You might also like
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11From EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11No ratings yet
- Explore Time & Freq Responses of RLC CircuitsDocument8 pagesExplore Time & Freq Responses of RLC CircuitsRudra MishraNo ratings yet
- Feynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterFrom EverandFeynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterNo ratings yet
- Experiment # 1: Time and Frequency Responses of Series RLC CircuitsDocument6 pagesExperiment # 1: Time and Frequency Responses of Series RLC CircuitsJhonn HuamFloNo ratings yet
- Easy(er) Electrical Principles for Extra Class Ham License (2012-2016)From EverandEasy(er) Electrical Principles for Extra Class Ham License (2012-2016)No ratings yet
- Math 225-04 §3.8-9 Electrical Oscillations and ResonanceDocument6 pagesMath 225-04 §3.8-9 Electrical Oscillations and ResonanceRameeshPaulNo ratings yet
- Electronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 1From EverandElectronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 1No ratings yet
- RLC Circuit Responses: Overdamped, Underdamped & Critically DampedDocument4 pagesRLC Circuit Responses: Overdamped, Underdamped & Critically Dampedअमरेश झाNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Link Between Phase Margin and Converter Transient ResponseDocument7 pagesLink Between Phase Margin and Converter Transient ResponseVIJAYPUTRANo ratings yet
- Basics of LC Oscillators: Excerpted From "The Designer's Guide To High-Purity Oscillators" by Hegazi, Rael, and AbidiDocument9 pagesBasics of LC Oscillators: Excerpted From "The Designer's Guide To High-Purity Oscillators" by Hegazi, Rael, and Abidiamr khaledNo ratings yet
- LRC Circuit Transient Response ExperimentDocument5 pagesLRC Circuit Transient Response ExperimentskyghNo ratings yet
- R-L & R-C CircuitsDocument41 pagesR-L & R-C CircuitsAlamgir Kabir ShuvoNo ratings yet
- Art 2 OsciladoresDocument6 pagesArt 2 OsciladoresPablo MontoyaNo ratings yet
- Ee3101 Lab Report ExpDocument16 pagesEe3101 Lab Report ExpyucesNo ratings yet
- Impedance, Angular Velocities & Frequencies of Oscillating CurrentsDocument32 pagesImpedance, Angular Velocities & Frequencies of Oscillating CurrentselectrosciNo ratings yet
- Electromagnetic Oscillations and Alternating Current: in This Chapter We Will Cover The Following TopicsDocument31 pagesElectromagnetic Oscillations and Alternating Current: in This Chapter We Will Cover The Following Topicsnadir9999No ratings yet
- 1016 Hanshaw Road Ithaca, Ny 14850 Aug. 1, 2016Document10 pages1016 Hanshaw Road Ithaca, Ny 14850 Aug. 1, 2016David MartinsNo ratings yet
- Finite Amplifier Gain and Bandwidth Effects in Switched-Capacitor FiltersDocument4 pagesFinite Amplifier Gain and Bandwidth Effects in Switched-Capacitor Filtersbasemsoufi2No ratings yet
- Analog Circuit Analysis and Simulation Using PSpiceDocument3 pagesAnalog Circuit Analysis and Simulation Using PSpiceTalha AamirNo ratings yet
- Laplace Transforms and Its Wide-Ranging Engineering ApplicationsDocument4 pagesLaplace Transforms and Its Wide-Ranging Engineering ApplicationsAhmed S. El-MoghazyNo ratings yet
- RLC Transfer Function AnalysisDocument38 pagesRLC Transfer Function AnalysisMarasigan Ryan50% (2)
- Calculation of RC FiltersDocument10 pagesCalculation of RC FiltersAnonymous DjWqKpZ1No ratings yet
- A Discussion About Maximum Power TransferDocument8 pagesA Discussion About Maximum Power TransferRebwar Osman100% (1)
- LCR CircuitDocument14 pagesLCR CircuitCOSM-OS50% (2)
- Transient Response Counts When Choosing Phase MarginDocument4 pagesTransient Response Counts When Choosing Phase Marginharis13harisNo ratings yet
- Rectifier Modulators With Frequency-Selective TerminationsDocument12 pagesRectifier Modulators With Frequency-Selective TerminationsshirtquittersNo ratings yet
- Laboratorio 4 FisicaDocument15 pagesLaboratorio 4 FisicaAlejandro RodriguezNo ratings yet
- A Revisitation of The 1888 H.Hertz Experiment: PACS NumbersDocument3 pagesA Revisitation of The 1888 H.Hertz Experiment: PACS NumbersNela_MS93No ratings yet
- Ac Circuit Simulation: i (t) =I sin (ωt) =I si n (2 π f t)Document4 pagesAc Circuit Simulation: i (t) =I sin (ωt) =I si n (2 π f t)M.USMAN BIN AHMEDNo ratings yet
- Wein Bridge Oscillators PresentationDocument15 pagesWein Bridge Oscillators PresentationHarish KumarNo ratings yet
- Experimental Test Finds No Evidence of Finite Photon MassDocument40 pagesExperimental Test Finds No Evidence of Finite Photon MassNestor GasparNo ratings yet
- electromagnetic waveDocument33 pageselectromagnetic waveDurriyah AmiiNo ratings yet
- Settling Time of OpampDocument7 pagesSettling Time of OpampTumay KanarNo ratings yet
- Translines ProjectDocument8 pagesTranslines ProjectOdellien SajaNo ratings yet
- App 4 LaplaceDocument6 pagesApp 4 LaplaceRycille AlayanNo ratings yet
- Parametric Amplifiers and Converters With Pumped Inductance and CapacitanceDocument5 pagesParametric Amplifiers and Converters With Pumped Inductance and CapacitanceshirtquittersNo ratings yet
- Currents Through Inductances, Capacitances and ResistancesDocument14 pagesCurrents Through Inductances, Capacitances and ResistancesZulu LoveNo ratings yet
- 01 RLC Circuit and ResonanceDocument46 pages01 RLC Circuit and ResonanceLatif Nurohman Bayu Nugroho60% (5)
- Second-Order Ring Modulator: Calculations of Losses and Some Design ConsiderationsDocument6 pagesSecond-Order Ring Modulator: Calculations of Losses and Some Design ConsiderationsshirtquittersNo ratings yet
- RLC circuit resonance frequency tuningDocument9 pagesRLC circuit resonance frequency tuningHemangee PurohitNo ratings yet
- R. R. Lindberg Et Al - Robust Autoresonant Excitation in The Plasma Beat-Wave AcceleratorDocument4 pagesR. R. Lindberg Et Al - Robust Autoresonant Excitation in The Plasma Beat-Wave AcceleratorVasmazxNo ratings yet
- Chapter 11 AC ResonanceDocument20 pagesChapter 11 AC ResonanceErin LoveNo ratings yet
- PoEC 18 RLC Circuits and ResonanceDocument52 pagesPoEC 18 RLC Circuits and ResonanceKrishnaveni Subramani SNo ratings yet
- 6 LCRDocument8 pages6 LCRGentianaNo ratings yet
- LCR Circuits: Learning Objectives of This Experiment Is That Students Will Be Able ToDocument6 pagesLCR Circuits: Learning Objectives of This Experiment Is That Students Will Be Able ToAryan sahuNo ratings yet
- Capacitive Feed Through Calculations in MOSFET IC'sDocument2 pagesCapacitive Feed Through Calculations in MOSFET IC'sharishkumarsinghNo ratings yet
- Resonant CircuitsDocument51 pagesResonant CircuitsHaris Bin KhalidNo ratings yet
- Parametric Amplifiers: Static and Dynamic Inductance and Capacitance and Their Significance in The Non-Linear and Time-Varying ApproachesDocument3 pagesParametric Amplifiers: Static and Dynamic Inductance and Capacitance and Their Significance in The Non-Linear and Time-Varying ApproachesshirtquittersNo ratings yet
- 808PET22 Eliminate Crossover Frequency Guesswork PDFDocument6 pages808PET22 Eliminate Crossover Frequency Guesswork PDFRamin DavoodiNo ratings yet
- 2labman lcr7Document8 pages2labman lcr7RufosNo ratings yet
- High-Field Laser Physics: ETH Zürich Spring Semester 2010 H. R. ReissDocument34 pagesHigh-Field Laser Physics: ETH Zürich Spring Semester 2010 H. R. ReissjasmonNo ratings yet
- Sagnac Effect in Fiber GyroscopesDocument3 pagesSagnac Effect in Fiber GyroscopesRamiro Zakate ContrerasNo ratings yet
- RC-RL and RLC CircuitsDocument15 pagesRC-RL and RLC CircuitsHaris Noushahi50% (2)
- Pulses in Cables: ReferencesDocument5 pagesPulses in Cables: ReferencesPaul DumitruNo ratings yet
- 241 RLC Circuit Ac SourceDocument14 pages241 RLC Circuit Ac SourceWsma AmswNo ratings yet
- RLC Circuit Simulation Using PSpiceDocument8 pagesRLC Circuit Simulation Using PSpiceRudra MishraNo ratings yet
- 3 - 2b Transformer Energization - ModelingDocument7 pages3 - 2b Transformer Energization - ModelingNalex GeeNo ratings yet
- 5LABO Ganago Student Lab6Document24 pages5LABO Ganago Student Lab6Rocio Deidamia Puppi HerreraNo ratings yet
- Methods of preparation and properties of amines, alkyl cyanides, nitro compounds and aromatic nitro compoundsDocument22 pagesMethods of preparation and properties of amines, alkyl cyanides, nitro compounds and aromatic nitro compoundsVanshika JainNo ratings yet
- Experiment 91 Consumer ChemistryDocument8 pagesExperiment 91 Consumer ChemistryDascaliuc DanielNo ratings yet
- Morteza MirzaeiDocument3 pagesMorteza MirzaeiUmitNo ratings yet
- Cold Rolled Steel Sections - Specification: Kenya StandardDocument21 pagesCold Rolled Steel Sections - Specification: Kenya StandardPEng. Tech. Alvince KoreroNo ratings yet
- Mci 2005Document3 pagesMci 2005Christos LeptokaridisNo ratings yet
- Internship ReportDocument33 pagesInternship Reportstreamingmedia786No ratings yet
- Etoricoxib Decreases Subchondrial Bone MassDocument9 pagesEtoricoxib Decreases Subchondrial Bone MassQuímica y FarmaciaNo ratings yet
- EE-260 Lecture on Electro-Mechanical Systems and Induced TorqueDocument19 pagesEE-260 Lecture on Electro-Mechanical Systems and Induced TorqueJeff HardyNo ratings yet
- RTC Invoice 2965 Gj29es2223100505Document1 pageRTC Invoice 2965 Gj29es2223100505Alok PandeyNo ratings yet
- DetergentsDocument12 pagesDetergentsBujju BujjukuttyNo ratings yet
- The Guitar in The Middle Ages and RenaisDocument4 pagesThe Guitar in The Middle Ages and RenaisТаня АфанасьеваNo ratings yet
- A Poison Tree: Literature: Form 5 PoemDocument7 pagesA Poison Tree: Literature: Form 5 PoemRosli MohdNo ratings yet
- VOLLEYBALL HISTORY AND RULESDocument12 pagesVOLLEYBALL HISTORY AND RULESJennybelle MolinaNo ratings yet
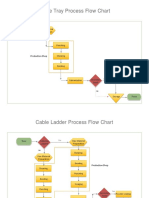
- Process Flow ChartDocument4 pagesProcess Flow Chartchacko chiramalNo ratings yet
- LugeonDocument13 pagesLugeonRojan MaghsoodifarNo ratings yet
- Yutra 3Document31 pagesYutra 3ကိုနေဝင်းNo ratings yet
- ConMed v. Cosmescu Et. Al.Document28 pagesConMed v. Cosmescu Et. Al.PriorSmartNo ratings yet
- Electric Tool Parts List: Air Compressor 2007 - 04 - 02 Model EC 119 (E3)Document3 pagesElectric Tool Parts List: Air Compressor 2007 - 04 - 02 Model EC 119 (E3)Ivan GallegosNo ratings yet
- Aetna Dental Low DmoDocument9 pagesAetna Dental Low DmoBeau PeskaNo ratings yet
- DC TC 600 L, 01.00, enDocument61 pagesDC TC 600 L, 01.00, enDarkNo ratings yet
- GM Bluetooth Quick GuideDocument5 pagesGM Bluetooth Quick GuideTin_AmoNo ratings yet
- Island of The Blue Dolphins: Before You Read The ChaptersDocument12 pagesIsland of The Blue Dolphins: Before You Read The ChaptersCostea CibanuNo ratings yet
- Level 2 Repair: 7-1. Components On The Rear CaseDocument8 pagesLevel 2 Repair: 7-1. Components On The Rear CaseNguyễn Duy LinhNo ratings yet
- The State of Madflya Pradesh: Chaptee SeconDocument38 pagesThe State of Madflya Pradesh: Chaptee Seconnavdeep tiwariNo ratings yet
- Resumen en Ingles Del Diario Ana Frank Chisaguano EmilyDocument16 pagesResumen en Ingles Del Diario Ana Frank Chisaguano EmilyChisaguano EmilyNo ratings yet
- Postdoctoral Research Associate in Functional Organic MaterialsDocument6 pagesPostdoctoral Research Associate in Functional Organic MaterialsTheo GazisNo ratings yet
- Ancient Indian WeaponsDocument25 pagesAncient Indian WeaponsjasmineNo ratings yet
- Week 3 Ipe Review ModuleDocument2 pagesWeek 3 Ipe Review ModuleDarren Ian MaalihanNo ratings yet
- Copper Alloy UNS C23000: Sponsored LinksDocument2 pagesCopper Alloy UNS C23000: Sponsored LinksvinayNo ratings yet
- Types of DisasterDocument22 pagesTypes of DisasterKirstin del CarmenNo ratings yet
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseFrom EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseRating: 3.5 out of 5 stars3.5/5 (69)
- Knocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldFrom EverandKnocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldRating: 3.5 out of 5 stars3.5/5 (64)
- Packing for Mars: The Curious Science of Life in the VoidFrom EverandPacking for Mars: The Curious Science of Life in the VoidRating: 4 out of 5 stars4/5 (1395)
- Quantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessFrom EverandQuantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessRating: 4 out of 5 stars4/5 (6)
- A Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceFrom EverandA Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceRating: 4 out of 5 stars4/5 (51)
- A Brief History of Time: From the Big Bang to Black HolesFrom EverandA Brief History of Time: From the Big Bang to Black HolesRating: 4 out of 5 stars4/5 (2193)
- Lost in Math: How Beauty Leads Physics AstrayFrom EverandLost in Math: How Beauty Leads Physics AstrayRating: 4.5 out of 5 stars4.5/5 (125)
- The Physics of God: How the Deepest Theories of Science Explain Religion and How the Deepest Truths of Religion Explain ScienceFrom EverandThe Physics of God: How the Deepest Theories of Science Explain Religion and How the Deepest Truths of Religion Explain ScienceRating: 4.5 out of 5 stars4.5/5 (23)
- Quantum Physics: What Everyone Needs to KnowFrom EverandQuantum Physics: What Everyone Needs to KnowRating: 4.5 out of 5 stars4.5/5 (48)
- Quantum Physics for Beginners Who Flunked Math And Science: Quantum Mechanics And Physics Made Easy Guide In Plain Simple EnglishFrom EverandQuantum Physics for Beginners Who Flunked Math And Science: Quantum Mechanics And Physics Made Easy Guide In Plain Simple EnglishRating: 4.5 out of 5 stars4.5/5 (18)
- The Tao of Physics: An Exploration of the Parallels between Modern Physics and Eastern MysticismFrom EverandThe Tao of Physics: An Exploration of the Parallels between Modern Physics and Eastern MysticismRating: 4 out of 5 stars4/5 (500)
- Summary and Interpretation of Reality TransurfingFrom EverandSummary and Interpretation of Reality TransurfingRating: 5 out of 5 stars5/5 (5)
- The End of Everything: (Astrophysically Speaking)From EverandThe End of Everything: (Astrophysically Speaking)Rating: 4.5 out of 5 stars4.5/5 (155)
- The Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeFrom EverandThe Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeNo ratings yet
- The Power of Eight: Harnessing the Miraculous Energies of a Small Group to Heal Others, Your Life, and the WorldFrom EverandThe Power of Eight: Harnessing the Miraculous Energies of a Small Group to Heal Others, Your Life, and the WorldRating: 4.5 out of 5 stars4.5/5 (54)
- Midnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterFrom EverandMidnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterRating: 4.5 out of 5 stars4.5/5 (409)
- Paradox: The Nine Greatest Enigmas in PhysicsFrom EverandParadox: The Nine Greatest Enigmas in PhysicsRating: 4 out of 5 stars4/5 (57)
- Bedeviled: A Shadow History of Demons in ScienceFrom EverandBedeviled: A Shadow History of Demons in ScienceRating: 5 out of 5 stars5/5 (5)
- Black Holes: The Key to Understanding the UniverseFrom EverandBlack Holes: The Key to Understanding the UniverseRating: 4.5 out of 5 stars4.5/5 (13)
- What is Life?: With Mind and Matter and Autobiographical SketchesFrom EverandWhat is Life?: With Mind and Matter and Autobiographical SketchesRating: 4 out of 5 stars4/5 (139)
- Starry Messenger: Cosmic Perspectives on CivilizationFrom EverandStarry Messenger: Cosmic Perspectives on CivilizationRating: 4.5 out of 5 stars4.5/5 (158)