You might also like
- DupaDocument43 pagesDupaKamil MarciniakNo ratings yet
- Thesis Process MiningDocument98 pagesThesis Process MiningRamyapremnathNo ratings yet
- Itaagi Conas Bss - PhysicsDocument55 pagesItaagi Conas Bss - PhysicsFaizan AhmadNo ratings yet
- Web Application ScanningDocument57 pagesWeb Application ScanningMuhammad HussainNo ratings yet
- Final - Report - 06 10 2016 PDFDocument30 pagesFinal - Report - 06 10 2016 PDFShishir PatilNo ratings yet
- React Native ReportDocument65 pagesReact Native ReportFocDevsNo ratings yet
- FULLTEXT01Document114 pagesFULLTEXT01Văn Điệp PhạmNo ratings yet
- FULLTEXT01Document45 pagesFULLTEXT01Faiza Tabassam 546-FET/BSEE/F19No ratings yet
- Data Over DAB For PublicationDocument91 pagesData Over DAB For PublicationS W DunlevyNo ratings yet
- Bell Proj PDFDocument69 pagesBell Proj PDFnephopNo ratings yet
- ArturasDocument21 pagesArturasArtūras SotničenkoNo ratings yet
- Inteligencia Artificial para Videojuegos Con Deep Reinf Molina Garcia AlvaroDocument67 pagesInteligencia Artificial para Videojuegos Con Deep Reinf Molina Garcia AlvaroDIEGO ARMANDO TRUJILLO LOSADANo ratings yet
- User-Designed Background Tasks in App InventorDocument70 pagesUser-Designed Background Tasks in App InventorQuac HacNo ratings yet
- Conveyor Belt Based Pick and Sort Industrial Robotics ApplicationDocument75 pagesConveyor Belt Based Pick and Sort Industrial Robotics ApplicationUday KumarNo ratings yet
- 2.thesis DashboardDocument90 pages2.thesis DashboardBUDIYONO SOBATGURUNNo ratings yet
- Video Conferencing - User Interface With A Remote Control For TV-setsDocument84 pagesVideo Conferencing - User Interface With A Remote Control For TV-setsJugJyoti BorGohainNo ratings yet
- Top-Down Method at Work in Analog IC DesignDocument180 pagesTop-Down Method at Work in Analog IC DesignregggNo ratings yet
- TFG Draft 6Document53 pagesTFG Draft 6Ana Ramatulai Djalo DjaloNo ratings yet
- Internship ReportDocument27 pagesInternship ReportFedi AbdenbiNo ratings yet
- Offensive Technologies: Attacking Android's Pattern & PIN LockDocument23 pagesOffensive Technologies: Attacking Android's Pattern & PIN LockjakiniNo ratings yet
- Jonathan Attard FYP2023Document77 pagesJonathan Attard FYP2023David Cachia EnriquezNo ratings yet
- Project RoineDocument35 pagesProject RoineKaustubh GhadiNo ratings yet
- Qfin CPPDocument67 pagesQfin CPPgauravroongtaNo ratings yet
- E Marketing WebsiteDocument43 pagesE Marketing WebsiteS SERIES MUSICNo ratings yet
- Emotion Recognition Using Facial Expressions PDFDocument26 pagesEmotion Recognition Using Facial Expressions PDFNowreen HaqueNo ratings yet
- ThesisDocument101 pagesThesisDenys SmetaniakNo ratings yet
- Simulation With 3DEXPERIENCE: Evaluation of Software For Production Flow Simulation in Manufacturing IndustryDocument81 pagesSimulation With 3DEXPERIENCE: Evaluation of Software For Production Flow Simulation in Manufacturing Industryhassan eijyNo ratings yet
- Appointment and Workload Management SystemDocument50 pagesAppointment and Workload Management Systemprueba222222No ratings yet
- Ug4 ProjDocument77 pagesUg4 ProjHimansu Sekhar PradhanNo ratings yet
- Enhancing Face Recognition by Image Warping: Jorge Garcia BuenoDocument220 pagesEnhancing Face Recognition by Image Warping: Jorge Garcia BuenoBang VoanhNo ratings yet
- Documentation Industrial TraingDocument30 pagesDocumentation Industrial TraingABHIRAJ MISHRANo ratings yet
- KAI: An AI-powered Chatbot To Support Therapy: Bachelor Thesis Project Specilization in Computer ScienceDocument63 pagesKAI: An AI-powered Chatbot To Support Therapy: Bachelor Thesis Project Specilization in Computer ScienceAna Ramatulai Djalo DjaloNo ratings yet
- Location Detection Over Social MediaDocument35 pagesLocation Detection Over Social MediaAnonymous qqxHaONo ratings yet
- Rapport PFEDocument69 pagesRapport PFEAyoub Chefai100% (2)
- Introduction To Data ScienceDocument200 pagesIntroduction To Data ScienceEralda FRROKUNo ratings yet
- Technical DocumentationDocument14 pagesTechnical DocumentationJacer SmatNo ratings yet
- Project ReportDocument37 pagesProject ReportJoy SrkrNo ratings yet
- Web-Based Real-Time Information Dashboard: Vincent Andersson Martin HesslundDocument64 pagesWeb-Based Real-Time Information Dashboard: Vincent Andersson Martin Hesslundgeldartz fairyNo ratings yet
- Practical Hierarchical Reinforcement LeaDocument88 pagesPractical Hierarchical Reinforcement LeaJuan Ignacio FrancoNo ratings yet
- Table Tech: Final Project ReportDocument34 pagesTable Tech: Final Project ReportRosa Micaela SerraNo ratings yet
- Rocker Bogie AssignmentDocument41 pagesRocker Bogie AssignmentBowmigowNo ratings yet
- Project Proposal 260 CopyDocument38 pagesProject Proposal 260 CopyBorshonNo ratings yet
- Robot Based 3D Scanning and Recognition of Workpieces: International Master's ThesisDocument83 pagesRobot Based 3D Scanning and Recognition of Workpieces: International Master's ThesisDennisRonaldiNo ratings yet
- Estimating P-Values For Outlier Detection: Master's Programme in Embedded and Intelligent Systems, 120 CreditsDocument117 pagesEstimating P-Values For Outlier Detection: Master's Programme in Embedded and Intelligent Systems, 120 CreditsPioNo ratings yet
- Antonio Manuel Pereira Do AnjoDocument121 pagesAntonio Manuel Pereira Do AnjoFernanda NascimentoNo ratings yet
- Kirkvik Acit2022Document155 pagesKirkvik Acit2022MageshNo ratings yet
- Ascertaining Polarity of Public Opinions On Bangladesh Cricket Through Sentiment AnalysisDocument51 pagesAscertaining Polarity of Public Opinions On Bangladesh Cricket Through Sentiment AnalysisArman AbdullahNo ratings yet
- An Anthropomorphic Bipedal RobotDocument71 pagesAn Anthropomorphic Bipedal RobotLuis Calderón RugelesNo ratings yet
- Jmetal 4.5 User Manual: Antonio J. Nebro, Juan J. DurilloDocument88 pagesJmetal 4.5 User Manual: Antonio J. Nebro, Juan J. DurilloFranklinNo ratings yet
- Simulation and Visualization of A 3D Biological Environment. Dna and Restriction Enzyme Case StudyDocument102 pagesSimulation and Visualization of A 3D Biological Environment. Dna and Restriction Enzyme Case Studyrocinante73No ratings yet
- InVEST 2.2.2 DocumentationDocument324 pagesInVEST 2.2.2 Documentationorhun88No ratings yet
- ?UTF-8?Q?CSE 20-98 Lindberg So CC 88derberg - PDF?Document100 pages?UTF-8?Q?CSE 20-98 Lindberg So CC 88derberg - PDF?Fran MoralesNo ratings yet
- Project Report SDocument24 pagesProject Report SVEDANT KALIANo ratings yet
- Hechth DpathDocument96 pagesHechth Dpathedfewf3No ratings yet
- 1905.13750 Sketch2code Generating A Website From A PaperDocument64 pages1905.13750 Sketch2code Generating A Website From A PaperPawelek17No ratings yet
- Fulltext02 PDFDocument66 pagesFulltext02 PDFZappYNo ratings yet
- g3 Survey Resp Web DesignDocument38 pagesg3 Survey Resp Web DesignMerenissa BalatoNo ratings yet
- Designing A Multiplayer Game For Inflight EnteDocument148 pagesDesigning A Multiplayer Game For Inflight Enteahmet barış saraçNo ratings yet
- Repay - Revamping The Reimbursement ProcessDocument66 pagesRepay - Revamping The Reimbursement ProcessEgi GundariNo ratings yet
- Aindumps.1z0 888.v2018!11!26.by - Brian.43qDocument32 pagesAindumps.1z0 888.v2018!11!26.by - Brian.43qRkNo ratings yet
- Accessing Vcenter ServerDocument40 pagesAccessing Vcenter ServerNemoNo ratings yet
- The Quill (And AdventureWriter) Ref GuideDocument38 pagesThe Quill (And AdventureWriter) Ref GuideNachoAndrésLlorenteNo ratings yet
- Implementing Cisco Service Provider Next-Generation Core Network ServicesDocument9 pagesImplementing Cisco Service Provider Next-Generation Core Network ServicesPak ChannNo ratings yet
- Computational Thinking Algorithms and ProgrammingDocument43 pagesComputational Thinking Algorithms and ProgrammingCatalina ParNo ratings yet
- AM335x Android eMMC Booting - Texas Instruments WikiDocument8 pagesAM335x Android eMMC Booting - Texas Instruments Wikidevesh.ehrenNo ratings yet
- 2019 Brown CS - A Half-Century of HypertextDocument18 pages2019 Brown CS - A Half-Century of HypertextHypnosNo ratings yet
- Cesar RomeroDocument3 pagesCesar RomeroMarceloMoreiraCunhaNo ratings yet
- Aplus Interface Documentation Modbus TCPDocument31 pagesAplus Interface Documentation Modbus TCPVladimirNo ratings yet
- MCx201 ReadParameterDocument5 pagesMCx201 ReadParameterJosephNo ratings yet
- VFP Tutorial - Micorsoft Visual FoxproDocument46 pagesVFP Tutorial - Micorsoft Visual FoxproLino CuestaNo ratings yet
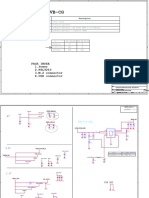
- RTL9210-VB-CG Demo V203 PDFDocument5 pagesRTL9210-VB-CG Demo V203 PDFCenusa MihaiNo ratings yet
- Basic PC Shortcut KeysDocument6 pagesBasic PC Shortcut KeysmuthukumartharaniNo ratings yet
- C Port 3600 Data SheetDocument2 pagesC Port 3600 Data SheetSenthooran SrikandarajNo ratings yet
- Picasa: Software Requirement SpecificationDocument20 pagesPicasa: Software Requirement SpecificationSai KiranNo ratings yet
- CS304 Solved Quizs Before Mid Collection by Arslan Ali: CompositionDocument29 pagesCS304 Solved Quizs Before Mid Collection by Arslan Ali: CompositionZeeshan IjazNo ratings yet
- DS Diskeeper18Document2 pagesDS Diskeeper18A JosephNo ratings yet
- Pa 10 Display HR Personnel FileDocument5 pagesPa 10 Display HR Personnel FileBrian GriffithNo ratings yet
- Changing OverclockingDocument7 pagesChanging Overclockingmario_gNo ratings yet
- Chapter 2 Data ManipulationDocument42 pagesChapter 2 Data ManipulationRidoy zzamanNo ratings yet
- Real Time Clock (RTC) : Technical Data SheetDocument9 pagesReal Time Clock (RTC) : Technical Data SheetSaratchand AnnamNo ratings yet
- SITC (SCL) - VT-MM-06E Yokogawa Standard Antivirus Software Procedure (ENS) ...Document65 pagesSITC (SCL) - VT-MM-06E Yokogawa Standard Antivirus Software Procedure (ENS) ...VadimNo ratings yet
- Name: Najma Said Salad Faculty: Computer Science Semester: OneDocument2 pagesName: Najma Said Salad Faculty: Computer Science Semester: OneAbdifatah SaidNo ratings yet
- Show My CodeDocument172 pagesShow My CodeTomas IsdalNo ratings yet
- Computer Class: Microsoft Word, Excel and Power PointDocument32 pagesComputer Class: Microsoft Word, Excel and Power Pointnangnyeinnyein eiNo ratings yet
- Automated Hardware Testing Using PythonDocument31 pagesAutomated Hardware Testing Using PythonYuvaraja100% (1)
- Duino-Coin MemulaiDocument23 pagesDuino-Coin Memulaiwayan danzoNo ratings yet
- Regalo At5Document6 pagesRegalo At5yra combalicerNo ratings yet
- Digital CodesDocument15 pagesDigital CodesBijay MishraNo ratings yet
- Electrical Part List A217 A21sDocument12 pagesElectrical Part List A217 A21ssusanoyopmail100% (1)