You might also like
- 4S Conference Paper PDFDocument7 pages4S Conference Paper PDFMarcAlomarPayerasNo ratings yet
- c2 PDFDocument48 pagesc2 PDFSantiago UrgilesNo ratings yet
- Tim Girard Resume 8 2013Document3 pagesTim Girard Resume 8 2013sundar_subash25No ratings yet
- EntrySat CubeSat to Study Atmospheric Re-EntryDocument7 pagesEntrySat CubeSat to Study Atmospheric Re-Entrymarcalomar19No ratings yet
- In-FEEP Qualification Test Program For LISA PathfinderDocument8 pagesIn-FEEP Qualification Test Program For LISA PathfinderJohn DoeNo ratings yet
- 1 DS1 Mission Design and Technologies ValidationDocument8 pages1 DS1 Mission Design and Technologies ValidationRocco IbhNo ratings yet
- Applications of Optical Fiber - Melanie N. Ott PDFDocument13 pagesApplications of Optical Fiber - Melanie N. Ott PDFAhmed M H Al-YousifNo ratings yet
- Thermal Design of The Mars Science Laboratory Powered Descent VehicleDocument18 pagesThermal Design of The Mars Science Laboratory Powered Descent Vehicle枪手瞎炳No ratings yet
- Inflatable Antenna Technology With Preliminary ShuDocument7 pagesInflatable Antenna Technology With Preliminary ShudivyaNo ratings yet
- 1067.pdf Eighth International Conference On Mars (2014) : Telescope Characteristics. A Trade-Off Exists BeDocument2 pages1067.pdf Eighth International Conference On Mars (2014) : Telescope Characteristics. A Trade-Off Exists BeJunior MirandaNo ratings yet
- ST7-DRS Colloid Thruster System Development and Performance SummaryDocument32 pagesST7-DRS Colloid Thruster System Development and Performance SummaryJohn DoeNo ratings yet
- Acta Astronautica: SciencedirectDocument14 pagesActa Astronautica: SciencedirectRobinson 10K10No ratings yet
- Misión 2-IAC2010-S16-1-Nanosatellite-tracking-F-PranajayaDocument9 pagesMisión 2-IAC2010-S16-1-Nanosatellite-tracking-F-Pranajayayubrany gonzalezNo ratings yet
- CALIPSO Lidar Description and Performance Assessment: OlumeDocument15 pagesCALIPSO Lidar Description and Performance Assessment: Olumebitconcepts9781No ratings yet
- Microsystems, Instrument Electronics, and Mobile Sensor PlatformsDocument8 pagesMicrosystems, Instrument Electronics, and Mobile Sensor PlatformsShajahan ShagulNo ratings yet
- Cubesat Deformable Mirror Demonstration: CitationDocument12 pagesCubesat Deformable Mirror Demonstration: CitationjonNo ratings yet
- Electric Propulsion Research and Development at Nasa George SchmidtDocument9 pagesElectric Propulsion Research and Development at Nasa George SchmidtShubhi SNo ratings yet
- AA17Document10 pagesAA17Haile SimachewNo ratings yet
- Development of Arcjet and Ion Propulsion For Spacecraft S - 1993 - Acta AstronauDocument14 pagesDevelopment of Arcjet and Ion Propulsion For Spacecraft S - 1993 - Acta AstronauShivaNatarajNo ratings yet
- Introducing SOST An Ultra-Low-Cost Star Tracker Concept Based On A Raspberry Pi and Open-Source Astronomy SoftwareDocument15 pagesIntroducing SOST An Ultra-Low-Cost Star Tracker Concept Based On A Raspberry Pi and Open-Source Astronomy SoftwareGichuru MuthomiNo ratings yet
- The Use of A Cubesat To Validate Technological Bricks in SpaceDocument7 pagesThe Use of A Cubesat To Validate Technological Bricks in Spacellmm_088No ratings yet
- Leveraging Multiple Artificial Intelligence Techniques To Improve The Responsiveness in Operations Planning: ASPEN For Orbital ExpressDocument11 pagesLeveraging Multiple Artificial Intelligence Techniques To Improve The Responsiveness in Operations Planning: ASPEN For Orbital Expressjmoreno555No ratings yet
- CS (Japan) Press KitDocument15 pagesCS (Japan) Press KitBob AndrepontNo ratings yet
- Alpha Magnetic SpectrometerDocument9 pagesAlpha Magnetic SpectrometerVrund ParikhNo ratings yet
- R1MAAALSDocument13 pagesR1MAAALSYash BhatnagarNo ratings yet
- EDL Technology ReviewDocument32 pagesEDL Technology ReviewJoanne WuNo ratings yet
- Chapter 7 IssDocument127 pagesChapter 7 IssSertug BaşarNo ratings yet
- In-Situ AbstDocument5 pagesIn-Situ AbstFahim MunawarNo ratings yet
- Sonali DC ReportDocument14 pagesSonali DC ReportTejas MhatreNo ratings yet
- Chapter 1Document23 pagesChapter 1JHelfNo ratings yet
- Mission Operations: Glen E. Baer, Raymond J. Harvey, Mark E. Holdridge, Richard K. Huebschman, and Elliot H. RodbergDocument11 pagesMission Operations: Glen E. Baer, Raymond J. Harvey, Mark E. Holdridge, Richard K. Huebschman, and Elliot H. RodbergSai KumarNo ratings yet
- Clasificarea SatelitilorDocument45 pagesClasificarea SatelitilorVictoria LevinteNo ratings yet
- Toward Space-Based Wireless Sensor NetworksDocument21 pagesToward Space-Based Wireless Sensor NetworksAhmed El ShafieNo ratings yet
- Nano Satellite OverviewDocument8 pagesNano Satellite Overviewssiddiqi6No ratings yet
- BR 137-1Document13 pagesBR 137-1Rʌĸɘsʜ GɘʜɭotNo ratings yet
- Investigation of Malaysian Low Earth Orbits For ReDocument10 pagesInvestigation of Malaysian Low Earth Orbits For Remaudira aNo ratings yet
- An Overview of Small Satellites in Remote SensingDocument54 pagesAn Overview of Small Satellites in Remote SensingJohannNo ratings yet
- Expert System for satellite stationkeepingDocument12 pagesExpert System for satellite stationkeepingAjakaiye FolorunshoNo ratings yet
- Antennas For Small Satellite ApplicationsDocument13 pagesAntennas For Small Satellite ApplicationsMr. MERLIN GILBERT RAJ S 1154No ratings yet
- SRMSAT-2 Mission to Study Lunar ScienceDocument282 pagesSRMSAT-2 Mission to Study Lunar SciencePranav CVNo ratings yet
- OTC 22989 Space Robotics Technologies For Deep Well OperationsDocument15 pagesOTC 22989 Space Robotics Technologies For Deep Well OperationsRasheed YusufNo ratings yet
- In - Space - Deployment - Options - For - Large - Space MechanismsDocument23 pagesIn - Space - Deployment - Options - For - Large - Space Mechanismstomek_zawistowskiNo ratings yet
- 2009 Globecom Workshop - Feasibility AeronauticalDocument5 pages2009 Globecom Workshop - Feasibility AeronauticaldesmauroNo ratings yet
- Report ProjectDocument53 pagesReport ProjectRodriguez ArthursNo ratings yet
- Successful Completion of An Ambitious Project - A Midwinter Night's DreamDocument40 pagesSuccessful Completion of An Ambitious Project - A Midwinter Night's DreamEuropean Southern ObservatoryNo ratings yet
- ITU Radio Regulation & Space Traffic ManagementDocument19 pagesITU Radio Regulation & Space Traffic ManagementSaeed JamshidiNo ratings yet
- High-gain S-band Patch Antenna for Earth-observation CubesatsDocument4 pagesHigh-gain S-band Patch Antenna for Earth-observation CubesatsAshim ChakrabortyNo ratings yet
- 7A 8 Savino IRENE Preliminary Study Italian Re Entry NacellE Preliminary StudyDocument9 pages7A 8 Savino IRENE Preliminary Study Italian Re Entry NacellE Preliminary StudydeBuggerNo ratings yet
- An Introduction To The Design of The Cassini Spacecraft: Space Science Reviews July 2002Document26 pagesAn Introduction To The Design of The Cassini Spacecraft: Space Science Reviews July 2002ritter kinsellaNo ratings yet
- Sail DesignDocument8 pagesSail Designsk7g13No ratings yet
- Lessons Learned of Nspo'S Picosatellite Mission: Yamsat - 1A, 1B & 1CDocument13 pagesLessons Learned of Nspo'S Picosatellite Mission: Yamsat - 1A, 1B & 1CSai Swaroop MandalNo ratings yet
- 1 ThompsonDocument12 pages1 ThompsonAnugunti SruthiNo ratings yet
- 2020 - DISCOVERER - The Benefits of VLEO For EO MissionsDocument18 pages2020 - DISCOVERER - The Benefits of VLEO For EO Missionsmert camyaranNo ratings yet
- Exploring Titan and VenusDocument6 pagesExploring Titan and Venusbooknut1No ratings yet
- A Synopsis of Ion Propulsion Development Projects in The US SERT 1 To Deep Space IDocument24 pagesA Synopsis of Ion Propulsion Development Projects in The US SERT 1 To Deep Space IBob AndrepontNo ratings yet
- Apollo Experience Report A Use of Network Simulation Techniques in The Design of The Apollo Lunar Surface Experiments Package Support SystemDocument14 pagesApollo Experience Report A Use of Network Simulation Techniques in The Design of The Apollo Lunar Surface Experiments Package Support SystemBob AndrepontNo ratings yet
- Nasa-Gsfc Nano-Satellite Technology For Earth Science MissionsDocument10 pagesNasa-Gsfc Nano-Satellite Technology For Earth Science MissionsYagmur UzunNo ratings yet
- Communications Satellite Symposium: Proceedings of the XXVIII International Astronautical Congress, Prague, 25 September-1 October 1977From EverandCommunications Satellite Symposium: Proceedings of the XXVIII International Astronautical Congress, Prague, 25 September-1 October 1977L. G. NapolitanoNo ratings yet
- Radio Remote-Control and Telemetry and Their Application to MissilesFrom EverandRadio Remote-Control and Telemetry and Their Application to MissilesRating: 4 out of 5 stars4/5 (1)
- Bis RS 2015 13Document22 pagesBis RS 2015 13John DoeNo ratings yet
- A New Era in Space Flight: The COTS Model of Commercial Partnerships at NASADocument7 pagesA New Era in Space Flight: The COTS Model of Commercial Partnerships at NASAJohn DoeNo ratings yet
- ST7-DRS Mission Colloid Thruster DevelopmentDocument18 pagesST7-DRS Mission Colloid Thruster DevelopmentJohn DoeNo ratings yet
- First Steps Towards The Kingston Space Shot: Dr. Adam M Baker Kingston University LondonDocument8 pagesFirst Steps Towards The Kingston Space Shot: Dr. Adam M Baker Kingston University LondonJohn DoeNo ratings yet
- ST7-DRS Colloid Thruster System Development and Performance SummaryDocument32 pagesST7-DRS Colloid Thruster System Development and Performance SummaryJohn DoeNo ratings yet
- Onset Voltage Modeling of Micromachined Colloid ThrustersDocument8 pagesOnset Voltage Modeling of Micromachined Colloid ThrustersJohn DoeNo ratings yet
- Performance of Heavy Ionic Liquids With Porous Metal Electrospray EmittersDocument10 pagesPerformance of Heavy Ionic Liquids With Porous Metal Electrospray EmittersJohn DoeNo ratings yet
- Development of An Indium mN-FEEP ThrusterDocument9 pagesDevelopment of An Indium mN-FEEP ThrusterJohn DoeNo ratings yet
- Computational Evaluation of Molecular Ion EvaporationDocument6 pagesComputational Evaluation of Molecular Ion EvaporationJohn DoeNo ratings yet
- The Importance of Kimono in SpaceDocument5 pagesThe Importance of Kimono in SpaceJohn DoeNo ratings yet
- 71 International Astronautical Congress (Iac) - The Cyberspace Edition, 12-14 October 2020Document8 pages71 International Astronautical Congress (Iac) - The Cyberspace Edition, 12-14 October 2020John DoeNo ratings yet
- Operating Characteristics of A Re-Generable Field Emission Cathode For Low-Power Electric PropulsionDocument11 pagesOperating Characteristics of A Re-Generable Field Emission Cathode For Low-Power Electric PropulsionJohn DoeNo ratings yet
- 11.water Level ControlDocument43 pages11.water Level Controlsandeep kumarNo ratings yet
- Wa0000.Document48 pagesWa0000.mayanksingh05752No ratings yet
- Tecnam P2006t POH 4 TH EdDocument509 pagesTecnam P2006t POH 4 TH EdPierre Bouvier50% (2)
- Ghidaoui 2004Document14 pagesGhidaoui 2004Abedalkareem GhazalNo ratings yet
- Test Result MotorDocument1 pageTest Result MotoragungNo ratings yet
- AE311 Aerodynamics Tutorial - Streamlines, Pathlines, Streaklines, Mass Conservation, VorticityDocument2 pagesAE311 Aerodynamics Tutorial - Streamlines, Pathlines, Streaklines, Mass Conservation, VorticityShubham MauryaNo ratings yet
- How To Calculate The Viscosity of Blending Oils by Using Below TableDocument7 pagesHow To Calculate The Viscosity of Blending Oils by Using Below TableahmetNo ratings yet
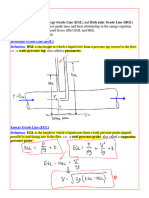
- HGL & EglDocument5 pagesHGL & EglMoch. Dimas PratamaNo ratings yet
- TASD Air-Cooled Screw Chiller Product ManualDocument12 pagesTASD Air-Cooled Screw Chiller Product ManualLuis BermudezNo ratings yet
- Dead-Tank Circuit-Breakers For 72.5 KV Up To 550 KV: Fig. 12: SPS2 / 3AP1 DT 145 KVDocument7 pagesDead-Tank Circuit-Breakers For 72.5 KV Up To 550 KV: Fig. 12: SPS2 / 3AP1 DT 145 KVMichael DavisNo ratings yet
- Structural calculations wind pressure designDocument3 pagesStructural calculations wind pressure designOmar RubioNo ratings yet
- The Forever Rechargeable VARIABLE Super Capacitor Battery !!!Document11 pagesThe Forever Rechargeable VARIABLE Super Capacitor Battery !!!shadyghanemNo ratings yet
- Objective Questions (MCQS) On Unit1 Kec 101T/201T: Diode Operation and ApplicationsDocument24 pagesObjective Questions (MCQS) On Unit1 Kec 101T/201T: Diode Operation and ApplicationsH.M. RaiNo ratings yet
- Review and Simulation of Flyback Topology For Module Level Parallel Inverters in PV Power SystemsDocument6 pagesReview and Simulation of Flyback Topology For Module Level Parallel Inverters in PV Power SystemsAMIT SHARMANo ratings yet
- Science Fusion G2 SE DUSA Unit1-3Document134 pagesScience Fusion G2 SE DUSA Unit1-3Fadi AfanehNo ratings yet
- Investigations On Biulding Thermal PerformancesDocument4 pagesInvestigations On Biulding Thermal PerformancesBryan RuttoNo ratings yet
- Energy Powering Ontarios Growth Report en 2023-07-07Document86 pagesEnergy Powering Ontarios Growth Report en 2023-07-07Randolph SeccafienNo ratings yet
- Gen Rad PrimerDocument58 pagesGen Rad PrimerkgskgmNo ratings yet
- DatasheetDocument6 pagesDatasheetLuis Gustavo ReisNo ratings yet
- York YK Series Operation and Maintenance Form Number 160.76-EG1 - 222 - Supersedes 160.76-EG1 - 1121Document100 pagesYork YK Series Operation and Maintenance Form Number 160.76-EG1 - 222 - Supersedes 160.76-EG1 - 1121Asaad ChughtaiNo ratings yet
- Chapter 8 Electricity and MagnetismDocument30 pagesChapter 8 Electricity and MagnetismPen TuraNo ratings yet
- 1.example First Order ODEDocument9 pages1.example First Order ODEAtikah JNo ratings yet
- Sop Maintenance Final - Part1Document57 pagesSop Maintenance Final - Part1Ashfaque Hussain0% (2)
- Wave Equation Problems and SolutionsDocument4 pagesWave Equation Problems and Solutionsmusic genieNo ratings yet
- Frode Kristian Hansen - Data Analysis of The Cosmic Microwave BackgroundDocument216 pagesFrode Kristian Hansen - Data Analysis of The Cosmic Microwave BackgroundNestorr50No ratings yet
- The Next Generation of Green Dehumidification: Super-Efficient by DesignDocument4 pagesThe Next Generation of Green Dehumidification: Super-Efficient by DesignVenkatesh RYNo ratings yet
- Work and Power WorksheetDocument2 pagesWork and Power WorksheetamyNo ratings yet
- Physic Eng Mech StremaDocument9 pagesPhysic Eng Mech StremaAllyssa ErcillaNo ratings yet
- Room Air Conditioner Service ManualDocument63 pagesRoom Air Conditioner Service ManualBarry Burkan100% (1)
- SPH 3U1 Physics Exam ReviewDocument4 pagesSPH 3U1 Physics Exam ReviewasjiodjwNo ratings yet