You might also like
- Power System Analysis and Design SI Edition 6th Edition Glover Overbye Sarma 130563618X Test BankDocument14 pagesPower System Analysis and Design SI Edition 6th Edition Glover Overbye Sarma 130563618X Test Bankwanda100% (22)
- Test Bank For Power System Analysis and Design Si Edition 6Th Edition Glover Overbye Sarma 130563618X 9781305636187 Full Chapter PDFDocument35 pagesTest Bank For Power System Analysis and Design Si Edition 6Th Edition Glover Overbye Sarma 130563618X 9781305636187 Full Chapter PDFthomas.pelosi630100% (10)
- ps5 Thermal GuideDocument6 pagesps5 Thermal GuideSundaramNo ratings yet
- Test Bank For Power of Power System Analysis and Design 6Th Edition Glover Overbye Sarma 1305632133 9781305632134 Full Chapter PDFDocument35 pagesTest Bank For Power of Power System Analysis and Design 6Th Edition Glover Overbye Sarma 1305632133 9781305632134 Full Chapter PDFthomas.pelosi630100% (12)
- Laboratory 3: The LCR Circuit: Forced, Damped Oscillations.: Phys130 Fall, 2003Document5 pagesLaboratory 3: The LCR Circuit: Forced, Damped Oscillations.: Phys130 Fall, 2003Virali DoshiNo ratings yet
- EE 2257-Control Systems Lab ManualDocument66 pagesEE 2257-Control Systems Lab ManualRam KumarNo ratings yet
- 3 - 2b Transformer Energization - ModelingDocument7 pages3 - 2b Transformer Energization - ModelingNalex GeeNo ratings yet
- chp5 1Document6 pageschp5 1Harshith GowdaNo ratings yet
- Compilation of Matlab Problems and SolutionsDocument14 pagesCompilation of Matlab Problems and SolutionsGem AguimbagNo ratings yet
- Small-Signal Model of A 5kW High-Output Voltage Capacitive-Loaded Series-Parallel Resonant DC-DC ConverterDocument7 pagesSmall-Signal Model of A 5kW High-Output Voltage Capacitive-Loaded Series-Parallel Resonant DC-DC ConverterAshok KumarNo ratings yet
- Exp07Document12 pagesExp07BlindGuy McSqueezyNo ratings yet
- Experiment 106. Stabilisation of A Rotary Inverted Pendulum 1 ObjectiveDocument11 pagesExperiment 106. Stabilisation of A Rotary Inverted Pendulum 1 ObjectiveAmine Y. AlamiNo ratings yet
- Diseño Mecatrónico 50453010 Taller 1: k2 200 N/M, C 150 N-S/M, R2 2 R1 0.4 MDocument3 pagesDiseño Mecatrónico 50453010 Taller 1: k2 200 N/M, C 150 N-S/M, R2 2 R1 0.4 Mkakaja jajaNo ratings yet
- Wein Bridge Oscillators PresentationDocument15 pagesWein Bridge Oscillators PresentationHarish KumarNo ratings yet
- ECE 343 Task6 Group 9Document14 pagesECE 343 Task6 Group 9Phil Robb100% (1)
- K13 T1 SolDocument4 pagesK13 T1 SolPriya Veer0% (1)
- Iir Filter DesignDocument36 pagesIir Filter DesignmuniraevaNo ratings yet
- Transfer functions of an armature controlled DC motorDocument7 pagesTransfer functions of an armature controlled DC motorHardik Agravatt0% (1)
- Phase Shifter TutorialDocument12 pagesPhase Shifter TutorialsukusportyNo ratings yet
- CH 06Document47 pagesCH 06claudioNo ratings yet
- 1 PDFDocument9 pages1 PDFalihasan12No ratings yet
- 6th ChapterDocument23 pages6th ChapterVats AlokNo ratings yet
- Closed Loop Speed Control of a DC Motor Lab ManualDocument9 pagesClosed Loop Speed Control of a DC Motor Lab ManualnatashaNo ratings yet
- 171 390 2 PBDocument23 pages171 390 2 PBCamilaAndreaGrijalbaNo ratings yet
- Semiconductor Application Note: Prepared By: Garth Nash Applications EngineeringDocument12 pagesSemiconductor Application Note: Prepared By: Garth Nash Applications EngineeringefddfdsdsaNo ratings yet
- Web For Principle of Communication - B. Tech 4th SemDocument36 pagesWeb For Principle of Communication - B. Tech 4th SemFurqan Ali Khan100% (1)
- Explore Time & Freq Responses of RLC CircuitsDocument8 pagesExplore Time & Freq Responses of RLC CircuitsRudra MishraNo ratings yet
- SERIES SINUSOIDAL CIRCUITS EXPERIMENTDocument8 pagesSERIES SINUSOIDAL CIRCUITS EXPERIMENTMisna Blasco ZurbanoNo ratings yet
- TF Armature Controlled DC MotorDocument9 pagesTF Armature Controlled DC Motoremail2vadivel100% (2)
- BBAU University B.Tech Exam Q&A on Network AnalysisDocument9 pagesBBAU University B.Tech Exam Q&A on Network AnalysisPrakharGupta100% (1)
- Series RC Circuit: Electrical and Electronic EngineeringDocument7 pagesSeries RC Circuit: Electrical and Electronic Engineeringخہٰہٰالہٰد ۦ' ۦ'No ratings yet
- Chapter 5Document74 pagesChapter 5Juan LealNo ratings yet
- Characterization of High-Q Resonators For Microwave Filter ApplicationsDocument4 pagesCharacterization of High-Q Resonators For Microwave Filter ApplicationshazardassNo ratings yet
- Oscillator and amplifier circuit calculationsDocument5 pagesOscillator and amplifier circuit calculationsanjanaNo ratings yet
- Control BoostDocument10 pagesControl BoostNikunj AgarwalNo ratings yet
- An Automated Method For Measuring Quartz CrystalsDocument6 pagesAn Automated Method For Measuring Quartz CrystalsAnonymous Kti5jq5EJINo ratings yet
- Digital Filter Design-DSPDocument113 pagesDigital Filter Design-DSPClique for Applied Research in Electronic Technology100% (2)
- PowerSystem Set1Document9 pagesPowerSystem Set1shivansh gandhiNo ratings yet
- Resonancia SubsincronaDocument16 pagesResonancia SubsincronaSheyla Elizabeth Santamaria RoqueNo ratings yet
- Exam Vibrations and NoiseDocument5 pagesExam Vibrations and NoisejoaoftabreuNo ratings yet
- Constant-K Filters Lab ReportDocument3 pagesConstant-K Filters Lab ReportSantosh Kumar100% (1)
- Transient Response Counts When Choosing Phase MarginDocument4 pagesTransient Response Counts When Choosing Phase Marginharis13harisNo ratings yet
- Probset 2 SolnDocument10 pagesProbset 2 SolnDominic MendozaNo ratings yet
- Presentation On Synchronous Machine Model: Tandin Jamtsho STUDENT #3226091Document30 pagesPresentation On Synchronous Machine Model: Tandin Jamtsho STUDENT #3226091Parameswararao BillaNo ratings yet
- Numerical Methods Final Requirements ShshsiwzbDocument10 pagesNumerical Methods Final Requirements ShshsiwzbIñigo Carlos AquinoNo ratings yet
- 01 RLC Circuit and ResonanceDocument46 pages01 RLC Circuit and ResonanceLatif Nurohman Bayu Nugroho60% (5)
- Control System NotesDocument199 pagesControl System NotesCarson R. Dick100% (2)
- EE 483 Exam 1 - SolutionsDocument8 pagesEE 483 Exam 1 - Solutionsరవితేజ నంబూరుNo ratings yet
- Ee 331 Design - Servo MotorDocument5 pagesEe 331 Design - Servo MotorLa-Pierre O'MeallyNo ratings yet
- EE Prof Subject With SolutionDocument10 pagesEE Prof Subject With SolutionKim FetalverNo ratings yet
- RT Exercises and Solutions Med TentatalDocument264 pagesRT Exercises and Solutions Med TentatalSANA100% (1)
- Transfer Function of D.c.machine Using Generalised Machine TheoryDocument18 pagesTransfer Function of D.c.machine Using Generalised Machine Theorychethan64% (11)
- Handbook of Power Systems Engineering with Power Electronics ApplicationsFrom EverandHandbook of Power Systems Engineering with Power Electronics ApplicationsNo ratings yet
- Exercises in Electronics: Operational Amplifier CircuitsFrom EverandExercises in Electronics: Operational Amplifier CircuitsRating: 3 out of 5 stars3/5 (1)
- Easy(er) Electrical Principles for Extra Class Ham License (2012-2016)From EverandEasy(er) Electrical Principles for Extra Class Ham License (2012-2016)No ratings yet
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsFrom EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNo ratings yet
- AMX Controller NI-3000 Instruction ManualDocument134 pagesAMX Controller NI-3000 Instruction Manualavinash129No ratings yet
- Introduction To Semiconductor DiodesDocument7 pagesIntroduction To Semiconductor DiodesAndy CentenaNo ratings yet
- Delta ES48-30A-3-JFA Power System PDFDocument2 pagesDelta ES48-30A-3-JFA Power System PDFNdambuki DicksonNo ratings yet
- Power Factor CorrectionDocument44 pagesPower Factor CorrectionJohn Kevin SarmientoNo ratings yet
- Decanter BCC Software Revision History and Release NotesDocument12 pagesDecanter BCC Software Revision History and Release Notesosvaldo cabreraNo ratings yet
- Poptronics 1974 12 PDFDocument108 pagesPoptronics 1974 12 PDFAhmet KarabeyNo ratings yet
- 1 Metallic Cable Transmission Media by Engr. Richard FigueroaDocument32 pages1 Metallic Cable Transmission Media by Engr. Richard FigueroaKeng TarucNo ratings yet
- Unit 2 2 MarkDocument5 pagesUnit 2 2 Markyasmin niharaNo ratings yet
- Photodiode and SolarcellDocument33 pagesPhotodiode and Solarcellgirishkumardarisi254No ratings yet
- Manuel D'utilisation de La Centrale de Detection Incendie Cfp704-4Document24 pagesManuel D'utilisation de La Centrale de Detection Incendie Cfp704-4mbaelecNo ratings yet
- Linear Voltage-Controlled Waveform Generator DesignDocument35 pagesLinear Voltage-Controlled Waveform Generator Designjeanclaudelclarke_92No ratings yet
- Precision Single, Dual and Quad Low Noise Operational Amplifiers PDFDocument32 pagesPrecision Single, Dual and Quad Low Noise Operational Amplifiers PDFPaul DumitruNo ratings yet
- Midas Legend 3000 ManualDocument84 pagesMidas Legend 3000 ManualAleksandar MajorNo ratings yet
- AVR1Document12 pagesAVR1Grid LockNo ratings yet
- Prn256m8v69ag8gkf 15eDocument12 pagesPrn256m8v69ag8gkf 15eArif YuliantoNo ratings yet
- VTU DSP Lab Manual 5th Sem E C Matlab Programs and CCS Studio ProgramsDocument35 pagesVTU DSP Lab Manual 5th Sem E C Matlab Programs and CCS Studio ProgramsSundaram NatarajanNo ratings yet
- EmtDocument115 pagesEmtRaj SharmaNo ratings yet
- TDJ 709016dei 90FDocument1 pageTDJ 709016dei 90FAnonymous ZlPONGNo ratings yet
- DigiTech Element Element XP Manual-25Document1 pageDigiTech Element Element XP Manual-25CaPitalNo ratings yet
- Bio StationDocument2 pagesBio StationErick Dahomey Arévalo PuenteNo ratings yet
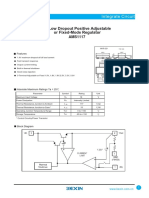
- SMD Type IC SMD Type Integrate Circuit: 1A Low Dropout Positive Adjustable or Fixed-Mode RegulatorDocument2 pagesSMD Type IC SMD Type Integrate Circuit: 1A Low Dropout Positive Adjustable or Fixed-Mode RegulatorosmelNo ratings yet
- Description: CCFL Transformers Cold Cathode Fluorescent Lamp Inverter TransformersDocument4 pagesDescription: CCFL Transformers Cold Cathode Fluorescent Lamp Inverter TransformersRizqi FirmansyahNo ratings yet
- FM ExperimentDocument21 pagesFM ExperimentDeepak SinglaNo ratings yet
- 3500/32 4-Channel Relay Module Specs and Order InfoDocument5 pages3500/32 4-Channel Relay Module Specs and Order InfoShivakumarNo ratings yet
- L293D Motor Control Shield: FeaturesDocument6 pagesL293D Motor Control Shield: FeaturesJefferson HenriqueNo ratings yet
- Samsung Le23r86bd Le26r86bd Le32r86bd Le32r82bx Le37r86bd Le37r81bx Le40r86bd Le40r82bx PDFDocument157 pagesSamsung Le23r86bd Le26r86bd Le32r86bd Le32r82bx Le37r86bd Le37r81bx Le40r86bd Le40r82bx PDFtodorloncarskiNo ratings yet
- PCS 921Document4 pagesPCS 921mentongNo ratings yet
- DatasheetDocument22 pagesDatasheetStuxnetNo ratings yet
- WPCDocument14 pagesWPCRahulNo ratings yet
- NES5100 ManualDocument185 pagesNES5100 ManualDinh Van QuangNo ratings yet