La Vida ContinuaNo ratings yet
- Starting Time Calculation For Induction Motor.: Abhishek Garg, Arun Singh TomarDocument5 pagesStarting Time Calculation For Induction Motor.: Abhishek Garg, Arun Singh TomarBhavik PrajapatiNo ratings yet
- Clutches and Fluid Drive Couplings 1633017788Document36 pagesClutches and Fluid Drive Couplings 1633017788cemekaobiNo ratings yet
- Effect of Change in Frequency On Operation and Performance of Three Phase Induction MotorDocument4 pagesEffect of Change in Frequency On Operation and Performance of Three Phase Induction MotorIDES100% (1)
- Induction Generator - 100255KDocument25 pagesInduction Generator - 100255KChamath Kirinde100% (1)
- Evaluating Motor and Transformer Inrush CurrentsDocument4 pagesEvaluating Motor and Transformer Inrush CurrentsMind of BeautyNo ratings yet
- Hybrid Wind Diesel Energy System Using Matlab Simulation: ISO 9001:2008 CertifiedDocument9 pagesHybrid Wind Diesel Energy System Using Matlab Simulation: ISO 9001:2008 Certifiedsatya_vanapalli3422No ratings yet
- AC Drives and Soft Starter Application Guide - AllenBradleyCoDocument5 pagesAC Drives and Soft Starter Application Guide - AllenBradleyCojoyama100% (1)
- AC-machine With Frequency Converter With Immunity To Voltage DipsDocument5 pagesAC-machine With Frequency Converter With Immunity To Voltage DipsНебојша МитровићNo ratings yet
- Topic - 8 - Speed Control of Induction MotorsDocument26 pagesTopic - 8 - Speed Control of Induction Motorsdillon deonathNo ratings yet
- A Simple Flywheel Induction Motor For Large Power Short Time Compensation in Inverter-Driven Stand-Alone Power SystemsDocument7 pagesA Simple Flywheel Induction Motor For Large Power Short Time Compensation in Inverter-Driven Stand-Alone Power SystemstalatsonNo ratings yet
- Reverse PowerDocument6 pagesReverse PowerEdward DineshNo ratings yet
- Implementation of A Portable Micro Hydro Power Plant Using An Induction Generator ControllerDocument4 pagesImplementation of A Portable Micro Hydro Power Plant Using An Induction Generator ControllerSachinth Nalinda SilvaNo ratings yet
- How Much Watts Solar Panel We Need For Our Home Electrical Appliances?Document6 pagesHow Much Watts Solar Panel We Need For Our Home Electrical Appliances?SovanNo ratings yet
- Driving DC Motors-CD00003791Document7 pagesDriving DC Motors-CD00003791Dan EsentherNo ratings yet
- Power Electronics Application in DC Motor Drives - Case Study - ss03595 - Sarwan Shah PDFDocument6 pagesPower Electronics Application in DC Motor Drives - Case Study - ss03595 - Sarwan Shah PDFMehdi Raza KhorasaniNo ratings yet
- Power Factor Improvement of Induction Motor by Using Capacitors AbstractDocument3 pagesPower Factor Improvement of Induction Motor by Using Capacitors AbstractG DamarakeswarNo ratings yet
- Different Braking Techniques Employed To A Brushless DC Motor Drive Used in LocomotivesDocument7 pagesDifferent Braking Techniques Employed To A Brushless DC Motor Drive Used in LocomotivesKidus DawitNo ratings yet
- PK Reverse Power Flow Protection of Generator PaperDocument4 pagesPK Reverse Power Flow Protection of Generator PaperTushar BehalpadeNo ratings yet
- STARTING-induction MotorsDocument9 pagesSTARTING-induction MotorsSolomon NyekoNo ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
- Rich Gen ChemDocument4 pagesRich Gen ChemRaymond MaristelaNo ratings yet
- CompanyDocument226 pagesCompanyMohamed SaeedNo ratings yet
- PRE-MID TERM EXAM (2022 - 23) Subject: Science Class: X Time: 1Hr30Min M.M - 40Document6 pagesPRE-MID TERM EXAM (2022 - 23) Subject: Science Class: X Time: 1Hr30Min M.M - 40VatsalyaNo ratings yet
- Chapter 5Document39 pagesChapter 5Pink FloydaNo ratings yet
- AERO213: Aeroengines: AERO213 School of Engineering DR David JC DennisDocument9 pagesAERO213: Aeroengines: AERO213 School of Engineering DR David JC DennisAhmed ElgamalNo ratings yet
- Accomplishment Report Yes oDocument4 pagesAccomplishment Report Yes oJoan DalilisNo ratings yet
- PSC Deficiencies List - China - 6 Month TrendDocument22 pagesPSC Deficiencies List - China - 6 Month TrendOm Prakash Raj100% (3)
- Hayate 115 ManualDocument72 pagesHayate 115 ManualMateo AgudeloNo ratings yet
- Mec-A5/100c Horizontal PumpDocument2 pagesMec-A5/100c Horizontal Pumpdragos manoleNo ratings yet
- Boq Assessment TrafoDocument2 pagesBoq Assessment TrafoWahyu HidayatNo ratings yet
- Bat-Dwg-Dd-Me-00-Eg-6101 - R0 - Grounding, Earthing and Lightning Protection System Shematic DiagramDocument1 pageBat-Dwg-Dd-Me-00-Eg-6101 - R0 - Grounding, Earthing and Lightning Protection System Shematic DiagramCosphiiiNo ratings yet
- Building A New Community Hall: ProjectDocument24 pagesBuilding A New Community Hall: ProjectpriyankNo ratings yet
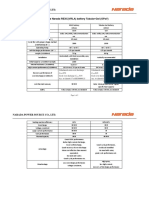
- Narada Power Source Co., LTD.: Item Rexc Battery (Vrla) Tubular-Gel Battery (Opzv)Document2 pagesNarada Power Source Co., LTD.: Item Rexc Battery (Vrla) Tubular-Gel Battery (Opzv)Yongki Adi Pratama PutraNo ratings yet
- 2 Energy Efficient Techniques For APHDocument46 pages2 Energy Efficient Techniques For APHMahesh MishraNo ratings yet
- SG105306BEN A07 Brochure Circuit-breaker-DC UR26 02.21-3Document12 pagesSG105306BEN A07 Brochure Circuit-breaker-DC UR26 02.21-3DoomNo ratings yet
- Green Roof 2021-S1Document39 pagesGreen Roof 2021-S1Dimas Kharizmi Albar IPBNo ratings yet
- Training Book - 950 LoadersDocument248 pagesTraining Book - 950 LoadersSandeep Nikhil100% (3)
- Earth Science For Stem: Quarter 1 - Module 13: Different Types of WasteDocument27 pagesEarth Science For Stem: Quarter 1 - Module 13: Different Types of WasteKrisburt Delos SantosNo ratings yet
- A.O. Smith Del 6 Den 52 O&m ManualDocument24 pagesA.O. Smith Del 6 Den 52 O&m ManualJonalou ArominNo ratings yet
- ENDURA LED WELL GLASS BY201 (70w)Document11 pagesENDURA LED WELL GLASS BY201 (70w)Abhishek KumarNo ratings yet
- Explosion Proof Motor Classifications NEMADocument1 pageExplosion Proof Motor Classifications NEMANyein KoNo ratings yet
- Kyoto Protocol UPSC NotesDocument3 pagesKyoto Protocol UPSC NotespremNo ratings yet
- Studentbook AnswerKey - Advanced 3Document27 pagesStudentbook AnswerKey - Advanced 3Erica YamNo ratings yet
- A Review of Front End AC-DC Topologies in Universal Battery Charger For Electric TransportationDocument6 pagesA Review of Front End AC-DC Topologies in Universal Battery Charger For Electric TransportationShayan AhmedNo ratings yet
- 1.0 Morales 2021Document15 pages1.0 Morales 2021Bandita DashNo ratings yet
- Power Factor CorrectionDocument11 pagesPower Factor Correctionwramadhani65No ratings yet
- Natron BlueTray 4000 V3.0 - User's Manual v1.4-07272020Document18 pagesNatron BlueTray 4000 V3.0 - User's Manual v1.4-07272020Ayan PownNo ratings yet
- Magnetic Effect of Electric Current Class 10 Science Extra Questions With AnswersDocument9 pagesMagnetic Effect of Electric Current Class 10 Science Extra Questions With AnswersGurinder SinghNo ratings yet
- Presentacion FMS enDocument78 pagesPresentacion FMS enRicardo LimaNo ratings yet
- r56 Dme Failure Question - Mini Cooper ForumDocument9 pagesr56 Dme Failure Question - Mini Cooper Forumjohn larson100% (1)