You might also like
- C15 Engine: Electrical Circuit DiagramDocument12 pagesC15 Engine: Electrical Circuit DiagramPhil B.100% (1)
- Part1 Medicinal Plants in PNGDocument172 pagesPart1 Medicinal Plants in PNGMadison Roland-Evans100% (6)
- BA JapanesePG PDFDocument7 pagesBA JapanesePG PDFIan IskandarNo ratings yet
- Mummy The Curse Storytellers Vault Style Guide (With Bookmarks) 3 - 29 - 2019Document12 pagesMummy The Curse Storytellers Vault Style Guide (With Bookmarks) 3 - 29 - 2019Nick Iijima100% (2)
- Vdocument - in LRT Design GuidelinesDocument490 pagesVdocument - in LRT Design GuidelinesAlly KhooNo ratings yet
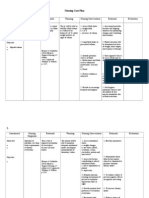
- Nursing Care Plan CKDDocument6 pagesNursing Care Plan CKDReylan Deo Rallo Asio100% (5)
- DV TUD Brochure 2015v2-SecuredDocument16 pagesDV TUD Brochure 2015v2-SecuredJR RZNo ratings yet
- Fabrication of 2 X 1000 MT Capacity Mounded LPG Storage VesselsDocument84 pagesFabrication of 2 X 1000 MT Capacity Mounded LPG Storage VesselsMilan DjumicNo ratings yet
- Gaussian QuadratureDocument10 pagesGaussian QuadratureLeonardoNo ratings yet
- Synthesis Paper On Nuclear PPDocument3 pagesSynthesis Paper On Nuclear PPchristinekehyengNo ratings yet
- Imroved Training WassersteinDocument19 pagesImroved Training Wassersteinmihai ilieNo ratings yet
- Survit Sra Efficient Primal SVMDocument8 pagesSurvit Sra Efficient Primal SVMDipesh MakwanaNo ratings yet
- Nips Demoreport 120709 ResearchDocument17 pagesNips Demoreport 120709 Researchverlaine88No ratings yet
- Exponential Convergence Rates For Batch Normalization - 2Document1 pageExponential Convergence Rates For Batch Normalization - 2octoparse8No ratings yet
- Anderson - More Is DifferentDocument9 pagesAnderson - More Is DifferentDaniel OrsiniNo ratings yet
- Crammer, Kulesza, Dredze - 2009 - Adaptive Regularization of Weighted VectorsDocument9 pagesCrammer, Kulesza, Dredze - 2009 - Adaptive Regularization of Weighted VectorsBlack FoxNo ratings yet
- Differentiable Quantization of Deep Neural Networks: Equal ContributionDocument21 pagesDifferentiable Quantization of Deep Neural Networks: Equal ContributionganeshNo ratings yet
- 17184-77356-1-PB PDFDocument10 pages17184-77356-1-PB PDFMohd Haroon AnsariNo ratings yet
- A Qubo Formulation of Minimum Multicut Problem Instances in Trees For D-Wave Quantum AnnealersDocument12 pagesA Qubo Formulation of Minimum Multicut Problem Instances in Trees For D-Wave Quantum AnnealersRodrigoNo ratings yet
- Analysis For Graph Based SLAM Algorithms Under G2o FrameworkDocument11 pagesAnalysis For Graph Based SLAM Algorithms Under G2o FrameworkTruong Trong TinNo ratings yet
- Appunti MLDocument10 pagesAppunti MLvincentNo ratings yet
- Kriging: Applied Geostatistics For Mining ProfessionalsDocument37 pagesKriging: Applied Geostatistics For Mining Professionalscrista essienNo ratings yet
- Thesis Proposal: Graph Structured Statistical Inference: James SharpnackDocument20 pagesThesis Proposal: Graph Structured Statistical Inference: James SharpnackaliNo ratings yet
- An Alternate Path Integral For Quantum GravityDocument30 pagesAn Alternate Path Integral For Quantum GravitySeby SegretoNo ratings yet
- ICH HeuristicDocument9 pagesICH Heuristicdragance107No ratings yet
- Constrained Optimization Solving Sample Average Aproximation CCPDocument32 pagesConstrained Optimization Solving Sample Average Aproximation CCPjmcfavzlrmywqrkgsrNo ratings yet
- 6114 Weight Normalization A Simple Reparameterization To Accelerate Training of Deep Neural NetworksDocument9 pages6114 Weight Normalization A Simple Reparameterization To Accelerate Training of Deep Neural NetworksJose Miguel AlvesNo ratings yet
- Report 4Document8 pagesReport 4Mahmoud KatayaNo ratings yet
- The Bayesian Elastic NetDocument20 pagesThe Bayesian Elastic Netgerald372901No ratings yet
- Green's Theorem and Isolation in Planar Graphs: Raghunath Tewari N. V. Vinodchandran September 30, 2010Document10 pagesGreen's Theorem and Isolation in Planar Graphs: Raghunath Tewari N. V. Vinodchandran September 30, 2010carlosandres2040No ratings yet
- cs188 Fa23 Note23Document2 pagescs188 Fa23 Note23Ali RahimiNo ratings yet
- The Problem of OverfittingDocument40 pagesThe Problem of OverfittingSahil KaushishNo ratings yet
- Approximating Steiner Networks With Node Weights: Zeev NutovDocument26 pagesApproximating Steiner Networks With Node Weights: Zeev NutovEduardo Álvarez-MirandaNo ratings yet
- AdalineDocument28 pagesAdalineAnonymous 05P3kMINo ratings yet
- A Connection Between Score MatchingDocument13 pagesA Connection Between Score MatchingPixel DinosaurNo ratings yet
- 200 Energy Based Generative AdversDocument17 pages200 Energy Based Generative AdversAjayNo ratings yet
- Lnotes 05Document5 pagesLnotes 05mouaad ibnealryfNo ratings yet
- SoftFRAC Matlab Library For RealizationDocument10 pagesSoftFRAC Matlab Library For RealizationKotadai Le ZKNo ratings yet
- A Connection Between Score Matching and Denoising AutoencodersDocument14 pagesA Connection Between Score Matching and Denoising AutoencodersalekthieryNo ratings yet
- Supported by The Austrian Science Fund (FWF) Under Grant SFB F32 "Mathematical Optimization and Applications in Biomedical Sciences"Document4 pagesSupported by The Austrian Science Fund (FWF) Under Grant SFB F32 "Mathematical Optimization and Applications in Biomedical Sciences"Yacer Hadadi RadwanNo ratings yet
- Linear Models For Classification: Sumeet Agarwal, EEL709 (Most Figures From Bishop, PRML)Document21 pagesLinear Models For Classification: Sumeet Agarwal, EEL709 (Most Figures From Bishop, PRML)Anonymous BqTt5TdDSNo ratings yet
- Midterm 2010 FDocument15 pagesMidterm 2010 FMuhammad MurtazaNo ratings yet
- 10-701/15-781 Machine Learning - Midterm Exam, Fall 2010: Aarti Singh Carnegie Mellon UniversityDocument15 pages10-701/15-781 Machine Learning - Midterm Exam, Fall 2010: Aarti Singh Carnegie Mellon Universityale mekeNo ratings yet
- Journal of Computational and Applied Mathematics: Yanli Zhai, Dazhi Zhang, Jiebao Sun, Boying WuDocument8 pagesJournal of Computational and Applied Mathematics: Yanli Zhai, Dazhi Zhang, Jiebao Sun, Boying WuspavalNo ratings yet
- Lec 6 TutorialDocument27 pagesLec 6 TutorialsentryNo ratings yet
- Bayesian Methods For Support Vector Machines: Evidence and Predictive Class ProbabilitiesDocument32 pagesBayesian Methods For Support Vector Machines: Evidence and Predictive Class ProbabilitiesAnonymous PKE8zOXNo ratings yet
- Quantum Computing and Quadratically Signed Weight Enumerators (Information Processing Letters, Vol. 79, Issue 4) (2001)Document7 pagesQuantum Computing and Quadratically Signed Weight Enumerators (Information Processing Letters, Vol. 79, Issue 4) (2001)sepot24093No ratings yet
- Linear Convergence of Adaptive Stochastic Gradient DescentDocument19 pagesLinear Convergence of Adaptive Stochastic Gradient DescentGaston GBNo ratings yet
- Classical and Quantum Considerations of Two-Dimensional GravityDocument18 pagesClassical and Quantum Considerations of Two-Dimensional Gravitywalter huNo ratings yet
- Optimization Based Full Body Control For The Atlas RobotDocument8 pagesOptimization Based Full Body Control For The Atlas Robot曾龙No ratings yet
- Continuous LWE Is As Hard As LWE: & Applications To Learning Gaussian MixturesDocument44 pagesContinuous LWE Is As Hard As LWE: & Applications To Learning Gaussian MixturesSaikat GopeNo ratings yet
- Param Estim TikhonovDocument16 pagesParam Estim TikhonovYacer Hadadi RadwanNo ratings yet
- Linear Models (Unit II) Chapter III 1Document24 pagesLinear Models (Unit II) Chapter III 1AnilNo ratings yet
- Output) ) : 1.8 Empirical Results and Implementations 21Document2 pagesOutput) ) : 1.8 Empirical Results and Implementations 21rotero_pujolNo ratings yet
- Machine Learning Approach To Conjoint Analysis PaperDocument8 pagesMachine Learning Approach To Conjoint Analysis Papermali_me12No ratings yet
- A Generalized Composition Algorithm For Weighted Finite-State TransducersDocument4 pagesA Generalized Composition Algorithm For Weighted Finite-State TransducersJoaquínNo ratings yet
- Extreme Value Theory: A Primer: Harald E. Rieder Lamont-Doherty Earth Observatory 9/8/2014Document57 pagesExtreme Value Theory: A Primer: Harald E. Rieder Lamont-Doherty Earth Observatory 9/8/2014BetoNo ratings yet
- SinhaDu16 PDFDocument20 pagesSinhaDu16 PDFÜmit AslanNo ratings yet
- MIT6 832s09 Exam01 PracticeDocument4 pagesMIT6 832s09 Exam01 PracticePiero RaurauNo ratings yet
- Duality Estimation Control GoodwinDocument10 pagesDuality Estimation Control GoodwinArthur CostaNo ratings yet
- Convergence of the generalized-α scheme for constrained mechanical systemsDocument18 pagesConvergence of the generalized-α scheme for constrained mechanical systemsCesar HernandezNo ratings yet
- Gls PDFDocument12 pagesGls PDFJuan CamiloNo ratings yet
- CS 229, Public Course Problem Set #4: Unsupervised Learning and Re-Inforcement LearningDocument5 pagesCS 229, Public Course Problem Set #4: Unsupervised Learning and Re-Inforcement Learningsuhar adiNo ratings yet
- NIPS 2000 A Support Vector Method For Clustering PaperDocument7 pagesNIPS 2000 A Support Vector Method For Clustering PaperMina MohammadiNo ratings yet
- Lecture 24-25: Weighted and Generalized Least Squares: 36-401, Fall 2015, Section B 19 and 24 November 2015Document27 pagesLecture 24-25: Weighted and Generalized Least Squares: 36-401, Fall 2015, Section B 19 and 24 November 2015Juan CamiloNo ratings yet
- Modest AdaBoostDocument4 pagesModest AdaBoostLucas GallindoNo ratings yet
- Weighted Residual MethodDocument37 pagesWeighted Residual MethodBharath ReddyNo ratings yet
- TMP 560Document9 pagesTMP 560FrontiersNo ratings yet
- Gauss Nodes Revolution: Numerical Integration Theory Radically Simplified And GeneralisedFrom EverandGauss Nodes Revolution: Numerical Integration Theory Radically Simplified And GeneralisedNo ratings yet
- 2 Megabit (256 K X 8-Bit) CMOS EPROM: Distinctive CharacteristicsDocument12 pages2 Megabit (256 K X 8-Bit) CMOS EPROM: Distinctive CharacteristicsVictor TruccoNo ratings yet
- Kelas 10 SMA 10405 Inggris Unit 5Document5 pagesKelas 10 SMA 10405 Inggris Unit 5Engga FebriantiNo ratings yet
- Types of ProductionDocument2 pagesTypes of ProductionromwamaNo ratings yet
- CM (1921) Monthly Test-1 - Off LineDocument20 pagesCM (1921) Monthly Test-1 - Off Linemehul pantNo ratings yet
- 2.1 Energy Flow in An EcosystemDocument13 pages2.1 Energy Flow in An EcosystemJoanne OngNo ratings yet
- Group 1 Hydraulic PumpDocument6 pagesGroup 1 Hydraulic Pump02 Darshana JadhavNo ratings yet
- EIHA-THC Levels in Hemp FoodDocument3 pagesEIHA-THC Levels in Hemp FoodMichal TőzsérNo ratings yet
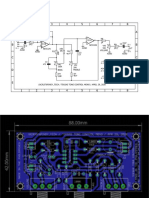
- Teksas Tone Control MonoDocument17 pagesTeksas Tone Control MonoRhenz TalhaNo ratings yet
- WankelDocument24 pagesWankelKunchala SaiNo ratings yet
- Nutritional StatusDocument13 pagesNutritional StatusArlene ValenzuelaNo ratings yet
- Chapter 04 Skeletal NotesDocument36 pagesChapter 04 Skeletal NotesElizabeth WoodNo ratings yet
- Industry Implications For Global Supply ChainsDocument4 pagesIndustry Implications For Global Supply ChainsPhương Anh NguyễnNo ratings yet
- Ijesrt: International Journal of Engineering Sciences & Research TechnologyDocument11 pagesIjesrt: International Journal of Engineering Sciences & Research TechnologyAna MariaNo ratings yet
- CM 42-06Document2 pagesCM 42-06Chairul MukiyatNo ratings yet
- MCqs & Q Ans For Class 9Document61 pagesMCqs & Q Ans For Class 9Shahbaz Siddikie100% (1)
- My Kind Neighbour Simple Present Grammar Guides Reading Comprehension Exercises Tes - 74419Document1 pageMy Kind Neighbour Simple Present Grammar Guides Reading Comprehension Exercises Tes - 74419algarinejo100% (1)
- Literature Review of Speed Control of Induction MotorDocument4 pagesLiterature Review of Speed Control of Induction MotoraflsmperkNo ratings yet
- Diet Modified in ConsistencyDocument34 pagesDiet Modified in Consistencycriselda desistoNo ratings yet
- 2010-2004 Touch Up Paint CatalogDocument23 pages2010-2004 Touch Up Paint CatalogLucas WebbNo ratings yet
- Bitting Your Horse BlueprintDocument17 pagesBitting Your Horse BlueprintPaola TorresNo ratings yet
- ENGR 260 - Circuits and Devices: COURSE SYLLABUS - Spring 2015Document4 pagesENGR 260 - Circuits and Devices: COURSE SYLLABUS - Spring 2015saintNo ratings yet